You might also like
- HMT Mandrel Bending 101Document80 pagesHMT Mandrel Bending 101zaiofracassadoNo ratings yet
- Plasma Arc Voltage Torch Height Controller: Operation Manual Vision 1404Document23 pagesPlasma Arc Voltage Torch Height Controller: Operation Manual Vision 1404BoroDragovicNo ratings yet
- Syntec InfoDocument14 pagesSyntec InfoGeorgi HelyanNo ratings yet
- User Manual Io en v2Document15 pagesUser Manual Io en v2bhlebarovNo ratings yet
- Machine Tools, Metal Cutting Types World Summary: Market Values & Financials by CountryFrom EverandMachine Tools, Metal Cutting Types World Summary: Market Values & Financials by CountryNo ratings yet
- STE Action Plan 2021-2022Document5 pagesSTE Action Plan 2021-2022Bernadette L. Macadangdang100% (1)
- Soft Limit ProcedureDocument11 pagesSoft Limit Procedureradio-chaserNo ratings yet
- UCCNC UsersmanualDocument80 pagesUCCNC UsersmanualcristinaNo ratings yet
- Mach3 Software Installation GuideDocument9 pagesMach3 Software Installation Guidegabrieldromano1No ratings yet
- Probe Mach3Document1 pageProbe Mach3Paulo TeixeiraNo ratings yet
- mf70 PKGDocument19 pagesmf70 PKGCarlos RamirezNo ratings yet
- Analog Inputs With Arduino & Mach3Document8 pagesAnalog Inputs With Arduino & Mach3Francisco Campoverde100% (2)
- Mach3 VBDocument9 pagesMach3 VBjavedpakNo ratings yet
- Features:: Mach3 USB Card Installation ManualDocument42 pagesFeatures:: Mach3 USB Card Installation ManualAndronic SebastianNo ratings yet
- CNC Controller RZNC 0901 User Manual RuDocument34 pagesCNC Controller RZNC 0901 User Manual RuEmill CncNo ratings yet
- Install: Windows: GRBL 1.1Document31 pagesInstall: Windows: GRBL 1.1Martas DeskNo ratings yet
- Emco Retrofit With UCN5804BDocument12 pagesEmco Retrofit With UCN5804B63ragtopNo ratings yet
- Linuxcnc GcodeDocument1 pageLinuxcnc Gcodekk_kamalakkannanNo ratings yet
- Operation Manual KH-212Document63 pagesOperation Manual KH-212Jorge Centeno Ramos100% (2)
- LinuxCNC IntegratorDocument21 pagesLinuxCNC IntegratormilknaniNo ratings yet
- 802600r4 Lift PDFDocument20 pages802600r4 Lift PDFEliane SouzaNo ratings yet
- EC300 User Manual V2-NvcncDocument24 pagesEC300 User Manual V2-NvcncJacpro Automation SacNo ratings yet
- Home Built 4x8ft CNC Plasma Metal Cutting SystemDocument26 pagesHome Built 4x8ft CNC Plasma Metal Cutting SystemFauzi Ma'arifNo ratings yet
- CNC Plasma Torch ConstructionDocument2 pagesCNC Plasma Torch ConstructionMariane MottaNo ratings yet
- 3 Axis TB6560 CNC Driver Board Users ManualDocument13 pages3 Axis TB6560 CNC Driver Board Users ManualJoão Luis Paiva JuniorNo ratings yet
- INDRAMAT Manuals 2065 PDFDocument346 pagesINDRAMAT Manuals 2065 PDFHoracio BritezNo ratings yet
- 3 Axis TB6600 CNC Driver Board Users ManualDocument10 pages3 Axis TB6600 CNC Driver Board Users Manualalvarnal100% (2)
- ST-V2 Mach3 Board PDFDocument12 pagesST-V2 Mach3 Board PDFCaraiane CatalinNo ratings yet
- 4 Axis 500KHz Linkage Offline Motion Controller System PLC Control G Code+100 Pulse Handwheel MPG With Emergency Stop For CNC Router Engraving Milling Lathe Machine RMHV3.1Document11 pages4 Axis 500KHz Linkage Offline Motion Controller System PLC Control G Code+100 Pulse Handwheel MPG With Emergency Stop For CNC Router Engraving Milling Lathe Machine RMHV3.1jonNo ratings yet
- 9.4 Process AdjustmentDocument11 pages9.4 Process AdjustmentHugo Luis Escalante100% (1)
- Supply Module TVM 2.4: RexrothDocument65 pagesSupply Module TVM 2.4: RexrothZoran ŠiručkaNo ratings yet
- Mach3 Tutorial: Setting Up A Basic Three Axis Milling MachineDocument14 pagesMach3 Tutorial: Setting Up A Basic Three Axis Milling Machinezealous100% (4)
- Stepper Motor & Drivers - USB MACH3 4 Axis Controller - PENTING!Document6 pagesStepper Motor & Drivers - USB MACH3 4 Axis Controller - PENTING!FalahNo ratings yet
- G100 Set Up Guide Rev.1 9-19-07Document34 pagesG100 Set Up Guide Rev.1 9-19-07Milton MarinNo ratings yet
- P4 I 65 GDocument36 pagesP4 I 65 GRoccoGranataNo ratings yet
- Mach4 CNC Control Software Licensing and ConfigurationDocument25 pagesMach4 CNC Control Software Licensing and ConfigurationAlessandro BraatzNo ratings yet
- Apostila PowerMILL 5.5 - 5 EixosDocument126 pagesApostila PowerMILL 5.5 - 5 EixosRoberto SilvaNo ratings yet
- SheetCam TNG Plasma Manual - A4Document138 pagesSheetCam TNG Plasma Manual - A4Jose Antonio Siñani VilteNo ratings yet
- PluginTutorial V01Document92 pagesPluginTutorial V01Vincenzo PaternòNo ratings yet
- KSE CNC ISO 6983-ReferenceManual-EngDocument52 pagesKSE CNC ISO 6983-ReferenceManual-EngMartin LeeNo ratings yet
- GRBL Software InstructionsDocument17 pagesGRBL Software InstructionsLuis Adolfo Hernandez LaraNo ratings yet
- Computer Numerical Control CNC: Ken Youssefi Mechanical Engineering DepartmentDocument43 pagesComputer Numerical Control CNC: Ken Youssefi Mechanical Engineering DepartmentSreedhar PugalendhiNo ratings yet
- 4-axis CNC hot wire foam cutterDocument22 pages4-axis CNC hot wire foam cutterOtto GonzalezNo ratings yet
- Eurotech B700 SeriesDocument4 pagesEurotech B700 SeriesCNC SYSTEMSNo ratings yet
- Ajax Mach3 Operators ManualDocument65 pagesAjax Mach3 Operators Manualjacksonholland8335100% (1)
- User Manual-MACH3-MKX-V1.0Document40 pagesUser Manual-MACH3-MKX-V1.0Daniel NituNo ratings yet
- Advanced CSDocument192 pagesAdvanced CSbilly dillpickerNo ratings yet
- Mach3Turn 1.84 PDFDocument137 pagesMach3Turn 1.84 PDFAlejandro Quiroz Gracia100% (1)
- Network license installation guideDocument5 pagesNetwork license installation guide09123asNo ratings yet
- G Codes CommandsDocument45 pagesG Codes CommandsordamNo ratings yet
- UC400ETH ManualDocument21 pagesUC400ETH ManualJonathan Louie PondaraNo ratings yet
- UC300ETH-5LPT Ethernet Motion Controller Setup GuideDocument22 pagesUC300ETH-5LPT Ethernet Motion Controller Setup Guideion sudituNo ratings yet
- BBCService ManualDocument90 pagesBBCService Manualjon_scribd2372No ratings yet
- Sensacore Hyperterminal Standard Interface Serial USB or RS-232 ManualDocument17 pagesSensacore Hyperterminal Standard Interface Serial USB or RS-232 ManualJosef GrapesNo ratings yet
- Mango Habanero Hot Sauce RecipeDocument2 pagesMango Habanero Hot Sauce RecipeKenny HebertNo ratings yet
- Untitled 1Document1 pageUntitled 1Kenny HebertNo ratings yet
- ICG Tracking SheetDocument8 pagesICG Tracking SheetKenny HebertNo ratings yet
- Automated Hydroponic System Build – Projects _ Kyle GabrielDocument93 pagesAutomated Hydroponic System Build – Projects _ Kyle GabrielKenny HebertNo ratings yet
- Bone DustDocument1 pageBone DustKenny HebertNo ratings yet
- Full Production ControlDocument14 pagesFull Production ControlKenny HebertNo ratings yet
- Old SmokeyDocument2 pagesOld SmokeyKenny HebertNo ratings yet
- Akose Ifa To Attract Financial SuccessDocument1 pageAkose Ifa To Attract Financial SuccessRichard Pedraja100% (11)
- Monarch Ss BB C CK Cu Cy Ee K M N NN W LathesDocument0 pagesMonarch Ss BB C CK Cu Cy Ee K M N NN W LathesswooshcmkNo ratings yet
- Centroid VCP Users ManualDocument53 pagesCentroid VCP Users ManualIfa_BosheNo ratings yet
- Millermatic 210Document56 pagesMillermatic 210Kenny HebertNo ratings yet
- Threading Handbook: ISCAR's Reference Guide For Threading ApplicationsDocument277 pagesThreading Handbook: ISCAR's Reference Guide For Threading ApplicationsAndreyNo ratings yet
- Gecko203v WiringDocument1 pageGecko203v WiringKenny HebertNo ratings yet
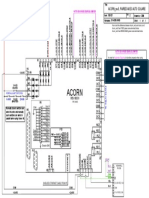
- Acorn Pair AxesDocument1 pageAcorn Pair AxesIfa_BosheNo ratings yet
- ACORN Axis Driven Turret Instructions Rev3Document2 pagesACORN Axis Driven Turret Instructions Rev3Kenny HebertNo ratings yet
- THC enDocument8 pagesTHC enchompink6900No ratings yet
- Abrasion TestDocument7 pagesAbrasion TestMohd SyahrulizamNo ratings yet
- DNV-RTR Specialist Certification PDFDocument6 pagesDNV-RTR Specialist Certification PDFshafeeqm3086No ratings yet
- Dielectric Properties Analysis of Gas Turbine Synchronous Generator by Polarization and Depolarization Current MeasuremenDocument4 pagesDielectric Properties Analysis of Gas Turbine Synchronous Generator by Polarization and Depolarization Current MeasuremenAriNo ratings yet
- Strand & Funtowicz Springer2017Document14 pagesStrand & Funtowicz Springer2017Roger StrandNo ratings yet
- (CIDECT DG3) - Design Guide For Rectangular Hollow Section (RHS) Joints Under Predominantly Static LoadingDocument156 pages(CIDECT DG3) - Design Guide For Rectangular Hollow Section (RHS) Joints Under Predominantly Static Loading_at_to_75% (4)
- DCMotorsDocument19 pagesDCMotorsAndrew BuckleyNo ratings yet
- 4343 11393 1 PBDocument4 pages4343 11393 1 PBYong PanNo ratings yet
- DO-260, DO-260A, DO-260B DifferencesDocument11 pagesDO-260, DO-260A, DO-260B DifferencesVitaly RybakovNo ratings yet
- CSC 222 - Lecture 1Document30 pagesCSC 222 - Lecture 1trenches4446No ratings yet
- Triaxial Accelerometer With Integral Magnet (A0643TX)Document2 pagesTriaxial Accelerometer With Integral Magnet (A0643TX)ORAMAYNo ratings yet
- Quantel Optimis II Service Manual 11 20Document10 pagesQuantel Optimis II Service Manual 11 20Vladimir LevchenkoNo ratings yet
- BV261 - U Type Butterfly ValveDocument2 pagesBV261 - U Type Butterfly ValveFAIYAZ AHMEDNo ratings yet
- IM0973112 Camera AFZ EN A04 MailDocument12 pagesIM0973112 Camera AFZ EN A04 MailEmerson BatistaNo ratings yet
- CPK Guide 0211 TECH1Document11 pagesCPK Guide 0211 TECH1Mark LacroNo ratings yet
- Quot - Leak Tester BP Ridwan - PTI Cosmetics - 08apr21Document6 pagesQuot - Leak Tester BP Ridwan - PTI Cosmetics - 08apr21mario gultomNo ratings yet
- Quality Planning ProcessDocument47 pagesQuality Planning ProcessRAZOR GAMINGNo ratings yet
- JBoss Enterprise Application Platform-5-Performance Tuning Guide-En-USDocument75 pagesJBoss Enterprise Application Platform-5-Performance Tuning Guide-En-USvali07No ratings yet
- Pinch Technology: Minahil Qumreen 2015-CH-430Document38 pagesPinch Technology: Minahil Qumreen 2015-CH-430adnan100% (2)
- Q4FY23 Investor PresentationDocument49 pagesQ4FY23 Investor PresentationAradhyaNo ratings yet
- Vertical Turbine Pumps Engineering Data: Effective April 1, 2003Document11 pagesVertical Turbine Pumps Engineering Data: Effective April 1, 2003Israel CastilloNo ratings yet
- Definite Integrals and Trigonometric FunctionsDocument4 pagesDefinite Integrals and Trigonometric Functionskartikey papnoiNo ratings yet
- Kit de CommunicationDocument3 pagesKit de CommunicationdupontNo ratings yet
- A Systematic Review of Bio-Asphalt For Flexible Pavement ApplicationsDocument16 pagesA Systematic Review of Bio-Asphalt For Flexible Pavement ApplicationsadinaNo ratings yet
- NTDC Metering Data AnalysisDocument110 pagesNTDC Metering Data AnalysisJawad AmjadNo ratings yet
- SBI Online Registration Form for CINB SaralDocument1 pageSBI Online Registration Form for CINB Saralamitjainis60% (5)
- IRJET Online Student PortalDocument6 pagesIRJET Online Student PortalEmmanuel FerolinoNo ratings yet
- File (SQL Tutorial)Document81 pagesFile (SQL Tutorial)imranbaiggeekNo ratings yet
- Producing Cleaned-Up and In-Betweened DrawingsDocument10 pagesProducing Cleaned-Up and In-Betweened DrawingsErika C. Delos SantosNo ratings yet
- LOGIQ Book Cart Instructions Quick Card - English - UM - 2399122-100 - 000Document2 pagesLOGIQ Book Cart Instructions Quick Card - English - UM - 2399122-100 - 000Dody Setyo AnggoroNo ratings yet