You might also like
- 752 HandbookDocument216 pages752 HandbookAbdul Shokor Abd Talib100% (4)
- Micro 2x16 Aro ControlsDocument4 pagesMicro 2x16 Aro ControlsOsvaldo Meza0% (1)
- SDX Developer GuideDocument11 pagesSDX Developer GuideS Surya DharmaNo ratings yet
- Dual Rotor Generator Base PaperDocument4 pagesDual Rotor Generator Base Paperraja mNo ratings yet
- Analytical Method For The Design of A Machine With Aligned and Skewed Permanent MagnetsDocument8 pagesAnalytical Method For The Design of A Machine With Aligned and Skewed Permanent MagnetsAmit sahaNo ratings yet
- Optimum Values For Magnet and Armature Winding Thickness For Axial Field PM PDFDocument6 pagesOptimum Values For Magnet and Armature Winding Thickness For Axial Field PM PDFrakeshee2007No ratings yet
- A Novel Internal Fault Analysis of A Brushless DC Motor Using Winding Function TheoryDocument6 pagesA Novel Internal Fault Analysis of A Brushless DC Motor Using Winding Function TheorymssmsNo ratings yet
- Brushless DC MotorsDocument14 pagesBrushless DC MotorsNeroGetsu100% (1)
- Ks PaperDocument5 pagesKs PaperSatyam SwarupNo ratings yet
- Chapter 3 Induction MotorDocument21 pagesChapter 3 Induction Motorahmed aliNo ratings yet
- Modeling Vibration in an Induction MotorDocument38 pagesModeling Vibration in an Induction MotorYasi YamuNo ratings yet
- Modelling and Control of BLDC MotorDocument39 pagesModelling and Control of BLDC Motoritstutan_749916692No ratings yet
- Design and Modelling of BLDC Motor For ADocument7 pagesDesign and Modelling of BLDC Motor For AShubhzsNo ratings yet
- 3.basic Concept of Rotating Electrical Machine PDFDocument126 pages3.basic Concept of Rotating Electrical Machine PDFStadpyrkhat lyngkhoiNo ratings yet
- Kiani, M., Lee, W.-J., Kenarangui, R., & Fahimi, B. (2007) - Detection of Rotor Faults in Synchronous GeneratorsDocument6 pagesKiani, M., Lee, W.-J., Kenarangui, R., & Fahimi, B. (2007) - Detection of Rotor Faults in Synchronous GeneratorsjuanNo ratings yet
- BLDC Motor Application Techniques 1701585005Document50 pagesBLDC Motor Application Techniques 1701585005qn27kkbf4hNo ratings yet
- Finite Element Analysis of Switched Reluctance Motor With Exterior RotorDocument4 pagesFinite Element Analysis of Switched Reluctance Motor With Exterior RotorerpublicationNo ratings yet
- Experiment No. 2.4 - The Squirrel-Cage Induction Motor ObjectiveDocument3 pagesExperiment No. 2.4 - The Squirrel-Cage Induction Motor ObjectiveKristine AldayNo ratings yet
- Experimental and Analytical Study of Single-Phase Squirrel-Cage Induction Motor Considering End-Ring Porosity RateDocument4 pagesExperimental and Analytical Study of Single-Phase Squirrel-Cage Induction Motor Considering End-Ring Porosity RateJulioNo ratings yet
- SRM 20230829 0001Document7 pagesSRM 20230829 0001geceeetlpNo ratings yet
- Brushless DC Motor ReportDocument6 pagesBrushless DC Motor ReportSaumik HeronNo ratings yet
- Analysis and Comparison of Two Brushless DC Generators With Doubly Salient Structure and Stator Field WindingDocument4 pagesAnalysis and Comparison of Two Brushless DC Generators With Doubly Salient Structure and Stator Field WindingmohammadNo ratings yet
- 1792 ON NO.: OF A Parametric Synchronous Motor Made For TestDocument3 pages1792 ON NO.: OF A Parametric Synchronous Motor Made For TestTarelli RiccardoNo ratings yet
- 8.1 Advantages of Electric MotorsDocument44 pages8.1 Advantages of Electric MotorsOjo MojolaoluwaNo ratings yet
- CH 3 MachineDocument22 pagesCH 3 MachineTeshale AlemieNo ratings yet
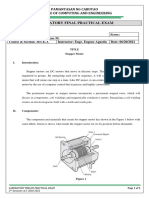
- Laboratory Final Practical Exam: Pamantasan NG Cabuyao College of Computing and EngineeringDocument3 pagesLaboratory Final Practical Exam: Pamantasan NG Cabuyao College of Computing and EngineeringKrizalene ResurreccionNo ratings yet
- Control Lab Manual 01Document11 pagesControl Lab Manual 01doppler9effectNo ratings yet
- Speed Control of Brushless DC Motor by Using Fuzzy Logic Pi ControllerDocument8 pagesSpeed Control of Brushless DC Motor by Using Fuzzy Logic Pi ControlleradilNo ratings yet
- Diode Clamped Multilevel Inverter Fed BLDC Motor Using SEPIC ConverterDocument5 pagesDiode Clamped Multilevel Inverter Fed BLDC Motor Using SEPIC Convertermanoj kumarNo ratings yet
- Considerations Direct Control Switched: Reluctance MotorsDocument5 pagesConsiderations Direct Control Switched: Reluctance MotorsSuman SahaNo ratings yet
- E1 Squirrel Cage Induction MotorDocument13 pagesE1 Squirrel Cage Induction MotorFitri VongolaNo ratings yet
- Eee-233 R1Document14 pagesEee-233 R1ArifNo ratings yet
- Chapter Three Induction Machines: Electromechanical ConversionDocument67 pagesChapter Three Induction Machines: Electromechanical ConversiontsegayNo ratings yet
- AC Induction Motor FundamentalsDocument24 pagesAC Induction Motor Fundamentalsrohtahir100% (3)
- 1 s2.0 S0196890401000164 MainDocument11 pages1 s2.0 S0196890401000164 MainKaderNo ratings yet
- 10 - UkaniszynDocument11 pages10 - UkaniszynLavanya ChandranNo ratings yet
- Analysis of Power and Torque For The IPM Motors With High Flux Density in StatorDocument8 pagesAnalysis of Power and Torque For The IPM Motors With High Flux Density in Statorphan hoai nam PhanNo ratings yet
- 001 Bien KowskiDocument5 pages001 Bien KowskikarnatisharathNo ratings yet
- Drive M 5 TheoryDocument25 pagesDrive M 5 TheoryMayank MeshramNo ratings yet
- PMSM Vs Induction MotorDocument4 pagesPMSM Vs Induction MotorGarry GeorgeNo ratings yet
- Wevj 05 00546 PDFDocument4 pagesWevj 05 00546 PDFHenryHutabaratNo ratings yet
- Pole-Changing and Variable Machine ConstantsDocument4 pagesPole-Changing and Variable Machine ConstantsOnur FilizoğluNo ratings yet
- ELE290 Induction Motor GuideDocument21 pagesELE290 Induction Motor GuideHarizx SaufixNo ratings yet
- Design of PMSMDocument5 pagesDesign of PMSMrizwan hassanNo ratings yet
- Calculation and Analysis of Unbalanced Magnetic Pulls of Different Stator Winding Setups in Static Eccentric Induction MotorDocument9 pagesCalculation and Analysis of Unbalanced Magnetic Pulls of Different Stator Winding Setups in Static Eccentric Induction Motor9096664279No ratings yet
- Electrical Machines Lab March 16 UpdateDocument53 pagesElectrical Machines Lab March 16 Updatepeter vanderNo ratings yet
- FEM of Induction MotorDocument6 pagesFEM of Induction MotoromokhafeNo ratings yet
- DC MotorDocument6 pagesDC MotorLeandro CamargoNo ratings yet
- Simulation Study on Direct Torque Control of Induction Motor using Neural NetworkDocument5 pagesSimulation Study on Direct Torque Control of Induction Motor using Neural NetworkPraful YadavNo ratings yet
- Chapter 7 Induction Machines-EEE301Document96 pagesChapter 7 Induction Machines-EEE301DilekNo ratings yet
- Induction motor-UNIT-IVDocument23 pagesInduction motor-UNIT-IVVaibhav SanNo ratings yet
- Advanced Electric Drives: Analysis, Control, and Modeling Using MATLAB / SimulinkFrom EverandAdvanced Electric Drives: Analysis, Control, and Modeling Using MATLAB / SimulinkNo ratings yet
- Home-made Toy Motors: A practical handbook giving detailed instructions for building simple but operative electric motorsFrom EverandHome-made Toy Motors: A practical handbook giving detailed instructions for building simple but operative electric motorsNo ratings yet
- Molecules in Electromagnetic Fields: From Ultracold Physics to Controlled ChemistryFrom EverandMolecules in Electromagnetic Fields: From Ultracold Physics to Controlled ChemistryNo ratings yet
- Organic Light-Emitting Transistors: Towards the Next Generation Display TechnologyFrom EverandOrganic Light-Emitting Transistors: Towards the Next Generation Display TechnologyNo ratings yet
- Physics and Technology of Crystalline Oxide Semiconductor CAAC-IGZO: Application to LSIFrom EverandPhysics and Technology of Crystalline Oxide Semiconductor CAAC-IGZO: Application to LSINo ratings yet
- A New System of Alternating Current Motors and Transformers and Other EssaysFrom EverandA New System of Alternating Current Motors and Transformers and Other EssaysRating: 5 out of 5 stars5/5 (1)
- INWHEEL MOTOR - Challenges and OppportunitiesDocument12 pagesINWHEEL MOTOR - Challenges and OppportunitiesAakarsh VermaNo ratings yet
- Induction Motor Evaluation PDFDocument6 pagesInduction Motor Evaluation PDFAakarsh VermaNo ratings yet
- Differential ATSDocument17 pagesDifferential ATSAakarsh VermaNo ratings yet
- Fuel Temperature SensorDocument12 pagesFuel Temperature SensorAakarsh Verma100% (2)
- AAC Presentation On Compressor Dig, Faults & RemediesDocument9 pagesAAC Presentation On Compressor Dig, Faults & RemediesAakarsh VermaNo ratings yet
- V4Document5 pagesV4Aakarsh VermaNo ratings yet
- Fault Diagnosis For BatteriesDocument2 pagesFault Diagnosis For BatteriesAakarsh VermaNo ratings yet
- Three Dimention Printing: What Is 3D Printing?Document6 pagesThree Dimention Printing: What Is 3D Printing?Aakarsh VermaNo ratings yet
- Production Technology PresentationDocument10 pagesProduction Technology PresentationAakarsh VermaNo ratings yet
- Types of Suspension Systems - Dependent vs IndependentDocument13 pagesTypes of Suspension Systems - Dependent vs IndependentAakarsh VermaNo ratings yet
- CylinderDocument7 pagesCylinderAakarsh VermaNo ratings yet
- Locking Differential TypesDocument5 pagesLocking Differential TypesAakarsh VermaNo ratings yet
- Series Coading For UnlockingDocument1 pageSeries Coading For UnlockingAakarsh VermaNo ratings yet
- 3D PrintingDocument6 pages3D PrintingAakarsh VermaNo ratings yet
- LSDDocument3 pagesLSDAakarsh VermaNo ratings yet
- SRM TRP Engineering College Lesson Plan for Green Building DesignDocument3 pagesSRM TRP Engineering College Lesson Plan for Green Building Designmaran2326No ratings yet
- Hormann Lineamatic Gate OperatorsDocument46 pagesHormann Lineamatic Gate OperatorsGiorgos GewrgiouNo ratings yet
- Guidelines Poster PresentationDocument3 pagesGuidelines Poster PresentationtatianantlNo ratings yet
- Workflow Component Error ResolveDocument3 pagesWorkflow Component Error ResolveMosunmolaNo ratings yet
- Appendix A SchematicsDocument14 pagesAppendix A SchematicsspirisNo ratings yet
- Background Service Solution: Ti 04-11 11 21 en-GB Technical InformationDocument13 pagesBackground Service Solution: Ti 04-11 11 21 en-GB Technical InformationRuanNo ratings yet
- "Cyber-Plus Evolution": Instruction ManualDocument106 pages"Cyber-Plus Evolution": Instruction Manualquequma7202No ratings yet
- Lopower TutasDocument7 pagesLopower TutasNabil IshamNo ratings yet
- Wifi SecurityDocument17 pagesWifi Securityviniskykumar100% (2)
- Product Guide 2021 EN LRDocument30 pagesProduct Guide 2021 EN LRCARLOS CHAVEZNo ratings yet
- Apache Hive DDL DML, QueriesDocument4 pagesApache Hive DDL DML, QueriesRahul Singh100% (1)
- D - MNL0D750M Control de Portones ElectricosDocument0 pagesD - MNL0D750M Control de Portones ElectricosbernalgutierrezNo ratings yet
- Simulation of 2.4Ghz Microstrip Patch Antenna Using Ebg StructureDocument5 pagesSimulation of 2.4Ghz Microstrip Patch Antenna Using Ebg StructureSanjeev KumarNo ratings yet
- ChecklistDocument1 pageChecklistYahir andres Luna lopezNo ratings yet
- Explore Our 2018 Motorcycle CollectionDocument8 pagesExplore Our 2018 Motorcycle CollectionToni Kuzmanić100% (1)
- TCLDocument13 pagesTCLYc ChenNo ratings yet
- Logistics Coordinator with 5+ Years Experience Seeking New OpportunityDocument4 pagesLogistics Coordinator with 5+ Years Experience Seeking New OpportunityshafeerNo ratings yet
- Complete Additional Mathematics For Cambridge IGCSE® & O Level (PDFDDocument1 pageComplete Additional Mathematics For Cambridge IGCSE® & O Level (PDFDAriyan AriyanNo ratings yet
- 52 Sample ChapterDocument29 pages52 Sample ChapterSaroj GaireNo ratings yet
- Object Motion Detection in Home Security System Using The Binary-Image Comparison Method Based On Robot Operating System 2 and Raspberry PiDocument8 pagesObject Motion Detection in Home Security System Using The Binary-Image Comparison Method Based On Robot Operating System 2 and Raspberry PiRukmyy SapsuhaNo ratings yet
- Awia-Requirements 20201216175858Document2 pagesAwia-Requirements 20201216175858Pablo CartesNo ratings yet
- IRM 6 Website DefacementDocument2 pagesIRM 6 Website DefacementtaekNo ratings yet
- Systolic FIR Filter Design With Various Parallel Prefix Adders in FPGA: Performance AnalysisDocument5 pagesSystolic FIR Filter Design With Various Parallel Prefix Adders in FPGA: Performance AnalysishariNo ratings yet
- Build Your Own Electronic Ignition for Small EnginesDocument3 pagesBuild Your Own Electronic Ignition for Small EnginesIoannis KikNo ratings yet
- Rateb Swaiss CVDocument1 pageRateb Swaiss CVzaheerNo ratings yet
- G Ym 6 F 8 HEtoev 4 GEbDocument6 pagesG Ym 6 F 8 HEtoev 4 GEbPrakhar AgarwalNo ratings yet
- WESCO 33/11kV Primary Substation SpecificationDocument65 pagesWESCO 33/11kV Primary Substation SpecificationNima MahmoudpourNo ratings yet
- Web301 - Prelim LessonDocument85 pagesWeb301 - Prelim LessonJessabel DigaoNo ratings yet