You might also like
- Chapter 2 Study Questions Solution ManualDocument12 pagesChapter 2 Study Questions Solution ManualSebastiàn Valle100% (3)
- Inspire Physics 9 AdvanceDocument285 pagesInspire Physics 9 AdvanceJenan Zriak100% (2)
- Trainer Activity: All Adrift!Document6 pagesTrainer Activity: All Adrift!DollyNo ratings yet
- IELTS Academic Writing Task 1 by Rachel MitchellDocument109 pagesIELTS Academic Writing Task 1 by Rachel Mitchellshayansa4486% (7)
- Cargo Security Awareness - Etextbook - 2nd - Ed - 2016 - TCGP-79Document185 pagesCargo Security Awareness - Etextbook - 2nd - Ed - 2016 - TCGP-79kien Duy Phan80% (5)
- Queen'S University Midterm Examination Department of EconomicsDocument7 pagesQueen'S University Midterm Examination Department of EconomicsAsif Ahmed NeloyNo ratings yet
- CMPM NotesDocument3 pagesCMPM NoteskkkNo ratings yet
- Difference Between PERT and CPMDocument4 pagesDifference Between PERT and CPMRohit SethNo ratings yet
- Difference Between PERT and CPMDocument4 pagesDifference Between PERT and CPMIsd BambNo ratings yet
- PROJECT SCHEDULING TECHNIQUESDocument164 pagesPROJECT SCHEDULING TECHNIQUESPoreddy vineelaNo ratings yet
- CPM & PERT - Operations ResearchDocument6 pagesCPM & PERT - Operations ResearchVbNo ratings yet
- Pert/Cpm: Short Note: Pert: Project Evaluation and Review Technique (PERT) Is A Procedure Through WhichDocument13 pagesPert/Cpm: Short Note: Pert: Project Evaluation and Review Technique (PERT) Is A Procedure Through WhichHenryNo ratings yet
- ادعيه رمضانDocument2 pagesادعيه رمضانsmsm123alsaidNo ratings yet
- Critical Path Method (CPM) : Purpose of PERT AnalysisDocument3 pagesCritical Path Method (CPM) : Purpose of PERT AnalysisWicklife OtienoNo ratings yet
- 5.3 Critical Path Method (CPM) and Program Evaluation & Review Technique (Pert)Document6 pages5.3 Critical Path Method (CPM) and Program Evaluation & Review Technique (Pert)Charles VeranoNo ratings yet
- Diff. B/W CPM & PertDocument2 pagesDiff. B/W CPM & PertShubham GoelNo ratings yet
- Bba - 6sem - Project Appraisal - Lecture 41,42&43Document7 pagesBba - 6sem - Project Appraisal - Lecture 41,42&43Jordan ThapaNo ratings yet
- Advantages and Disadvantages of PERT CPM Advantages of PERTDocument4 pagesAdvantages and Disadvantages of PERT CPM Advantages of PERTRoen Jasper EviaNo ratings yet
- Chapter 11 - Project Management-2Document24 pagesChapter 11 - Project Management-2Dilip BrothersNo ratings yet
- CPM Pert DocumentDocument14 pagesCPM Pert DocumentRahul Velamala100% (1)
- Tools and Techniques of Project ManagementDocument4 pagesTools and Techniques of Project Managementsimmi33No ratings yet
- Pert & CPMDocument11 pagesPert & CPMPulkit Aggarwal100% (1)
- Pert and CPM and Their AdvantagesDocument4 pagesPert and CPM and Their AdvantagesAnirudh GuptaNo ratings yet
- PERT:-PERT Stands For "Programme Evaluation & Review Technique. PERT WasDocument4 pagesPERT:-PERT Stands For "Programme Evaluation & Review Technique. PERT WasTanvi AnandNo ratings yet
- Google Pert and CPMDocument7 pagesGoogle Pert and CPMnurin khatoonNo ratings yet
- Balt Normaleah PEM304Document3 pagesBalt Normaleah PEM304Armaden MamandiNo ratings yet
- Blue Professional Modern Business Project PresentationDocument16 pagesBlue Professional Modern Business Project PresentationEmere James P. TagoonNo ratings yet
- Operation Research ManagementDocument4 pagesOperation Research Managementlavesh732003No ratings yet
- Network Analysis: Programme Evaluation and Review Techniques (PERT)Document3 pagesNetwork Analysis: Programme Evaluation and Review Techniques (PERT)Jeyarajasekar TtrNo ratings yet
- PM FundamentalsDocument3 pagesPM FundamentalsFRANCISCO HERNANDEZNo ratings yet
- Project Time Management & SchedulingDocument42 pagesProject Time Management & SchedulingShahid AliNo ratings yet
- Uncertainty in Project Scheduling PDFDocument6 pagesUncertainty in Project Scheduling PDFecaripasNo ratings yet
- Project Management (Jan 05) - Group2Document21 pagesProject Management (Jan 05) - Group2hub sportxNo ratings yet
- PERT & CPM Time Estimation Critical Path TechniquesDocument24 pagesPERT & CPM Time Estimation Critical Path TechniquesVISHNU E SNo ratings yet
- Application of PERT and CPM On Project Management and Network Scheduling - 16900119031Document6 pagesApplication of PERT and CPM On Project Management and Network Scheduling - 16900119031Shourja GangulyNo ratings yet
- PERT Chart: Statistics-III Pert and CPMDocument7 pagesPERT Chart: Statistics-III Pert and CPMMd Ashikur RahmanNo ratings yet
- PERT and CPM: Comparison and Its DifferencesDocument5 pagesPERT and CPM: Comparison and Its DifferencesANIYIE ONYEKANo ratings yet
- Pert and CPMDocument5 pagesPert and CPMIjcams PublicationNo ratings yet
- Expose of Pert ChartDocument3 pagesExpose of Pert ChartArsene Junior Fotso WaboNo ratings yet
- Statistical tools for project analysisDocument2 pagesStatistical tools for project analysisanugraha vasanNo ratings yet
- Project Management Triangle: Time, Cost and ScopeDocument8 pagesProject Management Triangle: Time, Cost and ScopeajithNo ratings yet
- Critical Path Method (CPM)Document13 pagesCritical Path Method (CPM)April Joy FabialaNo ratings yet
- Demo About Pert CPMDocument12 pagesDemo About Pert CPMBenjamin D. RubinNo ratings yet
- Get architecture news and PERT analysis techniquesDocument1 pageGet architecture news and PERT analysis techniqueschetnaNo ratings yet
- Project management techniques PERT and CPM for on-time completionDocument11 pagesProject management techniques PERT and CPM for on-time completionECRCNo ratings yet
- Notes CPM & PertDocument8 pagesNotes CPM & Pertvamsi krishna balaga0% (1)
- PERT vs CPM: A 38-characterDocument3 pagesPERT vs CPM: A 38-characterKOKOWARA VIANo ratings yet
- Pert and CPM NotesDocument32 pagesPert and CPM NotesSanjana DasNo ratings yet
- HajakDocument2 pagesHajakJoyce ericka balonNo ratings yet
- Ms 4,5,6Document21 pagesMs 4,5,6siva gubbalaNo ratings yet
- What Is Project ManagementDocument19 pagesWhat Is Project Managementgill27888No ratings yet
- 4.5 Project Management ModifiedDocument32 pages4.5 Project Management Modifiedgopal sapkotaNo ratings yet
- Optimizing The ProjectDocument10 pagesOptimizing The ProjectRiddhi PirogiwalNo ratings yet
- 355 Yashana Lalwani Operations ResearchDocument8 pages355 Yashana Lalwani Operations ResearchYashana LalwaniNo ratings yet
- Facility Planning Network AnalysisDocument18 pagesFacility Planning Network AnalysismanipaldhakreyNo ratings yet
- CAED101 - JucoMartinCarlo - Quiz 3Document5 pagesCAED101 - JucoMartinCarlo - Quiz 3Martin Carlo A. JucoNo ratings yet
- Crashing Time Scheduling ProblemDocument9 pagesCrashing Time Scheduling ProblemeragornNo ratings yet
- OR Lavesh HTBMSM240Document5 pagesOR Lavesh HTBMSM240lavesh732003No ratings yet
- PERT and CPM Project Planning TechniquesDocument28 pagesPERT and CPM Project Planning TechniquesJayson PagalNo ratings yet
- CPM PERT in Operations ManagementDocument16 pagesCPM PERT in Operations ManagementAnshul100% (1)
- Department of Management Technology, Bells University of Technology, Ota, NigeriaDocument11 pagesDepartment of Management Technology, Bells University of Technology, Ota, NigeriaTika PsbNo ratings yet
- Jurnal AsingDocument11 pagesJurnal AsingKhoirun NisaNo ratings yet
- Application of Project Evaluation, Review Technique and Critical Path Method (PERT-CPM) Model in Monitoring Building ConstructionDocument14 pagesApplication of Project Evaluation, Review Technique and Critical Path Method (PERT-CPM) Model in Monitoring Building Constructiondinosaur x-drakeNo ratings yet
- CISA Exam-Testing Concept-PERT/CPM/Gantt Chart/FPA/EVA/Timebox (Chapter-3)From EverandCISA Exam-Testing Concept-PERT/CPM/Gantt Chart/FPA/EVA/Timebox (Chapter-3)Rating: 1.5 out of 5 stars1.5/5 (3)
- Question No1Document4 pagesQuestion No1adeel rafiqNo ratings yet
- Res - Meth.textbook 2006Document177 pagesRes - Meth.textbook 2006adeel rafiqNo ratings yet
- Residuals Vs Fitted Normal Q Q: 1.5 2.0 2.5 3.0 3.5 4.0 Fitted Values 2 1 0 1 2 Theoretical QuantilesDocument1 pageResiduals Vs Fitted Normal Q Q: 1.5 2.0 2.5 3.0 3.5 4.0 Fitted Values 2 1 0 1 2 Theoretical Quantilesadeel rafiqNo ratings yet
- Handbook For The Design, Construction, Operation, Monitoring and Maintenance of A Passive Landfill Gas Drainage and Biofiltration SystemDocument82 pagesHandbook For The Design, Construction, Operation, Monitoring and Maintenance of A Passive Landfill Gas Drainage and Biofiltration Systemadeel rafiqNo ratings yet
- 351-Article Text-660-1-10-20200219Document6 pages351-Article Text-660-1-10-20200219adeel rafiqNo ratings yet
- JEE 613 Final Exam answers wind energy research proposal combustionDocument2 pagesJEE 613 Final Exam answers wind energy research proposal combustionadeel rafiqNo ratings yet
- JEE 613 Research Methodology Email Course 2021Document4 pagesJEE 613 Research Methodology Email Course 2021adeel rafiqNo ratings yet
- Soil Moisture: Further ReadingDocument1 pageSoil Moisture: Further Readingadeel rafiqNo ratings yet
- Question No1Document4 pagesQuestion No1adeel rafiqNo ratings yet
- Affidavit for Degree EquivalenceDocument1 pageAffidavit for Degree EquivalenceShahabWassiNo ratings yet
- Res - Meth.textbook 2006Document177 pagesRes - Meth.textbook 2006adeel rafiqNo ratings yet
- Maximizing Bio-Gas Production from Sewage and Food WasteDocument8 pagesMaximizing Bio-Gas Production from Sewage and Food Wasteadeel rafiqNo ratings yet
- Professional Career Objectives': Aqeel Ahmad S/O Muhammad Rafiq Sialvi Colony, Ghulam Muhammad Abad, FaisalabadDocument1 pageProfessional Career Objectives': Aqeel Ahmad S/O Muhammad Rafiq Sialvi Colony, Ghulam Muhammad Abad, Faisalabadadeel rafiqNo ratings yet
- Affidavit (Face To Face Classes)Document1 pageAffidavit (Face To Face Classes)adeel rafiqNo ratings yet
- PSQCA Drinking WaterDocument37 pagesPSQCA Drinking WaterHassan Arslan Shahid100% (1)
- Statement of Purpose Study Plan Graduate-1Document4 pagesStatement of Purpose Study Plan Graduate-1adeel rafiqNo ratings yet
- Air Pollution MeterologyDocument22 pagesAir Pollution Meterologyadeel rafiqNo ratings yet
- Investigation of Open Dumping Site of Municipal Solid Waste in FaisalabadDocument3 pagesInvestigation of Open Dumping Site of Municipal Solid Waste in Faisalabadadeel rafiqNo ratings yet
- Danish GradesDocument4 pagesDanish GradesZeeshan AhmedNo ratings yet
- Jobs at Nishat Dairy FarmDocument1 pageJobs at Nishat Dairy Farmadeel rafiqNo ratings yet
- Statement of Purpose Study Plan Graduate-1Document4 pagesStatement of Purpose Study Plan Graduate-1adeel rafiqNo ratings yet
- Calculation of Weighted Average: With Grades Given As DigitsDocument2 pagesCalculation of Weighted Average: With Grades Given As DigitsMadhav SethiaNo ratings yet
- Calculation of Weighted Average: With Grades Given As DigitsDocument2 pagesCalculation of Weighted Average: With Grades Given As DigitsMadhav SethiaNo ratings yet
- Emission TypeDocument1 pageEmission Typeadeel rafiqNo ratings yet
- Project Management: HistoryDocument13 pagesProject Management: Historyadeel rafiqNo ratings yet
- Danish GradesDocument4 pagesDanish GradesZeeshan AhmedNo ratings yet
- FWMC With Its Existing Resources Is Capable To Collect 60Document1 pageFWMC With Its Existing Resources Is Capable To Collect 60adeel rafiqNo ratings yet
- UNIDO Pollutants in Tannery Effluents 2000Document26 pagesUNIDO Pollutants in Tannery Effluents 2000Shiraz QaiyumNo ratings yet
- Ps1 GeneralDocument2 pagesPs1 Generalkulin123456No ratings yet
- 255 Introduction Vocational Service enDocument12 pages255 Introduction Vocational Service enDmitri PopaNo ratings yet
- 7 Principles Video Content CreationDocument2 pages7 Principles Video Content CreationJackiee Fiorela PalaciosNo ratings yet
- RTR - Nonmetallic Pipng ProcedureDocument16 pagesRTR - Nonmetallic Pipng Proceduremoytabura96100% (1)
- Mumbai: City of DreamsDocument14 pagesMumbai: City of DreamsAnika WahalNo ratings yet
- Listado 2 4ghzDocument4 pagesListado 2 4ghzRogerNo ratings yet
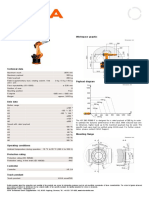
- KR 280 R3080 F technical specificationsDocument1 pageKR 280 R3080 F technical specificationsDorobantu CatalinNo ratings yet
- Materials that absorb and decayDocument2 pagesMaterials that absorb and decayDominic NoblezaNo ratings yet
- Choose the Right Low Boy Trailer ModelDocument42 pagesChoose the Right Low Boy Trailer ModelOdlnayer AllebramNo ratings yet
- Sidhil - ICT Design EngineerDocument3 pagesSidhil - ICT Design Engineeratif_aman123No ratings yet
- Brfo193 Radiotherapy Dose Fractionation Third-Edition PDFDocument137 pagesBrfo193 Radiotherapy Dose Fractionation Third-Edition PDFMed MedNo ratings yet
- 2narrative Essay - My Favorite TeacherDocument9 pages2narrative Essay - My Favorite TeacherHerbertKoh100% (1)
- Review of Dr. Mark Cheng's "Prehab-Rehab 101" SeriesDocument6 pagesReview of Dr. Mark Cheng's "Prehab-Rehab 101" SeriesWilliam TortorielloNo ratings yet
- HW3 - Chapter 9-2Document3 pagesHW3 - Chapter 9-2Zachary MedeirosNo ratings yet
- PB ManualDocument23 pagesPB ManualwilyNo ratings yet
- Carlo Gavazzi EM26-96Document4 pagesCarlo Gavazzi EM26-96dimis trumpasNo ratings yet
- Position Paper For The Art Controversy "Poleteismo" of Mideo CruzDocument2 pagesPosition Paper For The Art Controversy "Poleteismo" of Mideo CruzAalayah Gwendel Wayne CarumbaNo ratings yet
- Spelling Bee Word ListDocument26 pagesSpelling Bee Word Listsan_6303No ratings yet
- CIC-presentation of RP-577 PresentationDocument181 pagesCIC-presentation of RP-577 PresentationIbrahim Eldesoky75% (4)
- Myths of Membership The Politics of Legitimation in UN Security Council ReformDocument20 pagesMyths of Membership The Politics of Legitimation in UN Security Council ReformCaroline GassiatNo ratings yet
- SIHI - Control Narrative Proc Compressor UnitDocument5 pagesSIHI - Control Narrative Proc Compressor Unitman_y2k100% (1)
- LPI PH PDFDocument4 pagesLPI PH PDFHumberto Tapias CutivaNo ratings yet
- Flared Separable FittingDocument9 pagesFlared Separable FittingbenNo ratings yet
- Khwaja Moinuddin Chishti Language UniversityDocument30 pagesKhwaja Moinuddin Chishti Language UniversityShivam ShuklaNo ratings yet
- ECMT1020 - Week 06 WorkshopDocument4 pagesECMT1020 - Week 06 Workshopperthwashington.j9t23No ratings yet