You might also like
- Homework 2: Lasso Regression: 1.1 Data Set and Programming Problem OverviewDocument11 pagesHomework 2: Lasso Regression: 1.1 Data Set and Programming Problem OverviewMayur AgrawalNo ratings yet
- Exercise 7 Submission Group 12Document22 pagesExercise 7 Submission Group 12Mehmet YalçınNo ratings yet
- Machine Learning For Data ScienceDocument20 pagesMachine Learning For Data SciencepraveenakgNo ratings yet
- COMP34120 - AI & Games Sem 2Document14 pagesCOMP34120 - AI & Games Sem 2Jordas AndreiNo ratings yet
- Week 7 Laboratory ActivityDocument12 pagesWeek 7 Laboratory ActivityGar NoobNo ratings yet
- A Short Introduction To The Caret Package: Max Kuhn June 20, 2013Document10 pagesA Short Introduction To The Caret Package: Max Kuhn June 20, 2013Renukha PannalaNo ratings yet
- Intro To ForecastingDocument15 pagesIntro To ForecastingtrickledowntheroadNo ratings yet
- Linear Regression Using PythonDocument15 pagesLinear Regression Using PythonGnanarajNo ratings yet
- Lab4 MultipleLinearRegressionDocument7 pagesLab4 MultipleLinearRegressionJason ThiamNo ratings yet
- NLopt Tutorial - AbInitioDocument13 pagesNLopt Tutorial - AbInitiorahulagarwal33No ratings yet
- Lab NN KNN SVMDocument13 pagesLab NN KNN SVMmaaian.iancuNo ratings yet
- A Short Introduction To CaretDocument10 pagesA Short Introduction To CaretblacngNo ratings yet
- OLS Regression Commands in RDocument38 pagesOLS Regression Commands in Rdeepak100% (1)
- Regression Linaire Python Tome IIDocument10 pagesRegression Linaire Python Tome IIElisée TEGUENo ratings yet
- 8 Ejercicio - Optimización y Guardado de Modelos - Training - Microsoft Learn InglesDocument13 pages8 Ejercicio - Optimización y Guardado de Modelos - Training - Microsoft Learn Inglesacxel david castillo casasNo ratings yet
- DSA Assignment 1Document8 pagesDSA Assignment 1Tendai ChigondoNo ratings yet
- Assignment 1:: Intro To Machine LearningDocument6 pagesAssignment 1:: Intro To Machine LearningMinh TríNo ratings yet
- Symbolic Genetic ProgrammingDocument8 pagesSymbolic Genetic ProgrammingvinhxuannNo ratings yet
- Deductive Database XujiaDocument10 pagesDeductive Database XujiaMoutusi PaulNo ratings yet
- Machine Learning Concepts for HealthcareDocument16 pagesMachine Learning Concepts for HealthcareRaj PhysioNo ratings yet
- Computational IntelligenceDocument12 pagesComputational Intelligenceబాలాజీ తరుణ్No ratings yet
- ML Coursera Python AssignmentsDocument20 pagesML Coursera Python AssignmentsMNo ratings yet
- Exercise 03 RadonovIvan 5967988Document1 pageExercise 03 RadonovIvan 5967988ErikaNo ratings yet
- ML0101EN Reg Mulitple Linear Regression Co2 Py v1Document5 pagesML0101EN Reg Mulitple Linear Regression Co2 Py v1Rajat SolankiNo ratings yet
- Logistic RegressionDocument30 pagesLogistic RegressionBharath100% (1)
- Understanding PyTorch with a step-by-step tutorialDocument20 pagesUnderstanding PyTorch with a step-by-step tutorialSandro Skansi GMAILNo ratings yet
- Machine Learning Random Forest Algorithm - JavatpointDocument14 pagesMachine Learning Random Forest Algorithm - JavatpointRAMZI AzeddineNo ratings yet
- First ReportDocument14 pagesFirst Reportdnthrtm3No ratings yet
- Machine Learning Lab Manual 06Document8 pagesMachine Learning Lab Manual 06Raheel Aslam100% (1)
- Machin e Learnin G: Lab Record Implementation in RDocument30 pagesMachin e Learnin G: Lab Record Implementation in RyukthaNo ratings yet
- 0.1 Guilherme Marthe - Boston House Pricing ChallengeDocument15 pages0.1 Guilherme Marthe - Boston House Pricing ChallengeGuilherme Marthe100% (1)
- # Assignment 4&5 (Combined) (Clustering & Dimension Reduction)Document15 pages# Assignment 4&5 (Combined) (Clustering & Dimension Reduction)raosahebNo ratings yet
- utf-8''C2M1 AssignmentDocument24 pagesutf-8''C2M1 AssignmentSarah MendesNo ratings yet
- Gradient Descent AlgorithmDocument5 pagesGradient Descent AlgorithmravinyseNo ratings yet
- Week 6 - Model Assumptions in Linear RegressionDocument17 pagesWeek 6 - Model Assumptions in Linear RegressionThanh Mai PhamNo ratings yet
- Control Design and Analysis of Closed-Loop Dynamic Response For Rectilinear Vibration SystemDocument15 pagesControl Design and Analysis of Closed-Loop Dynamic Response For Rectilinear Vibration SystemVinay Mishra100% (2)
- CSL0777 L15Document24 pagesCSL0777 L15Konkobo Ulrich ArthurNo ratings yet
- Infotec Ai 1000 Program-hcia-Ai Lab GuideDocument82 pagesInfotec Ai 1000 Program-hcia-Ai Lab Guidemicke juarezNo ratings yet
- FALL SEMESTER 2019-20 AI With Python: ECE4031 Digital Assignment - 1Document14 pagesFALL SEMESTER 2019-20 AI With Python: ECE4031 Digital Assignment - 1sejal mittalNo ratings yet
- Linear Reg GDDocument8 pagesLinear Reg GDGautam Kumar100% (1)
- B Ridge - and - Lasso - RegressionDocument5 pagesB Ridge - and - Lasso - RegressionGabriel GheorgheNo ratings yet
- 3 Types of Gradient Descent Algorithms For Small & Large DatasetsDocument9 pages3 Types of Gradient Descent Algorithms For Small & Large Datasetscontactcenter2 LiderNo ratings yet
- 2.1 ML (Implementation of Simple Linear Regression in Python)Document8 pages2.1 ML (Implementation of Simple Linear Regression in Python)Muhammad shayan umarNo ratings yet
- 20dit073 Jay Prajapati MLDocument68 pages20dit073 Jay Prajapati MLJay PrajapatiNo ratings yet
- Optimal Farming Algorithm Using Reinforcement LearningDocument4 pagesOptimal Farming Algorithm Using Reinforcement LearningDhivyaRajprasadNo ratings yet
- 5 Ejercicio - Experimentación Con Los Modelos de Regresión Más Eficaces - Training - Microsoft Learn InglesDocument9 pages5 Ejercicio - Experimentación Con Los Modelos de Regresión Más Eficaces - Training - Microsoft Learn Inglesacxel david castillo casasNo ratings yet
- Blog Time Series Analysis in Python Dmitriy SergeevDocument31 pagesBlog Time Series Analysis in Python Dmitriy SergeevPeter JanssenNo ratings yet
- Assignment 3_LP1Document13 pagesAssignment 3_LP1bbad070105No ratings yet
- TD2345Document3 pagesTD2345ashitaka667No ratings yet
- Assignment2Document13 pagesAssignment2Vasudha SinghNo ratings yet
- ML0101EN Reg Simple Linear Regression Co2 Py v1Document4 pagesML0101EN Reg Simple Linear Regression Co2 Py v1Muhammad RaflyNo ratings yet
- Training With Proximal Policy Optimization Training With Proximal Policy OptimizationDocument7 pagesTraining With Proximal Policy Optimization Training With Proximal Policy OptimizationCecille DevilleNo ratings yet
- Dimension ReductionDocument15 pagesDimension ReductionShreyas VaradkarNo ratings yet
- ML Property Price Model Using Gradient BoostingDocument10 pagesML Property Price Model Using Gradient Boostingsujeet_vaNo ratings yet
- Unit IiDocument8 pagesUnit Iinikhilsinha789No ratings yet
- CS 224n Assignment #3: Dependency Parsing: 1. Machine Learning & Neural Networks (8 Points)Document7 pagesCS 224n Assignment #3: Dependency Parsing: 1. Machine Learning & Neural Networks (8 Points)progisNo ratings yet
- Python Numerical Computing With NumpyDocument21 pagesPython Numerical Computing With NumpyLakshit ManraoNo ratings yet
- Assignment 2Document6 pagesAssignment 2raosahebNo ratings yet
- Machine LearningDocument56 pagesMachine LearningMani Vrs100% (3)
- TF Week 2 Lesson 3.ipynb - ColaboratoryDocument5 pagesTF Week 2 Lesson 3.ipynb - ColaboratoryFahim SaNo ratings yet
- Course 3 - Week 2 - Exercise - Answer - Ipynb - ColaboratoryDocument8 pagesCourse 3 - Week 2 - Exercise - Answer - Ipynb - ColaboratoryFahim SaNo ratings yet
- Part 2 - Kinds of RL Algorithms - Spinning Up DocumentationDocument5 pagesPart 2 - Kinds of RL Algorithms - Spinning Up DocumentationFahim SaNo ratings yet
- Calculus Cheat SheetDocument6 pagesCalculus Cheat SheetDino99% (75)
- Part 1 - Key Concepts in RL - Spinning Up DocumentationDocument9 pagesPart 1 - Key Concepts in RL - Spinning Up DocumentationFahim SaNo ratings yet
- Discrete Math - Mathematics For Computer ScienceDocument339 pagesDiscrete Math - Mathematics For Computer ScienceNungu Sungi100% (1)
- Top Coder All TutorialsDocument205 pagesTop Coder All TutorialsFahim SaNo ratings yet
- 1300 Math Formulas - Alex SvirinDocument338 pages1300 Math Formulas - Alex SvirinMirnesNo ratings yet
- Probability Answers PDFDocument87 pagesProbability Answers PDFFahim SaNo ratings yet
- Combinatorial Game TheoryDocument33 pagesCombinatorial Game TheoryGautam SinghNo ratings yet
- Mse 221 Final ReviewDocument8 pagesMse 221 Final ReviewnmfreedomNo ratings yet
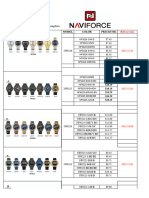
- NAVIFORCE Watch Catalogue in USD - Updated in 20240104Document47 pagesNAVIFORCE Watch Catalogue in USD - Updated in 20240104Perez PerezNo ratings yet
- Applied Mathematics Demo PDFDocument157 pagesApplied Mathematics Demo PDFAbhishek Kumar AmarNo ratings yet
- Novel Fiber Optic Biosensors Based On Nanoplasmonic and Interferometric ModalitiesDocument152 pagesNovel Fiber Optic Biosensors Based On Nanoplasmonic and Interferometric ModalitiesIan MuriNo ratings yet
- Beverage Density Lab: Sugar Content Analysis EN 5Document2 pagesBeverage Density Lab: Sugar Content Analysis EN 5Atmira Nurandarini UtomoNo ratings yet
- Abs Guidance Notes On Ice ClassDocument86 pagesAbs Guidance Notes On Ice ClassJonas Atta BoatengNo ratings yet
- HG Properties Table 2016 PDFDocument19 pagesHG Properties Table 2016 PDFMario LeonoNo ratings yet
- G Lake TravelliftDocument2 pagesG Lake TravelliftabdulanisNo ratings yet
- Diction Exercises For 'B' WordsDocument4 pagesDiction Exercises For 'B' WordsBianca ConstantinNo ratings yet
- RV-1 Flow DivDocument7 pagesRV-1 Flow Divturbo_kidNo ratings yet
- Fin f11Document16 pagesFin f11btittyNo ratings yet
- Work - Energy - PowerDocument9 pagesWork - Energy - PowermaryNo ratings yet
- DLL Mathematics-6 Q3 W6Document10 pagesDLL Mathematics-6 Q3 W6Sheryl Ilagan Del RosarioNo ratings yet
- Lecture 36 - Single Stage Amplifier: Design For Specific GainDocument11 pagesLecture 36 - Single Stage Amplifier: Design For Specific GainKhaleef Khairul AnuarNo ratings yet
- Explaining and Harnessing Adversarial ExamplesDocument3 pagesExplaining and Harnessing Adversarial ExamplesutkarshxNo ratings yet
- Introducing Decision Transformers On Hugging Face ?Document12 pagesIntroducing Decision Transformers On Hugging Face ?minfuelNo ratings yet
- Newtonian Studies - Alexandre KoyreDocument148 pagesNewtonian Studies - Alexandre Koyreaemerlo100% (3)
- 3 Stress AnalysisDocument22 pages3 Stress Analysisrd_mechNo ratings yet
- Semester I Semester - Iv Semester - Vii: Total 18 4 8 Total 24 28 30Document119 pagesSemester I Semester - Iv Semester - Vii: Total 18 4 8 Total 24 28 30John ShugerNo ratings yet
- Visual guide to basic 3D shapesDocument10 pagesVisual guide to basic 3D shapesBel JaNo ratings yet
- Euler Master Us All PDFDocument2 pagesEuler Master Us All PDFBenNo ratings yet
- Lesson 4.1 - Solving Systems by GraphingDocument14 pagesLesson 4.1 - Solving Systems by GraphingnanalagappanNo ratings yet
- 2001 0009v1 PDFDocument4 pages2001 0009v1 PDFNorris Lam100% (1)
- Quantitative Methods For Business 12Th Edition Anderson Solutions Manual Full Chapter PDFDocument65 pagesQuantitative Methods For Business 12Th Edition Anderson Solutions Manual Full Chapter PDFvernier.decyliclnn4100% (8)
- 24 - Practical Poker Math (Pat Dittmar)Document252 pages24 - Practical Poker Math (Pat Dittmar)Fabian CerdaNo ratings yet
- Module 1c Number Systems and PresentationDocument53 pagesModule 1c Number Systems and PresentationMairos Kunze BongaNo ratings yet
- Assembly Line BalancingDocument19 pagesAssembly Line BalancingMilan MeeraNo ratings yet
- JD Deutsche BankDocument1 pageJD Deutsche BankcompangelNo ratings yet
- Camm 4e Ch12 PPTDocument99 pagesCamm 4e Ch12 PPTMardonio AgustinNo ratings yet
- Circular Motion Lab For Physics 2016 SpringDocument1 pageCircular Motion Lab For Physics 2016 SpringIrwansyah Ramadhani100% (1)