You might also like
- Modeling of Complex Systems: Application to Aeronautical DynamicsFrom EverandModeling of Complex Systems: Application to Aeronautical DynamicsNo ratings yet
- 023 - Chapter 5 - L16 PDFDocument12 pages023 - Chapter 5 - L16 PDFKunhu MonuNo ratings yet
- 027 - Chapter 6 - L19 PDFDocument11 pages027 - Chapter 6 - L19 PDFashwaNo ratings yet
- Helicopter Flight Dynamics: Including a Treatment of Tiltrotor AircraftFrom EverandHelicopter Flight Dynamics: Including a Treatment of Tiltrotor AircraftNo ratings yet
- AULA - EstabilidadeDocument14 pagesAULA - Estabilidadelilibeth Suarez reyesNo ratings yet
- Mechanics: Problems in Undergraduate PhysicsFrom EverandMechanics: Problems in Undergraduate PhysicsRating: 3.5 out of 5 stars3.5/5 (2)
- 17ae73 - As&c Module-1 - ClassDocument72 pages17ae73 - As&c Module-1 - ClassSanjana ShivaprakashNo ratings yet
- Flight Mechanics/Dynamics: Dr. Shashi Ranjan KumarDocument32 pagesFlight Mechanics/Dynamics: Dr. Shashi Ranjan KumarsakshiNo ratings yet
- Missile Roll Autopilot OverviewDocument11 pagesMissile Roll Autopilot OverviewD.Viswanath100% (1)
- Stability DerivativesDocument9 pagesStability DerivativesvishwaNo ratings yet
- Aircraft StabilityDocument13 pagesAircraft Stabilitynanduslns07No ratings yet
- Estimating The Low-Speed Sidewash PDFDocument3 pagesEstimating The Low-Speed Sidewash PDFGabriel Rodrigues FelixNo ratings yet
- Lateral Stability DerivativesDocument5 pagesLateral Stability DerivativesCodenameairi AllyNo ratings yet
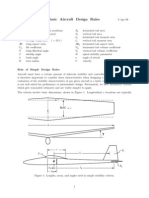
- Basic Aircraft Design RulesDocument8 pagesBasic Aircraft Design RulesAbdelrahman Nassif100% (1)
- Static Lateral Stability and ControlDocument25 pagesStatic Lateral Stability and Controlkon-baNo ratings yet
- Review of Propeller-Wing Aerodynamic InterferenceDocument21 pagesReview of Propeller-Wing Aerodynamic Interferencekrishnamoorthy_krishNo ratings yet
- Flat Earth ModelDocument11 pagesFlat Earth ModelversineNo ratings yet
- 17ae73 As&c Module-2 ClassDocument47 pages17ae73 As&c Module-2 ClassSanjana ShivaprakashNo ratings yet
- Steady Level Flight Performance AnalysisDocument11 pagesSteady Level Flight Performance Analysissamundra aryalNo ratings yet
- Aircraft Stability and ControlDocument14 pagesAircraft Stability and Controlkriscortez05100% (3)
- Boomerang TheoryDocument1 pageBoomerang TheoryAruna PrasadNo ratings yet
- F-16 Dynamic ModelDocument19 pagesF-16 Dynamic ModelMuhammad AbdullahNo ratings yet
- Aircraft StabilityDocument126 pagesAircraft StabilitymunirnadirNo ratings yet
- Longitudinal Stability and Control Effects of AccelerationDocument12 pagesLongitudinal Stability and Control Effects of Accelerationnanduslns07No ratings yet
- Chapter 5Document355 pagesChapter 5manikandan_murugaiah100% (4)
- Introduction - 3 Topics: Flight Dynamics - II Prof. E.G. Tulapurkara Stability and ControlDocument8 pagesIntroduction - 3 Topics: Flight Dynamics - II Prof. E.G. Tulapurkara Stability and Controlnanduslns07No ratings yet
- 021 - Chapter 4 - L15Document12 pages021 - Chapter 4 - L15kuldeepNo ratings yet
- Missile Control Part IDocument13 pagesMissile Control Part ID.Viswanath100% (2)
- Compressible and Finite Wing Aerodynamics: Naman BhattDocument3 pagesCompressible and Finite Wing Aerodynamics: Naman BhattHarjaapNo ratings yet
- Chapter 5 - IncompressibleFlowOver - FiniteWingDocument18 pagesChapter 5 - IncompressibleFlowOver - FiniteWingChristian NobertoNo ratings yet
- mae5070SampleQsDocument9 pagesmae5070SampleQsUroš MišmašNo ratings yet
- Missile Autopilot AerodynamicsDocument12 pagesMissile Autopilot AerodynamicsD.ViswanathNo ratings yet
- Keywords:: Performance Analysis II - Steady Climb, Descent and Glide (Lectures 21,22 and 23)Document12 pagesKeywords:: Performance Analysis II - Steady Climb, Descent and Glide (Lectures 21,22 and 23)Chegrani AhmedNo ratings yet
- Roll Stability and ControlDocument22 pagesRoll Stability and ControlMohammad Toseef AnwarNo ratings yet
- LoopdragDocument3 pagesLoopdragStefano De MartiniNo ratings yet
- Module IVDocument25 pagesModule IVVinay KashyapNo ratings yet
- Aerodynamic Analysis Using XFLR-5Document12 pagesAerodynamic Analysis Using XFLR-5Alejandro García González100% (1)
- LIFTING LINE THEORYDocument14 pagesLIFTING LINE THEORYhmalikn758150% (2)
- Longitudinal Static Stability and Control - Effect of AccelerationDocument12 pagesLongitudinal Static Stability and Control - Effect of Accelerationmoj33No ratings yet
- Empennage Sizing and Aircraft Stability Using MatlabDocument37 pagesEmpennage Sizing and Aircraft Stability Using MatlabRoxana VoicuNo ratings yet
- Aircraft Stability and Control - Lec02 PDFDocument12 pagesAircraft Stability and Control - Lec02 PDFHaidar HeroNo ratings yet
- The Calculation of The Spanwise Loading Sweptback Wings With Flaps or All-Moving Tips at Subsonic Speeds ofDocument43 pagesThe Calculation of The Spanwise Loading Sweptback Wings With Flaps or All-Moving Tips at Subsonic Speeds ofIbn e siddiqueNo ratings yet
- StabilityDocument70 pagesStabilityHari Manoj Ram GandrothuNo ratings yet
- 17AE73 - AS&C - M-3 - Rajasekar & Syed MohsinDocument137 pages17AE73 - AS&C - M-3 - Rajasekar & Syed MohsinSanjana ShivaprakashNo ratings yet
- Flight Mechanics/Dynamics: Dr. Shashi Ranjan KumarDocument22 pagesFlight Mechanics/Dynamics: Dr. Shashi Ranjan KumarsakshiNo ratings yet
- Aerodynamics 2 Simplified Horseshoe Vortex ModelDocument14 pagesAerodynamics 2 Simplified Horseshoe Vortex Modelanirudh pNo ratings yet
- ASC-mod 3-Static Directional Stability and ControlDocument16 pagesASC-mod 3-Static Directional Stability and ControlJason JeevanNo ratings yet
- Aircraft Stability and Control - Lec04Document14 pagesAircraft Stability and Control - Lec04Akeel AliNo ratings yet
- Chapter 9 Lecture 28 22-12-2011Document13 pagesChapter 9 Lecture 28 22-12-2011Anshul ManiNo ratings yet
- Calculation of The Longitudinal Stability DerivatiDocument7 pagesCalculation of The Longitudinal Stability DerivatittNo ratings yet
- Control Design of Fin Roll Stabilization in Beam Seas Based On Lyapunov's Direct MethodDocument6 pagesControl Design of Fin Roll Stabilization in Beam Seas Based On Lyapunov's Direct Methodمجتبی فرامرزیNo ratings yet
- Pressurised Cabin,: Landing On Water, : High Speed Manoeuvres, Withstand Considerable DamageDocument7 pagesPressurised Cabin,: Landing On Water, : High Speed Manoeuvres, Withstand Considerable DamageEng Saher MahmoudNo ratings yet
- 4 LateralDirectional#2BA14D 2Document16 pages4 LateralDirectional#2BA14D 2Sylvester ObaraNo ratings yet
- Flight DynamicsDocument12 pagesFlight Dynamicsthomasvictor2005No ratings yet
- Aerodynamic tail design cross-checksDocument7 pagesAerodynamic tail design cross-checksKunhu MonuNo ratings yet
- Aircraft Lateral Static StabilityDocument16 pagesAircraft Lateral Static StabilityMatthew AustinNo ratings yet
- Motivation Letter RPDocument2 pagesMotivation Letter RPRushikesh PatilNo ratings yet
- 024 - Chapter 5 - L17 PDFDocument13 pages024 - Chapter 5 - L17 PDFRushikesh PatilNo ratings yet
- Ae:Aerospace Engineering: General InstructionsDocument20 pagesAe:Aerospace Engineering: General InstructionsJosin JoseNo ratings yet
- Arduino Radar Source CodeDocument9 pagesArduino Radar Source CodeRushikesh PatilNo ratings yet
- 1HS17AE032 FS Lab-1 PDFDocument4 pages1HS17AE032 FS Lab-1 PDFRushikesh PatilNo ratings yet
- 1HS17AE032 FS Lab-1 PDFDocument4 pages1HS17AE032 FS Lab-1 PDFRushikesh PatilNo ratings yet
- GATE Aerospace 2015 Answers PDFDocument1 pageGATE Aerospace 2015 Answers PDFRushikesh PatilNo ratings yet
- Aeros KeyDocument1 pageAeros KeysureshjeevaNo ratings yet
- Mod 3 Engine PerformanceDocument55 pagesMod 3 Engine PerformanceRushikesh PatilNo ratings yet
- Mod 5 Engine TestingDocument73 pagesMod 5 Engine TestingRushikesh PatilNo ratings yet
- Mod 3 Engine PerformanceDocument55 pagesMod 3 Engine PerformanceRushikesh PatilNo ratings yet
- AE Engineering Mathematics, Aerodynamics, Structures & PropulsionDocument3 pagesAE Engineering Mathematics, Aerodynamics, Structures & PropulsionvenkatNo ratings yet
- GATE Aerospace 2015 Paper PDFDocument5 pagesGATE Aerospace 2015 Paper PDFRushikesh PatilNo ratings yet
- Mod 3 Engine PerformanceDocument55 pagesMod 3 Engine PerformanceRushikesh PatilNo ratings yet
- Crash Log 1Document18 pagesCrash Log 1Rushikesh PatilNo ratings yet
- Gas Turbine Engine Types, Parameters & ApplicationsDocument38 pagesGas Turbine Engine Types, Parameters & ApplicationsRushikesh PatilNo ratings yet
- Mod 1.2 Engine Parts GuideDocument67 pagesMod 1.2 Engine Parts GuideRushikesh PatilNo ratings yet
- Mod 2 Materials and ManufacturingDocument94 pagesMod 2 Materials and ManufacturingRushikesh PatilNo ratings yet
- Lec7 PDFDocument6 pagesLec7 PDFRushikesh PatilNo ratings yet
- RPO Appointment Reciept3647965Document3 pagesRPO Appointment Reciept3647965Rishi PatilNo ratings yet
- RPO Appointment Reciept3647965Document3 pagesRPO Appointment Reciept3647965Rishi PatilNo ratings yet
- EBOSDocument5 pagesEBOSKaptahNo ratings yet
- MODEL 550: Airplane Flight ManualDocument13 pagesMODEL 550: Airplane Flight ManualHugo GonzalezNo ratings yet
- SIM 2011A AirportsDocument62 pagesSIM 2011A AirportsbouldozasNo ratings yet
- Atr72 Flight InstrumentsDocument42 pagesAtr72 Flight InstrumentsJavier100% (3)
- SBBRSBSP PDF 1662915948Document24 pagesSBBRSBSP PDF 1662915948Gilberto FonsecaNo ratings yet
- Aerofooil PDFDocument79 pagesAerofooil PDFEva DewsburyNo ratings yet
- Airframe Stock ListDocument546 pagesAirframe Stock List2yp4sj97vcNo ratings yet
- 002 - Flight Control BasicDocument30 pages002 - Flight Control BasicAslamNo ratings yet
- 31 Indication System PDFDocument512 pages31 Indication System PDFBrayhan Alexander Palomino100% (1)
- Conceptual Design of Conventional and Oblique Wing Configurations For Small Supersonic AircraftDocument17 pagesConceptual Design of Conventional and Oblique Wing Configurations For Small Supersonic AircraftArturo PinedaNo ratings yet
- Garmin G1000 NXi Cockpit Reference Guide For The Diamond DA62Document174 pagesGarmin G1000 NXi Cockpit Reference Guide For The Diamond DA62André CatebNo ratings yet
- User Guide: Waco Ymf-5Document25 pagesUser Guide: Waco Ymf-5El Tio Del TamborNo ratings yet
- Eddfeddh PDF 1705003590Document31 pagesEddfeddh PDF 1705003590MisiexonNo ratings yet
- A400M PilotsGuide Uk PDFDocument13 pagesA400M PilotsGuide Uk PDFAntonio Tamairón GarcíaNo ratings yet
- Primus 1000 ExcelDocument298 pagesPrimus 1000 ExcelJerry Carstensen100% (2)
- Beech95 Expanded Checklist SelkirkDocument9 pagesBeech95 Expanded Checklist SelkirkRaph 1123No ratings yet
- PMDG 737ng FMC TutorialDocument16 pagesPMDG 737ng FMC Tutorialbcspike80% (5)
- Dissemetry of Lift Retreating Blade StallDocument8 pagesDissemetry of Lift Retreating Blade Stallzippiesdrainage100% (1)
- The Design and Construction of A BWB UAVDocument11 pagesThe Design and Construction of A BWB UAVPiee SyafieNo ratings yet
- UNIT 2-Basics AerodynamicsDocument23 pagesUNIT 2-Basics Aerodynamicspiravi66No ratings yet
- B737flyingtips PDFDocument8 pagesB737flyingtips PDFadonisshamlehNo ratings yet
- Aeronca Champ preflight checklistDocument2 pagesAeronca Champ preflight checklistIdiosocraticNo ratings yet
- A220 CockpitDocument1 pageA220 CockpitΤηλέμαχος ΧριστιάςNo ratings yet
- User Manual Garmin g1000 King Air 200 - b200 eDocument27 pagesUser Manual Garmin g1000 King Air 200 - b200 eDendito PratamaNo ratings yet
- Boeing 777 ChecklistDocument6 pagesBoeing 777 ChecklistawagnercsNo ratings yet
- Paul Jemitola Thesis 2012Document210 pagesPaul Jemitola Thesis 2012jcdt94No ratings yet
- Aircraft Stability and ControlDocument14 pagesAircraft Stability and Controlkriscortez05100% (3)
- A 320 Fault Verification GuideDocument36 pagesA 320 Fault Verification GuideMiklós Meixner100% (5)
- Design and Construction of A Novel Quad Tilt-Wing UAVDocument23 pagesDesign and Construction of A Novel Quad Tilt-Wing UAVKyle NhuNo ratings yet
- Equipment, Navigation and FacilitiesDocument9 pagesEquipment, Navigation and FacilitiesJuly TadeNo ratings yet
- The Innovators: How a Group of Hackers, Geniuses, and Geeks Created the Digital RevolutionFrom EverandThe Innovators: How a Group of Hackers, Geniuses, and Geeks Created the Digital RevolutionRating: 4.5 out of 5 stars4.5/5 (542)
- Off-Grid Projects: Step-by-Step Guide to Building Your Own Off-Grid SystemFrom EverandOff-Grid Projects: Step-by-Step Guide to Building Your Own Off-Grid SystemNo ratings yet
- 8051 Microcontroller: An Applications Based IntroductionFrom Everand8051 Microcontroller: An Applications Based IntroductionRating: 5 out of 5 stars5/5 (6)
- Practical Electrical Wiring: Residential, Farm, Commercial, and IndustrialFrom EverandPractical Electrical Wiring: Residential, Farm, Commercial, and IndustrialRating: 3.5 out of 5 stars3.5/5 (3)
- Practical Troubleshooting of Electrical Equipment and Control CircuitsFrom EverandPractical Troubleshooting of Electrical Equipment and Control CircuitsRating: 4 out of 5 stars4/5 (5)
- Upcycled Technology: Clever Projects You Can Do With Your Discarded Tech (Tech gift)From EverandUpcycled Technology: Clever Projects You Can Do With Your Discarded Tech (Tech gift)Rating: 4.5 out of 5 stars4.5/5 (2)
- 2022 Adobe® Premiere Pro Guide For Filmmakers and YouTubersFrom Everand2022 Adobe® Premiere Pro Guide For Filmmakers and YouTubersRating: 5 out of 5 stars5/5 (1)
- Practical Electronics for Inventors, Fourth EditionFrom EverandPractical Electronics for Inventors, Fourth EditionRating: 4 out of 5 stars4/5 (3)
- Ramblings of a Mad Scientist: 100 Ideas for a Stranger TomorrowFrom EverandRamblings of a Mad Scientist: 100 Ideas for a Stranger TomorrowNo ratings yet
- Lithium-Ion Battery: The Power of Electric Vehicles with Basics, Design, Charging technology & Battery Management SystemsFrom EverandLithium-Ion Battery: The Power of Electric Vehicles with Basics, Design, Charging technology & Battery Management SystemsRating: 5 out of 5 stars5/5 (2)
- The Fast Track to Your Technician Class Ham Radio License: For Exams July 1, 2022 - June 30, 2026From EverandThe Fast Track to Your Technician Class Ham Radio License: For Exams July 1, 2022 - June 30, 2026Rating: 5 out of 5 stars5/5 (1)
- Programming the Raspberry Pi, Third Edition: Getting Started with PythonFrom EverandProgramming the Raspberry Pi, Third Edition: Getting Started with PythonRating: 5 out of 5 stars5/5 (2)
- The Phone Fix: The Brain-Focused Guide to Building Healthy Digital Habits and Breaking Bad OnesFrom EverandThe Phone Fix: The Brain-Focused Guide to Building Healthy Digital Habits and Breaking Bad OnesRating: 5 out of 5 stars5/5 (1)
- The Rare Metals War: the dark side of clean energy and digital technologiesFrom EverandThe Rare Metals War: the dark side of clean energy and digital technologiesRating: 5 out of 5 stars5/5 (2)
- Conquering the Electron: The Geniuses, Visionaries, Egomaniacs, and Scoundrels Who Built Our Electronic AgeFrom EverandConquering the Electron: The Geniuses, Visionaries, Egomaniacs, and Scoundrels Who Built Our Electronic AgeRating: 5 out of 5 stars5/5 (8)
- Current Interruption Transients CalculationFrom EverandCurrent Interruption Transients CalculationRating: 4 out of 5 stars4/5 (1)
- The Graphene Revolution: The Weird Science of the Ultra-thinFrom EverandThe Graphene Revolution: The Weird Science of the Ultra-thinRating: 4.5 out of 5 stars4.5/5 (4)
- High Performance Loudspeakers: Optimising High Fidelity Loudspeaker SystemsFrom EverandHigh Performance Loudspeakers: Optimising High Fidelity Loudspeaker SystemsRating: 4 out of 5 stars4/5 (1)
- The Innovators: How a Group of Hackers, Geniuses, and Geeks Created the Digital RevolutionFrom EverandThe Innovators: How a Group of Hackers, Geniuses, and Geeks Created the Digital RevolutionRating: 4 out of 5 stars4/5 (331)
- Understanding Automotive Electronics: An Engineering PerspectiveFrom EverandUnderstanding Automotive Electronics: An Engineering PerspectiveRating: 3.5 out of 5 stars3.5/5 (16)