You might also like
- A New System of Alternating Current Motors and Transformers and Other EssaysFrom EverandA New System of Alternating Current Motors and Transformers and Other EssaysRating: 5 out of 5 stars5/5 (1)
- AC Motor: Electric Motor Alternating Current Stator Rotating Magnetic Field RotorDocument24 pagesAC Motor: Electric Motor Alternating Current Stator Rotating Magnetic Field RotorJagadeesh k v JagadeeshNo ratings yet
- AC MotorDocument71 pagesAC Motorstallone21No ratings yet
- AC Motor: Electric Motor Alternating Current Stator RotorDocument17 pagesAC Motor: Electric Motor Alternating Current Stator RotorAnonymous Clyy9NNo ratings yet
- AC motor operating principlesDocument10 pagesAC motor operating principlesLila CareyNo ratings yet
- Sensorlees SpeedDocument41 pagesSensorlees Speedvinay999100% (2)
- AC MotorDocument22 pagesAC MotorRavindar_Singh0% (1)
- AC MotorDocument22 pagesAC MotorMoise CristinaNo ratings yet
- Ac Motor WikiDocument12 pagesAc Motor WikiQendrim ZekaNo ratings yet
- AC Motor WikipediaDocument10 pagesAC Motor WikipediasmeenaNo ratings yet
- History: Electric Motor Alternating Current Stator RotorDocument14 pagesHistory: Electric Motor Alternating Current Stator RotorManas NagNo ratings yet
- Sensor Less Speed Control of IM Using VHDLDocument65 pagesSensor Less Speed Control of IM Using VHDLsajs2010% (1)
- Major Project Report: Submitted To: Submitted byDocument23 pagesMajor Project Report: Submitted To: Submitted byKaran KaulNo ratings yet
- History: AC Motor Electromagnetic Induction Slip Rings Commutators Slip-Ring AC Motors Polyphase FrictionDocument8 pagesHistory: AC Motor Electromagnetic Induction Slip Rings Commutators Slip-Ring AC Motors Polyphase FrictionegyptonNo ratings yet
- AlternatorDocument50 pagesAlternatorKR571No ratings yet
- Induction Motor: This Article Does NotDocument24 pagesInduction Motor: This Article Does Notyashraj786100% (1)
- Induction Motor: Citations VerificationDocument11 pagesInduction Motor: Citations VerificationChamika Dilshan WickramawardenaNo ratings yet
- AlternatorDocument8 pagesAlternatorBoreda RahulNo ratings yet
- Alternator Basics: How it Works to Charge a Car BatteryDocument8 pagesAlternator Basics: How it Works to Charge a Car BatteryAsif Al FaisalNo ratings yet
- Induction Machine TrainerDocument29 pagesInduction Machine TrainerBabyNo ratings yet
- Induction Motor - Wikipedia, The Free EncyclopediaDocument11 pagesInduction Motor - Wikipedia, The Free Encyclopediaak_thimiriNo ratings yet
- Induction Motor Basics - How They WorkDocument8 pagesInduction Motor Basics - How They WorkNaveen KumarNo ratings yet
- Induction MotorDocument14 pagesInduction Motorhamba0007No ratings yet
- Induction MotorDocument11 pagesInduction MotorMsKarolyNo ratings yet
- Mr. Mohanbir Singh: TopicDocument6 pagesMr. Mohanbir Singh: TopicGagan BoparaiNo ratings yet
- Induction Motor: Navigation SearchDocument8 pagesInduction Motor: Navigation SearchSoni Mishra TiwariNo ratings yet
- Induction Motor: Navigation Search Editing ItDocument12 pagesInduction Motor: Navigation Search Editing Itbspr282No ratings yet
- Pages From Electrical Insulation For Rotating Machines - Design, Evaluation, Aging, Testing, and Repair-6Document6 pagesPages From Electrical Insulation For Rotating Machines - Design, Evaluation, Aging, Testing, and Repair-6Muhammad AsimNo ratings yet
- Induction MotorDocument20 pagesInduction MotorMahêshwär Rêððý BobbaNo ratings yet
- 3phase Induction Motor (Sukhpreet)Document17 pages3phase Induction Motor (Sukhpreet)Ankesh KunwarNo ratings yet
- AC Motor: From Wikipedia, The Free EncyclopediaDocument9 pagesAC Motor: From Wikipedia, The Free EncyclopediaiimtpawanNo ratings yet
- Induction Motor: From Wikipedia, The Free EncyclopediaDocument7 pagesInduction Motor: From Wikipedia, The Free Encyclopediaadhikari_pradeepNo ratings yet
- Ac MotorsDocument17 pagesAc MotorsPineappleJamNo ratings yet
- Induction Motor: From Wikipedia, The Free EncyclopediaDocument6 pagesInduction Motor: From Wikipedia, The Free EncyclopediaJose EvonneNo ratings yet
- Assignment 6 VincoyDocument16 pagesAssignment 6 VincoyVincoy JohnlloydNo ratings yet
- RameshDocument12 pagesRameshKurapati Siddarth100% (1)
- AC MotorDocument18 pagesAC MotorCathy IsraelNo ratings yet
- Rotating Magnetic Field Induces Current in RotorDocument114 pagesRotating Magnetic Field Induces Current in RotorNesarkiran BagadeNo ratings yet
- VVVF DrivesDocument16 pagesVVVF DrivesIsradani MjNo ratings yet
- 3-Phase IMDocument16 pages3-Phase IMk rajendraNo ratings yet
- AlernatorDocument47 pagesAlernatorMayank SrivastavaNo ratings yet
- Skip To ContentDocument17 pagesSkip To Contentkidanemariam teseraNo ratings yet
- Altena TorDocument8 pagesAltena TorJb EnarioNo ratings yet
- Ac Electrical Machines: Provided by Pn. Zuraidah BT Ali Mech. Eng. Dept. PUODocument21 pagesAc Electrical Machines: Provided by Pn. Zuraidah BT Ali Mech. Eng. Dept. PUOMuhd AkmalNo ratings yet
- Electrical Drives: Content 1. 2. 3. 4. 5. 6. 7. 8. 9Document48 pagesElectrical Drives: Content 1. 2. 3. 4. 5. 6. 7. 8. 9TadeleHaileNo ratings yet
- EES (Lec20)Document16 pagesEES (Lec20)Muhammad SagheerNo ratings yet
- Motor Fundamentals PDFDocument12 pagesMotor Fundamentals PDFrajeshpalla4uNo ratings yet
- EE2403 - Special Electrical Machines Questions and AnswersDocument15 pagesEE2403 - Special Electrical Machines Questions and AnswerskesavantNo ratings yet
- Single Phase MotorDocument32 pagesSingle Phase MotorsnzaimahNo ratings yet
- Triangle Multi Drill HolderDocument43 pagesTriangle Multi Drill HolderSendhilNathan100% (1)
- Single PhasingDocument22 pagesSingle PhasingAakarsh Rastogi100% (2)
- Electrical MotorDocument23 pagesElectrical MotorAnik73% (11)
- Study of a reluctance magnetic gearbox for energy storage system applicationFrom EverandStudy of a reluctance magnetic gearbox for energy storage system applicationRating: 1 out of 5 stars1/5 (1)
- Electrical Machines: Lecture Notes for Electrical Machines CourseFrom EverandElectrical Machines: Lecture Notes for Electrical Machines CourseNo ratings yet
- Home-made Toy Motors: A practical handbook giving detailed instructions for building simple but operative electric motorsFrom EverandHome-made Toy Motors: A practical handbook giving detailed instructions for building simple but operative electric motorsNo ratings yet
- A New System of Alternating Current Motors and TransformersFrom EverandA New System of Alternating Current Motors and TransformersRating: 1 out of 5 stars1/5 (1)
- Small Dynamos and How to Make Them - Practical Instruction on Building a Variety of Machines Including Electric MotorsFrom EverandSmall Dynamos and How to Make Them - Practical Instruction on Building a Variety of Machines Including Electric MotorsNo ratings yet
- Power Electronics Applied to Industrial Systems and Transports, Volume 2: Power Converters and their ControlFrom EverandPower Electronics Applied to Industrial Systems and Transports, Volume 2: Power Converters and their ControlRating: 5 out of 5 stars5/5 (1)
- My ComputerDocument6 pagesMy ComputerArzuman HəsənovNo ratings yet
- Binary SearchDocument2 pagesBinary SearchArzuman HəsənovNo ratings yet
- A Day in LibraryDocument1 pageA Day in LibraryArzuman HəsənovNo ratings yet
- Interpolation Search Is An Improvement Over Binary SearchDocument1 pageInterpolation Search Is An Improvement Over Binary SearchArzuman HəsənovNo ratings yet
- Interpolation Search Is An Improvement Over Binary SearchDocument1 pageInterpolation Search Is An Improvement Over Binary SearchArzuman HəsənovNo ratings yet
- Interpolation Search Is An Improvement Over Binary SearchDocument1 pageInterpolation Search Is An Improvement Over Binary SearchArzuman HəsənovNo ratings yet
- Interpolation Search Is An Improvement Over Binary SearchDocument1 pageInterpolation Search Is An Improvement Over Binary SearchArzuman HəsənovNo ratings yet
- Asoiu: Sherlock andDocument24 pagesAsoiu: Sherlock andArzuman HəsənovNo ratings yet
- Interpolation Search Is An Improvement Over Binary SearchDocument1 pageInterpolation Search Is An Improvement Over Binary SearchArzuman HəsənovNo ratings yet
- Interpolation Search Is An Improvement Over Binary SearchDocument1 pageInterpolation Search Is An Improvement Over Binary SearchArzuman HəsənovNo ratings yet
- Ryans IT Limited Kusholi Bhaban, 238/1 Begum Rokeya Sarani, Taltola, Dhaka-1207, Bangladesh, +8809604442121, +8801755662121 info@ryansplus.comDocument2 pagesRyans IT Limited Kusholi Bhaban, 238/1 Begum Rokeya Sarani, Taltola, Dhaka-1207, Bangladesh, +8809604442121, +8801755662121 info@ryansplus.comshaonNo ratings yet
- The Effects of DC Machine Adjustment On Loop Balance - Jun 08Document91 pagesThe Effects of DC Machine Adjustment On Loop Balance - Jun 08Rohan ArthurNo ratings yet
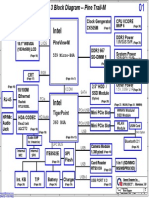
- Lenovo Ideapad S10-3 Schematic - Quanta Mariana 3.0 Pine Trail-M Schematic - FL5 Motherboard PDFDocument40 pagesLenovo Ideapad S10-3 Schematic - Quanta Mariana 3.0 Pine Trail-M Schematic - FL5 Motherboard PDFachyouth50% (2)
- Ann 4 A Wl1000 Odu He f58 Ida ExtDocument2 pagesAnn 4 A Wl1000 Odu He f58 Ida Extsyrish2622No ratings yet
- Img 0002Document16 pagesImg 0002Pournamy RameezNo ratings yet
- M-GEAR: Gateway-Based Energy-Aware Multi-Hop Routing ProtocolDocument17 pagesM-GEAR: Gateway-Based Energy-Aware Multi-Hop Routing ProtocolNanaji UppeNo ratings yet
- Valve SubstituciónDocument100 pagesValve SubstituciónJorge Luis Santana GarciaNo ratings yet
- Simulation Set 2Document4 pagesSimulation Set 2Harsh ThakurNo ratings yet
- Form 1.1 Self AssessmentDocument4 pagesForm 1.1 Self AssessmentIct GothongNo ratings yet
- TeleCARE IP Product CatalogDocument6 pagesTeleCARE IP Product CatalogRenzo PastorNo ratings yet
- ELE3IES Assignment 1 2012Document3 pagesELE3IES Assignment 1 2012Thieu LamNo ratings yet
- Planning of Optimal Power SystemsDocument9 pagesPlanning of Optimal Power Systemsaliscribd46No ratings yet
- Ua 723Document21 pagesUa 723roozbehxoxNo ratings yet
- Distributed SPCDocument106 pagesDistributed SPCKamal Singh RathoreNo ratings yet
- LG Split Lsa3cg2af8Document48 pagesLG Split Lsa3cg2af8kaukabNo ratings yet
- M High Efficiency Horizontal Multistage Pump: E-Hm™ SeriesDocument3 pagesM High Efficiency Horizontal Multistage Pump: E-Hm™ Seriesgolivares17No ratings yet
- Protect Ringmaster systems with the VIP 300 relayDocument19 pagesProtect Ringmaster systems with the VIP 300 relaymuhamed MuneerNo ratings yet
- Mohamed Abd Elwahab Ali - Lecture 07. Short Circuit Calculations PDFDocument8 pagesMohamed Abd Elwahab Ali - Lecture 07. Short Circuit Calculations PDFadam tamimNo ratings yet
- Evolution of Modern Wireless Communication Systems & NetworksDocument19 pagesEvolution of Modern Wireless Communication Systems & NetworksSumeet S. KangNo ratings yet
- STLDDocument1 pageSTLDdasari_reddy100% (1)
- ITU-R Recommendations and Reports ListDocument78 pagesITU-R Recommendations and Reports ListRismal Ray VaughanNo ratings yet
- LightSYS System Architecture PDFDocument1 pageLightSYS System Architecture PDFLuis CastilloNo ratings yet
- 0716 - DHPV2 - ESF - 400KV GIS - Routine Test Report For CB-New Pole C14-Q0.BDocument12 pages0716 - DHPV2 - ESF - 400KV GIS - Routine Test Report For CB-New Pole C14-Q0.BadnanNo ratings yet
- 8051 Interfacing Guide for External DevicesDocument32 pages8051 Interfacing Guide for External DevicesSrikar NamburuNo ratings yet
- Programmable PLL Frequency Synthesizer IC SM5160CM/DMDocument7 pagesProgrammable PLL Frequency Synthesizer IC SM5160CM/DMLucas Gabriel CasagrandeNo ratings yet
- 2 Mbit / 3 Mbit / 4 Mbit LPC Firmware Flash: SST49LF002B / SST49LF003B / SST49LF004BDocument43 pages2 Mbit / 3 Mbit / 4 Mbit LPC Firmware Flash: SST49LF002B / SST49LF003B / SST49LF004BPayKa PastoryRiosNo ratings yet
- RSLogix 5000 Report(s) 120511Document74 pagesRSLogix 5000 Report(s) 120511Renji JacobNo ratings yet
- PDF d7024 Manual EspañolDocument80 pagesPDF d7024 Manual EspañolCésar JcNo ratings yet
- Cisco 400G Base QSFP - DatasheetDocument6 pagesCisco 400G Base QSFP - DatasheetMD. SHEFAUL KARIMNo ratings yet
- CAT Manual Raptor Woodward 26090BDocument40 pagesCAT Manual Raptor Woodward 26090BManuel Liñeiro90% (10)