You might also like
- Solution Manual for The Elements of Polymer Science and EngineeringFrom EverandSolution Manual for The Elements of Polymer Science and EngineeringRating: 4 out of 5 stars4/5 (3)
- PHP COURSE: Learn PHP Programming from ScratchDocument67 pagesPHP COURSE: Learn PHP Programming from ScratchSagar SikchiNo ratings yet
- Response to Arbitrary ForcesDocument33 pagesResponse to Arbitrary Forcespattrapong pongpattraNo ratings yet
- Free Vibration: Chopra: Prentice-Hall PAGES JUL. 19, 2000 14:25 ICC Oregon (503) 221-9911Document46 pagesFree Vibration: Chopra: Prentice-Hall PAGES JUL. 19, 2000 14:25 ICC Oregon (503) 221-9911MakaraSoyNo ratings yet
- Inverse kinematics elbow manipulatorDocument47 pagesInverse kinematics elbow manipulatorThảo DươngNo ratings yet
- Motion in Two Dimensions - Miscellaneous SolutionsDocument12 pagesMotion in Two Dimensions - Miscellaneous SolutionsJee AspirantNo ratings yet
- Microsoft Word - MA3004 - Tutorial 5 (FEM) Solutions - AY2022-23Document15 pagesMicrosoft Word - MA3004 - Tutorial 5 (FEM) Solutions - AY2022-23Luna OpalNo ratings yet
- Teoría de Mecanismos Tema 3. VibracionesDocument18 pagesTeoría de Mecanismos Tema 3. VibracionestxabiNo ratings yet
- Chapter 5 FrenchDocument70 pagesChapter 5 FrenchVaibhav SharmaNo ratings yet
- Clarke Transform - Open ElectricalDocument6 pagesClarke Transform - Open ElectricalMayita ContrerasNo ratings yet
- State Variable Analysis: Birla Vishwakarma MahavidyalayaDocument17 pagesState Variable Analysis: Birla Vishwakarma Mahavidyalayavani100% (1)
- Bảng BD F.RDocument1 pageBảng BD F.Rpro2212No ratings yet
- Vibración libre: -: a o o a a εωtDocument2 pagesVibración libre: -: a o o a a εωtluisito casorlaNo ratings yet
- Vibración libre: -: a o o a a εωtDocument2 pagesVibración libre: -: a o o a a εωtAnonymous IZAr1oNo ratings yet
- Teoría de Mecanismos Tema 3. VibracionesDocument37 pagesTeoría de Mecanismos Tema 3. VibracionestxabiNo ratings yet
- Formulas and definitions of the Laplace transformDocument1 pageFormulas and definitions of the Laplace transformAnthony E. LqNo ratings yet
- Toturial 1 Haibo Faradays LawDocument4 pagesToturial 1 Haibo Faradays LawShoaib Ur RehmanNo ratings yet
- CBSE Class 10 Maths Solutions: Expected Answers/Value Points Section - ADocument10 pagesCBSE Class 10 Maths Solutions: Expected Answers/Value Points Section - ABharat JangidNo ratings yet
- Day 24 Math24 (Differential Equations) : CH 3.8 Forced Vibrations (Page 207-221)Document20 pagesDay 24 Math24 (Differential Equations) : CH 3.8 Forced Vibrations (Page 207-221)Glenn Christian SiosonNo ratings yet
- 2 - Analog Communication Technique - AM ModulatorsDocument5 pages2 - Analog Communication Technique - AM ModulatorsasdqwNo ratings yet
- DISU231/EECE231 Basic Circuit Theory Homework 5: Fall Semester 2023Document2 pagesDISU231/EECE231 Basic Circuit Theory Homework 5: Fall Semester 2023이주영No ratings yet
- Lattice Vibrations, Part I: Solid State Physics 355Document22 pagesLattice Vibrations, Part I: Solid State Physics 355Anonymous 9rJe2lOskxNo ratings yet
- SEISMIC SIMULATIONDocument20 pagesSEISMIC SIMULATIONRory Cristian Cordero RojoNo ratings yet
- Homework 5 RoboticsDocument3 pagesHomework 5 RoboticsBrunoNo ratings yet
- Differential Equation of The Mechanical OscillatorDocument8 pagesDifferential Equation of The Mechanical OscillatorRajeshNo ratings yet
- Free Vibration of Single Degree of Freedom (SDOF)Document107 pagesFree Vibration of Single Degree of Freedom (SDOF)Mahesh LohanoNo ratings yet
- System TheoryDocument17 pagesSystem TheoryMichael CampbellNo ratings yet
- JEE & NEET Level 9 SHM Practice TestDocument6 pagesJEE & NEET Level 9 SHM Practice TestGreat DeclamationsNo ratings yet
- Adobe Scan 15 Sep 2020Document8 pagesAdobe Scan 15 Sep 2020Shyam Sundar JanaNo ratings yet
- 02 - Dynamics2StatiscDocument24 pages02 - Dynamics2StatiscJonathan MarioNo ratings yet
- M475 - c2 - L9 - Discrete Time DesignDocument4 pagesM475 - c2 - L9 - Discrete Time DesignAli AlmakhmariNo ratings yet
- Solved Problems-2Document21 pagesSolved Problems-2erkas2000No ratings yet
- Physics Homework 0-4: Name: Graciella Fabiona Turangan (菲奥娜) STUDENT ID: 10460348771 Major: Mechanical EngineeringDocument3 pagesPhysics Homework 0-4: Name: Graciella Fabiona Turangan (菲奥娜) STUDENT ID: 10460348771 Major: Mechanical Engineeringrifky shawnNo ratings yet
- CurvesDocument61 pagesCurvesRajesh RockyNo ratings yet
- 27.3.8 - Forced VibrationsDocument32 pages27.3.8 - Forced VibrationskumiristineNo ratings yet
- 2 Link Planar ManipulatorDocument15 pages2 Link Planar ManipulatoryogNo ratings yet
- Phy 582: Modern Physics IDocument22 pagesPhy 582: Modern Physics ISyafiqah ArinaNo ratings yet
- Boyce/Diprima 10 Ed, CH 3.8: Forced VibrationsDocument29 pagesBoyce/Diprima 10 Ed, CH 3.8: Forced VibrationsphakphumNo ratings yet
- Chapter 3 SolutionsDocument18 pagesChapter 3 SolutionsMichaelNo ratings yet
- Documents - Pub - Lattice Vibrations Part I Solid State Physics 355Document22 pagesDocuments - Pub - Lattice Vibrations Part I Solid State Physics 355algeboriNo ratings yet
- Analog Communication AM ModulatorsDocument3 pagesAnalog Communication AM ModulatorsGOHIL AJAYKUMAR SHANKARBHAINo ratings yet
- Fiitjee: All India Test SeriesDocument13 pagesFiitjee: All India Test SeriesChandrima Dola MukherjeeNo ratings yet
- Schematic Diagram of Centrifugal Compressor: Euler's Equation For Energy TransferDocument3 pagesSchematic Diagram of Centrifugal Compressor: Euler's Equation For Energy TransferMallepalli YadaiahNo ratings yet
- Integral GarisDocument13 pagesIntegral GarisrakhaaditNo ratings yet
- Exercise C2 Earthquake Analysis Using FEM: Authors: Submitted (Date) : 2019-10-6 Approved by (Name/date)Document7 pagesExercise C2 Earthquake Analysis Using FEM: Authors: Submitted (Date) : 2019-10-6 Approved by (Name/date)xiaoqi wangNo ratings yet
- 2005 Paper Solutions To q1q2q3Document5 pages2005 Paper Solutions To q1q2q3Iman SatriaNo ratings yet
- P - Ch-01 - Motion in A Straight LineDocument4 pagesP - Ch-01 - Motion in A Straight LineNikhil KumarNo ratings yet
- 06 2second OrderDocument19 pages06 2second Ordermiftahul hasanNo ratings yet
- ESC201T L11 RLC CircuitsDocument31 pagesESC201T L11 RLC CircuitsRachit MahajanNo ratings yet
- 2.2 The Michelson-Morley Experiment 1Document7 pages2.2 The Michelson-Morley Experiment 1Yuvraj KiskuNo ratings yet
- June 29 2022 Jee Main Shift 2 Physics SolutionDocument7 pagesJune 29 2022 Jee Main Shift 2 Physics SolutionPiyush kumarNo ratings yet
- Signal and SystemsDocument83 pagesSignal and SystemszecelecNo ratings yet
- Convection Integral MethodDocument5 pagesConvection Integral MethodMazen AiNo ratings yet
- EE-232 Signals & Systems: Fourier Series & Fourier TransformsDocument17 pagesEE-232 Signals & Systems: Fourier Series & Fourier TransformsHaris AsifNo ratings yet
- AITS 2021 CRT I JEEM SolDocument20 pagesAITS 2021 CRT I JEEM SolrickNo ratings yet
- z5 ElectromagneticInduction2Document7 pagesz5 ElectromagneticInduction2Gan PentonNo ratings yet
- Calculo Iii Tabela Transformada de Laplace PDFDocument1 pageCalculo Iii Tabela Transformada de Laplace PDFCaio Felipe CarvalhoNo ratings yet
- Fiitjee All India Test Series: Concept Recapitulation Test - IvDocument14 pagesFiitjee All India Test Series: Concept Recapitulation Test - IvItsecret NameNo ratings yet
- Laplace TransformDocument4 pagesLaplace TransformNing XiNo ratings yet
- Analog Communication DSBSC Modulators TutorialDocument3 pagesAnalog Communication DSBSC Modulators TutorialkhalidNo ratings yet
- 12장솔루션Document248 pages12장솔루션김규리No ratings yet
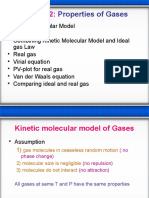
- Teori Kinetika Gas N Gas Real Video 2Document36 pagesTeori Kinetika Gas N Gas Real Video 2FaiqNo ratings yet
- Port Structures-198390-16376325723147Document81 pagesPort Structures-198390-16376325723147pattrapong pongpattraNo ratings yet
- Bridge - Example 198390 16372012818569Document60 pagesBridge - Example 198390 16372012818569pattrapong pongpattraNo ratings yet
- Seismic design of bridgeDocument6 pagesSeismic design of bridgepattrapong pongpattraNo ratings yet
- Earthquake Response of Inelastic Systems: Expected OutcomeDocument25 pagesEarthquake Response of Inelastic Systems: Expected Outcomepattrapong pongpattraNo ratings yet
- Fixity Point-198390-16346098400266Document9 pagesFixity Point-198390-16346098400266pattrapong pongpattraNo ratings yet
- Numerical Methods for Dynamic ResponseDocument21 pagesNumerical Methods for Dynamic Responsepattrapong pongpattraNo ratings yet
- Equations of Motion for Multi-Degree SystemsDocument31 pagesEquations of Motion for Multi-Degree Systemspattrapong pongpattraNo ratings yet
- RC Columns-198390-16357364023032Document18 pagesRC Columns-198390-16357364023032pattrapong pongpattraNo ratings yet
- Dynamic Analysis and Response of Linear MDF Systems: Expected OutcomeDocument19 pagesDynamic Analysis and Response of Linear MDF Systems: Expected Outcomepattrapong pongpattraNo ratings yet
- Free Vibration of SDF SystemsDocument14 pagesFree Vibration of SDF Systemspattrapong pongpattraNo ratings yet
- Vertical Shortening in ColumnsDocument38 pagesVertical Shortening in Columnsardikurniawan100% (2)
- Figure 1.1 Distributed-Mass Models Figure 1.2 Lumped-Mass ModelsDocument13 pagesFigure 1.1 Distributed-Mass Models Figure 1.2 Lumped-Mass Modelspattrapong pongpattraNo ratings yet
- Earthquake Response of Linear Systems: Expected OutcomeDocument30 pagesEarthquake Response of Linear Systems: Expected Outcomepattrapong pongpattraNo ratings yet
- CHAPTER 03-20200827-v8Document28 pagesCHAPTER 03-20200827-v8pattrapong pongpattraNo ratings yet
- Presentation3 20 Stress.15290.1598880173.9246Document37 pagesPresentation3 20 Stress.15290.1598880173.9246pattrapong pongpattraNo ratings yet
- Presentation2 20 Math.15290.1597313300.6643Document60 pagesPresentation2 20 Math.15290.1597313300.6643pattrapong pongpattraNo ratings yet
- Structural Design of High Rise BuildingsDocument142 pagesStructural Design of High Rise BuildingsOscar Zúñiga Cuevas100% (1)
- Chula Engineering Chapter on Concrete PropertiesDocument70 pagesChula Engineering Chapter on Concrete Propertiespattrapong pongpattraNo ratings yet
- Behavior and Analysis of Reinforced Concrete BeamsDocument79 pagesBehavior and Analysis of Reinforced Concrete Beamspattrapong pongpattraNo ratings yet
- Modeling Cracked Behavior of Shear Walls in ETABSDocument2 pagesModeling Cracked Behavior of Shear Walls in ETABSjadlouis100% (3)
- Tension Members Design ConceptsDocument15 pagesTension Members Design Conceptspattrapong pongpattraNo ratings yet
- 3 Tension Members Examples.14914.1504494731.4184Document14 pages3 Tension Members Examples.14914.1504494731.4184pattrapong pongpattraNo ratings yet
- Linear Algebra FundamentalsDocument94 pagesLinear Algebra Fundamentalspattrapong pongpattraNo ratings yet
- 1 Intro To Steel Design.14914.1504494667.2341Document27 pages1 Intro To Steel Design.14914.1504494667.2341pattrapong pongpattraNo ratings yet
- 112 EawdawdDocument1 page112 Eawdawdpattrapong pongpattraNo ratings yet
- Introduction To Qualitative Research MethodsDocument8 pagesIntroduction To Qualitative Research MethodsBast JordNo ratings yet
- MEITRACK - MVT600-User-Guide-V2.0 Sensor de Combustible ResistenciaDocument22 pagesMEITRACK - MVT600-User-Guide-V2.0 Sensor de Combustible ResistenciaManuel Flores CorderoNo ratings yet
- 01 03 01 Coolant TR0199 99 2091 enDocument18 pages01 03 01 Coolant TR0199 99 2091 enNelliNo ratings yet
- S7 Communication Between SIMATIC S7-1500 and SIMATIC S7-300: Step 7 V16 / Bsend / BRCVDocument45 pagesS7 Communication Between SIMATIC S7-1500 and SIMATIC S7-300: Step 7 V16 / Bsend / BRCV9226355166No ratings yet
- Reimagining Retail Commerce in A New Normal World 2023Document16 pagesReimagining Retail Commerce in A New Normal World 2023Beatriz Ochoa RamirezNo ratings yet
- Resume Ivan O.SDocument1 pageResume Ivan O.SsasNo ratings yet
- Faraz CV EnglishDocument2 pagesFaraz CV EnglishArbabNo ratings yet
- Plate Heat ExchangerDocument12 pagesPlate Heat ExchangerEngSafwanQadousNo ratings yet
- S1 Hyd Thrust T+answersDocument22 pagesS1 Hyd Thrust T+answersprabathiyaNo ratings yet
- User-Manual-1587358 Tenda W303Document66 pagesUser-Manual-1587358 Tenda W303wasiuddinNo ratings yet
- EBS 122 Cum RCD FINDocument121 pagesEBS 122 Cum RCD FINJulio FerrazNo ratings yet
- MFPS-JHD-P-SIE9-096: Product ClassificationDocument3 pagesMFPS-JHD-P-SIE9-096: Product Classificationhotrokythuat SNTekNo ratings yet
- Release 445 Driver For Windows, Version 445.87Document39 pagesRelease 445 Driver For Windows, Version 445.87Abid ArifNo ratings yet
- EBS 122 Cum RCD HCMDocument187 pagesEBS 122 Cum RCD HCMmohammed akbar aliNo ratings yet
- Honda Motor Co., Ltd. releases new parts catalogue for FS150FJ models in MalaysiaDocument17 pagesHonda Motor Co., Ltd. releases new parts catalogue for FS150FJ models in MalaysiaJimanx Haziman100% (1)
- Faculty of Engineering, UNIMASDocument4 pagesFaculty of Engineering, UNIMASjohnNo ratings yet
- Snorkel TB80 1997-05Document304 pagesSnorkel TB80 1997-05Lucho AlencastroNo ratings yet
- Multi-Area Complete Coverage With Fixed-Wing UAV Swarms Based On Modified Ant Colony AlgorithmDocument6 pagesMulti-Area Complete Coverage With Fixed-Wing UAV Swarms Based On Modified Ant Colony AlgorithmNithish ChandraNo ratings yet
- 2106 Industry Placement Briefing - StudentDocument29 pages2106 Industry Placement Briefing - StudentArsalan JahaniNo ratings yet
- Final AssignmentDocument4 pagesFinal AssignmentAssignment HandleNo ratings yet
- SCTE Fluid Mechanics GuideDocument127 pagesSCTE Fluid Mechanics GuideAbhishek MishraNo ratings yet
- NURS FPX 6612 Assessment 2 Quality Improvement ProposalDocument6 pagesNURS FPX 6612 Assessment 2 Quality Improvement Proposalzadem5266No ratings yet
- Rcd/Loop Tester: User'S ManualDocument8 pagesRcd/Loop Tester: User'S ManualGgggil GgggilNo ratings yet
- Lelon RGADocument5 pagesLelon RGAAnonymous xvd6YfftNo ratings yet
- EmpgDocument10 pagesEmpgShravanNo ratings yet
- 121 - NEXEN, Assembly Mag, Ballscrew Art-1Document4 pages121 - NEXEN, Assembly Mag, Ballscrew Art-1wilderness_666No ratings yet
- Globalization's growing webDocument3 pagesGlobalization's growing webVince Allen B. FerancoNo ratings yet
- QuotesDocument2 pagesQuotesKaal MaleNo ratings yet
- Covid 19 ImpactDocument38 pagesCovid 19 ImpactNavneet NandaNo ratings yet