You might also like
- Solutions Manual For Fundamentals of Ele PDFDocument20 pagesSolutions Manual For Fundamentals of Ele PDFCorona Virus0% (2)
- Domestication of Animals Lesson PlanDocument4 pagesDomestication of Animals Lesson Planapi-315606744No ratings yet
- ST Microelectronics Interview QuestionsDocument4 pagesST Microelectronics Interview QuestionsManish DahiyaNo ratings yet
- Parametric Linear Programming-1Document13 pagesParametric Linear Programming-1Ajay Kumar Agarwal100% (1)
- Ivy R Final AssessmentDocument10 pagesIvy R Final AssessmentSagnik MukherjeeNo ratings yet
- Logic Exam - Bank Questions - Assuit UniversityDocument10 pagesLogic Exam - Bank Questions - Assuit Universityعبدالرحمن العجانNo ratings yet
- Identify The Structure Implemented in The Following Layout Diagram and Draw Its Equivalent CMOS ImplementationDocument2 pagesIdentify The Structure Implemented in The Following Layout Diagram and Draw Its Equivalent CMOS Implementationrishika chhibberNo ratings yet
- The Teacher and The School Curriculun Chapter 1Document13 pagesThe Teacher and The School Curriculun Chapter 1jesvilla50% (2)
- Lesson Plan 2 - ZootopiaDocument4 pagesLesson Plan 2 - Zootopiaapi-340179940100% (1)
- Back Propagation in NNDocument30 pagesBack Propagation in NNShubhamNo ratings yet
- BackPropagation PDFDocument48 pagesBackPropagation PDFsridhiyaNo ratings yet
- GT Pract Sem 5Document19 pagesGT Pract Sem 5Teertha SomanNo ratings yet
- Proceedings ICWIT08Document381 pagesProceedings ICWIT08dzcsconfNo ratings yet
- Aptitude Overflow BookDocument1,049 pagesAptitude Overflow Bookadityapankaj55No ratings yet
- Discrete Cosine Transform (DCT) : Richard KelleyDocument21 pagesDiscrete Cosine Transform (DCT) : Richard Kelleypranu01234No ratings yet
- Liferay Portal 6 2 DatasheetDocument4 pagesLiferay Portal 6 2 Datasheetivanovitch1No ratings yet
- Cloud Computing Multiple Choice Questions and Answers-Cloud Computing BasicsDocument6 pagesCloud Computing Multiple Choice Questions and Answers-Cloud Computing BasicsIam PacificNo ratings yet
- Little TheoremDocument7 pagesLittle TheoremNiket GuptaNo ratings yet
- Matrix Chain MultiplicationDocument13 pagesMatrix Chain MultiplicationAghosh BabuNo ratings yet
- 2D TransformationDocument31 pages2D Transformationmohanmech2006886No ratings yet
- MATLAB and Simulink Lab Question Bank HITSDocument2 pagesMATLAB and Simulink Lab Question Bank HITSKeertanaNo ratings yet
- SEO-OPTIMIZED TITLEDocument11 pagesSEO-OPTIMIZED TITLEPriyanka IndraNo ratings yet
- Vlsi Implementation For High Speed AddersDocument6 pagesVlsi Implementation For High Speed AddersPardha Saradhi Damarla100% (1)
- Roth's D-Algorithm ExplainedDocument48 pagesRoth's D-Algorithm ExplainedVinod Khera100% (1)
- Assignment 11: Introduction To Machine Learning Prof. B. RavindranDocument3 pagesAssignment 11: Introduction To Machine Learning Prof. B. RavindranPraveen Kumar KandhalaNo ratings yet
- Linear Discriminant FunctionsDocument13 pagesLinear Discriminant FunctionsR Gowri PrasadNo ratings yet
- Theory of Computation MCQ SetsDocument126 pagesTheory of Computation MCQ SetsSunil JadhavNo ratings yet
- MCQ QUESTION BANK ON DISTRIBUTED COMPUTING TOPICSDocument16 pagesMCQ QUESTION BANK ON DISTRIBUTED COMPUTING TOPICSPoornima GhodkeNo ratings yet
- MODEL QUESTION PAPER DbmsDocument3 pagesMODEL QUESTION PAPER Dbmssrinivas100% (2)
- Applied Probability HW01-SolDocument3 pagesApplied Probability HW01-SolZunaash RasheedNo ratings yet
- Solid State Device Modeling 1Document199 pagesSolid State Device Modeling 1DarwinNo ratings yet
- D3804a15 Com Networks 4Document10 pagesD3804a15 Com Networks 4Surendra Singh Chauhan100% (5)
- Application of Splay TreeDocument29 pagesApplication of Splay TreeArif Ahmed100% (1)
- PDFDocument23 pagesPDFHAMDI GDHAMINo ratings yet
- Augmented RealityDocument57 pagesAugmented RealityNajeeb KhanNo ratings yet
- Trees: - Linear Access Time of Linked Lists Is ProhibitiveDocument156 pagesTrees: - Linear Access Time of Linked Lists Is ProhibitiveRoshani ShettyNo ratings yet
- Dynamic Programming Rod or Pole Cutting ProblemDocument17 pagesDynamic Programming Rod or Pole Cutting ProblemAbhishek karwalNo ratings yet
- Introduction To Machine Learning Week 2 AssignmentDocument8 pagesIntroduction To Machine Learning Week 2 AssignmentAkash barapatreNo ratings yet
- Commande Matlab LMIDocument20 pagesCommande Matlab LMIibovNo ratings yet
- LDPC - Low Density Parity Check CodesDocument6 pagesLDPC - Low Density Parity Check CodespandyakaviNo ratings yet
- Calculate Confusion MatricesDocument5 pagesCalculate Confusion MatricesRicardo GarciaNo ratings yet
- The Singular Value Decomposition (SVD)Document9 pagesThe Singular Value Decomposition (SVD)Gurpinder SinghNo ratings yet
- MCQ Set2 PTSPDocument2 pagesMCQ Set2 PTSPPrabhakara RaoNo ratings yet
- Assignment 2Document10 pagesAssignment 2Kerwin TichmannNo ratings yet
- BINARY TREE MEMORY REPRESENTATIONDocument25 pagesBINARY TREE MEMORY REPRESENTATIONpramodsoni0007No ratings yet
- MCQ (Revision Tour, Functions and File Handling) With SolutionDocument52 pagesMCQ (Revision Tour, Functions and File Handling) With SolutionsureshNo ratings yet
- Lab 1 CedarLogicSimulator NotesDocument21 pagesLab 1 CedarLogicSimulator NotesJeotazuNo ratings yet
- 1.relation & Function MCQ TestDocument2 pages1.relation & Function MCQ TestChetanNo ratings yet
- CIA 1 Solutions (2019-20) DFA and NFA ProblemsDocument4 pagesCIA 1 Solutions (2019-20) DFA and NFA ProblemsvikNo ratings yet
- CS401 1 Solution FileDocument5 pagesCS401 1 Solution FileAli Haider100% (1)
- DAA Lab Manual VTUDocument41 pagesDAA Lab Manual VTUManohar NV100% (2)
- Final Dbs MCQDocument30 pagesFinal Dbs MCQapi-370530810100% (1)
- Design Patterns Exercises - Common Architectural SolutionsDocument9 pagesDesign Patterns Exercises - Common Architectural SolutionsSnei TorberNo ratings yet
- Zigbee PresentationDocument22 pagesZigbee Presentationarchanasingh88100% (1)
- MCQDocument4 pagesMCQspraveen2007No ratings yet
- Análisis y Diseño de Algoritmos (Algorítmica III) : - Heaps - Heap Sort - Priority QueuesDocument44 pagesAnálisis y Diseño de Algoritmos (Algorítmica III) : - Heaps - Heap Sort - Priority QueuesnellyNo ratings yet
- 2016 Question Bank Computer NetworksDocument17 pages2016 Question Bank Computer Networksaarthy100% (1)
- Line Coding Schemes Design and ImplementationDocument12 pagesLine Coding Schemes Design and ImplementationRakesh VenkatesanNo ratings yet
- Yellow Highlighted Are The Unsolved Questions and Red Highlighted Are The Ones I Got in My Exam 28-2-2013 From This FileDocument27 pagesYellow Highlighted Are The Unsolved Questions and Red Highlighted Are The Ones I Got in My Exam 28-2-2013 From This FileMuhammad Sheharyar MohsinNo ratings yet
- Quiz M2Document7 pagesQuiz M2Ehizokhale Oseghale100% (1)
- Combinatorial Circuit Building Blocks: Multiplexers: S W W F S W WDocument21 pagesCombinatorial Circuit Building Blocks: Multiplexers: S W W F S W WMohammad Muntasir HassanNo ratings yet
- Neural Networks Solve XOR ProblemDocument15 pagesNeural Networks Solve XOR ProblemVeronica DumitrescuNo ratings yet
- Modulation, Resolution and Signal Processing in Radar, Sonar and Related Systems: International Series of Monographs in Electronics and InstrumentationFrom EverandModulation, Resolution and Signal Processing in Radar, Sonar and Related Systems: International Series of Monographs in Electronics and InstrumentationNo ratings yet
- Integration of One-forms on P-adic Analytic Spaces. (AM-162)From EverandIntegration of One-forms on P-adic Analytic Spaces. (AM-162)No ratings yet
- State of The ArtDocument4 pagesState of The ArtChristine EstefaniNo ratings yet
- Acr First Day Classes - EditedDocument5 pagesAcr First Day Classes - EditedBernard TerrayoNo ratings yet
- Rpms Portfolio Science DepartmentDocument52 pagesRpms Portfolio Science Departmented_ubaldeNo ratings yet
- Self-Motivated Search For Knowledge - The Path To A Sense of Personal Satisfaction, Self-Improvement and A Healthy LifeDocument4 pagesSelf-Motivated Search For Knowledge - The Path To A Sense of Personal Satisfaction, Self-Improvement and A Healthy LifeCentral Asian StudiesNo ratings yet
- Professional Summary: References Available Upon RequestDocument1 pageProfessional Summary: References Available Upon RequestShuralee JoyNo ratings yet
- Understanding Stress and Brain TheoryDocument4 pagesUnderstanding Stress and Brain TheoryJessa De JesusNo ratings yet
- Animation NC II CG (Word Version)Document24 pagesAnimation NC II CG (Word Version)Marc RiomalosNo ratings yet
- Microlearning: Knowledge Management Applications and Competency-Based Training in The WorkplaceDocument10 pagesMicrolearning: Knowledge Management Applications and Competency-Based Training in The WorkplaceAfzal MohammedNo ratings yet
- ENGR 1302 - Engineering GraphicsDocument4 pagesENGR 1302 - Engineering GraphicsAmmar AamerNo ratings yet
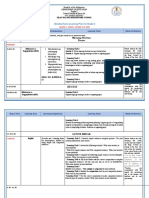
- Weekly Home Learning Plan For Grade 3: Learning Area Learning Competency Learning Tasks Mode of DeliveryDocument13 pagesWeekly Home Learning Plan For Grade 3: Learning Area Learning Competency Learning Tasks Mode of DeliveryMadonna AtendidoNo ratings yet
- A Case Study On Teacher Instructional Practices in Mathematical ModelingDocument14 pagesA Case Study On Teacher Instructional Practices in Mathematical ModelinghikmatulhusnaNo ratings yet
- Student EngagementDocument11 pagesStudent Engagementjohnnygcl576No ratings yet
- Designlab Design Courses EbookDocument50 pagesDesignlab Design Courses EbookOlya ZdrobylkoNo ratings yet
- Relation Between Documentation and Assessment, CARLA RINALDIDocument4 pagesRelation Between Documentation and Assessment, CARLA RINALDIYendéh R. MartínezNo ratings yet
- Otmc CH02Document16 pagesOtmc CH02Gabriel ParksNo ratings yet
- Servicenow Technical Training Catalog: Website NowDocument2 pagesServicenow Technical Training Catalog: Website Nowcamis_vieiraNo ratings yet
- Foreign Language Teaching MethodsDocument23 pagesForeign Language Teaching MethodsyuexiongNo ratings yet
- Thesis Fia Eka Safitriiii PDFDocument44 pagesThesis Fia Eka Safitriiii PDFFIA EKA SAFITRINo ratings yet
- Transcript Tsec Grades Template ConvDocument9 pagesTranscript Tsec Grades Template ConvAbhishek KanalNo ratings yet
- Parent Literacy NightDocument8 pagesParent Literacy Nightapi-240999165No ratings yet
- Teaching English As A Foreign Language Certicate (TEFL)Document16 pagesTeaching English As A Foreign Language Certicate (TEFL)MARUKOTANo ratings yet
- English Taught in PakistanDocument12 pagesEnglish Taught in PakistanAmmar ImranNo ratings yet
- An Analysis of Errors in English Writing of Sinhala Speaking Undergraduates Rohan AbeywickramaDocument18 pagesAn Analysis of Errors in English Writing of Sinhala Speaking Undergraduates Rohan AbeywickramahdbarazyNo ratings yet
- HDPDocument30 pagesHDPmebrahtenNo ratings yet
- Research Proposal Research TitleDocument6 pagesResearch Proposal Research TitleMaya BabaoNo ratings yet
- Lesson Plan For Teaching WritingDocument10 pagesLesson Plan For Teaching WritingSaharudin YamatoNo ratings yet