You might also like
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2From EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2No ratings yet
- Simulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetFrom EverandSimulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetNo ratings yet
- Ec 2404 - Electronic System Design LabDocument66 pagesEc 2404 - Electronic System Design LabjebadanielNo ratings yet
- PB Vs GainDocument6 pagesPB Vs Gainابزار دقیقNo ratings yet
- Ec 2404 - Electronic System Design LabDocument66 pagesEc 2404 - Electronic System Design Labsujithaa13No ratings yet
- Buck Boost Ec2404Document65 pagesBuck Boost Ec2404Sai ChandhraNo ratings yet
- Connection Description: PI Controller 1/6Document6 pagesConnection Description: PI Controller 1/6Trọng NghĩaNo ratings yet
- Synchronous GeneratorDocument19 pagesSynchronous GeneratorUdara DassanayakeNo ratings yet
- Circuit Drawing of Stepper Motor ControllerDocument24 pagesCircuit Drawing of Stepper Motor Controlleranon-814167100% (5)
- EhtcDocument38 pagesEhtcPardeepChahal100% (1)
- CSLABMANUALDocument99 pagesCSLABMANUALGOKUL RNo ratings yet
- (Rev) Lab Activity 3Document6 pages(Rev) Lab Activity 3MitzOsorioNo ratings yet
- PWM in Avr: Developed byDocument10 pagesPWM in Avr: Developed byParth Sarthi SharmaNo ratings yet
- Ac Servo Speed Torque Characteristics Measurement Unit - PREMIERDocument14 pagesAc Servo Speed Torque Characteristics Measurement Unit - PREMIERAAYUSH KUMARNo ratings yet
- 06 - Setpoint ChannelDocument21 pages06 - Setpoint ChannelSincro AutomatizacionesNo ratings yet
- Simulation of Switching ConvertersDocument103 pagesSimulation of Switching ConvertersAbdul RajakNo ratings yet
- Esd LabDocument66 pagesEsd LabJAINo ratings yet
- Control System Lab ManualDocument63 pagesControl System Lab ManualkrishnandrkNo ratings yet
- BAPCON-Sigma RTUSigma O&M Manual Draft 2Document37 pagesBAPCON-Sigma RTUSigma O&M Manual Draft 2Suman GhoshNo ratings yet
- Control SystemDocument48 pagesControl SystemOlawale John AdeotiNo ratings yet
- Servomotor FHNXHJCCDocument4 pagesServomotor FHNXHJCCPrdptiwariNo ratings yet
- Ashish Singh 2K20CEEE11 Exp-6Document6 pagesAshish Singh 2K20CEEE11 Exp-6Ashish SinghNo ratings yet
- Ehc PDFDocument55 pagesEhc PDFChakravarthi NagaNo ratings yet
- Ehc 500 MWDocument55 pagesEhc 500 MWSam100% (4)
- Lm555 555c TimerDocument12 pagesLm555 555c TimerAlexis Orellana VediaNo ratings yet
- ECE 5570 - Lab 8: Brushless DC Motor Control With 6-Step CommutationDocument6 pagesECE 5570 - Lab 8: Brushless DC Motor Control With 6-Step CommutationAnimesh GhoshNo ratings yet
- Switching Power Supply Theory and ApplicationsDocument40 pagesSwitching Power Supply Theory and ApplicationsascensorimNo ratings yet
- Chapter 9 ChangDocument37 pagesChapter 9 Changsatya sagarNo ratings yet
- Lab ManualDocument56 pagesLab ManualNishant AgrawalNo ratings yet
- Datasheet PJ494Document11 pagesDatasheet PJ494Achmad Rifdatul HisanNo ratings yet
- EHC1 500 MWDocument41 pagesEHC1 500 MWSam100% (1)
- Experiment 1: Simulation of A Three Phase Full Bridge Inverter AIMDocument11 pagesExperiment 1: Simulation of A Three Phase Full Bridge Inverter AIMSoumiya SrinivasanNo ratings yet
- Micromaster 440 Master/slaveDocument2 pagesMicromaster 440 Master/slavemehran1364No ratings yet
- 9.speed Control of DC Motor Using Chopper DriveDocument8 pages9.speed Control of DC Motor Using Chopper DriveDhivya N100% (2)
- V. Other-Excitation Idle-Loaded Pressure Build-Up Test in The GeneratorDocument51 pagesV. Other-Excitation Idle-Loaded Pressure Build-Up Test in The GeneratorClip nhungcaunoihayNo ratings yet
- An920 DDocument40 pagesAn920 DFady HachemNo ratings yet
- Three-Phase Induction MotorDocument21 pagesThree-Phase Induction MotorGovel EzraNo ratings yet
- EHC NewDocument46 pagesEHC NewSam100% (6)
- PID Control Fatek PLC ManualDocument9 pagesPID Control Fatek PLC ManualSaaddin Nur SaidNo ratings yet
- Trabajo 2Document18 pagesTrabajo 2ing_pemNo ratings yet
- PPM Rebuild Unit Manual: Testing MethodDocument15 pagesPPM Rebuild Unit Manual: Testing MethodNGUYENTHEPHAT100% (2)
- 6 Supercharging and TurbochargingDocument32 pages6 Supercharging and TurbochargingArsalan AhmadNo ratings yet
- TSCDocument23 pagesTSCKriti Srivastava100% (3)
- Fan 7314Document14 pagesFan 7314Kamal NonekNo ratings yet
- Control Systems Lab ManualDocument67 pagesControl Systems Lab ManualRockstar Rich100% (1)
- Turbo-Generator': A Presentation by Sandip Ghosh Electrical EngineeringDocument22 pagesTurbo-Generator': A Presentation by Sandip Ghosh Electrical EngineeringanuragpugaliaNo ratings yet
- Experiment 3 Control Valve-EditDocument4 pagesExperiment 3 Control Valve-EdituzmaNo ratings yet
- Rosemount 1151 User ManualDocument6 pagesRosemount 1151 User ManualDwightFerrerNo ratings yet
- Experiment 4 Control ValveDocument4 pagesExperiment 4 Control ValveKH200 73NG LIHUANo ratings yet
- Ca 3524Document20 pagesCa 3524rmsharma1970No ratings yet
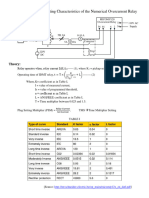
- Numerical Overcurrent Relay and Relay CoordinationDocument7 pagesNumerical Overcurrent Relay and Relay Coordinationvoyimat216No ratings yet
- MCES - 18CS44 - Unit4 PWM - DCMotorDocument9 pagesMCES - 18CS44 - Unit4 PWM - DCMotorSAKSHAM PRASADNo ratings yet
- Simulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetFrom EverandSimulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetRating: 2 out of 5 stars2/5 (1)
- Some Power Electronics Case Studies Using Matlab Simpowersystem BlocksetFrom EverandSome Power Electronics Case Studies Using Matlab Simpowersystem BlocksetNo ratings yet
- Simulation of Some Power System, Control System and Power Electronics Case Studies Using Matlab and PowerWorld SimulatorFrom EverandSimulation of Some Power System, Control System and Power Electronics Case Studies Using Matlab and PowerWorld SimulatorNo ratings yet
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1From EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1Rating: 2.5 out of 5 stars2.5/5 (3)
- PNEUMATICS AND AIR CIRCUITS UNDERSTANDING THE CASCADE VALVE AND PLC UNDERSTANDINGFrom EverandPNEUMATICS AND AIR CIRCUITS UNDERSTANDING THE CASCADE VALVE AND PLC UNDERSTANDINGNo ratings yet
- Power Electronics Applied to Industrial Systems and Transports, Volume 2: Power Converters and their ControlFrom EverandPower Electronics Applied to Industrial Systems and Transports, Volume 2: Power Converters and their ControlRating: 5 out of 5 stars5/5 (1)
- (1,37) Rep BushingDocument1 page(1,37) Rep BushingAleksandar Sasa SeferovicNo ratings yet
- Fuse Bible Complete GuideDocument162 pagesFuse Bible Complete GuideAleksandar Sasa SeferovicNo ratings yet
- Op To Isolators TheoryDocument0 pagesOp To Isolators Theoryolivirus1007No ratings yet
- Electronic Components - Jestine YongDocument7 pagesElectronic Components - Jestine Yongheretic009100% (8)
- Testing Schottky DiodeDocument3 pagesTesting Schottky DiodemaxxNo ratings yet
- MC Engine Service Experience: Exhaust Valve Bottom Piece MC/MC-C - 1997Document9 pagesMC Engine Service Experience: Exhaust Valve Bottom Piece MC/MC-C - 1997Aleksandar Sasa SeferovicNo ratings yet
- Four Years: Between OverhaulsDocument1 pageFour Years: Between OverhaulsAleksandar Sasa SeferovicNo ratings yet
- Timer OMRON ManualDocument52 pagesTimer OMRON ManualIwan BaeNo ratings yet
- Op To Isolators TheoryDocument0 pagesOp To Isolators Theoryolivirus1007No ratings yet
- 50 555circuits PDFDocument108 pages50 555circuits PDFmleslieNo ratings yet
- Omron Relay H3CR-ADocument22 pagesOmron Relay H3CR-ASaheer AmbadanNo ratings yet
- Self Oscillating 25W CFL Lamp CircuitDocument17 pagesSelf Oscillating 25W CFL Lamp CircuitJaqueline BarbosaNo ratings yet
- Relay Tech 01Document23 pagesRelay Tech 01Pritam SirpotdarNo ratings yet
- Burmeister Wain: A/S Burmeister Wain'S Motor Og Maskinfabrik Af 1971Document2 pagesBurmeister Wain: A/S Burmeister Wain'S Motor Og Maskinfabrik Af 1971Aleksandar Sasa SeferovicNo ratings yet
- SL1969 007 PDFDocument11 pagesSL1969 007 PDFBas Van TilburgNo ratings yet
- Принципиальная схема ИБП Back-UPS CS 350/500. CPU, датчики входного и выходного напряжения, EEPROM, схема включенияDocument4 pagesПринципиальная схема ИБП Back-UPS CS 350/500. CPU, датчики входного и выходного напряжения, EEPROM, схема включенияAndré BrunoNo ratings yet
- B& W Marine ServiceDocument6 pagesB& W Marine ServiceAleksandar Sasa SeferovicNo ratings yet
- B&W Marine ServiceDocument5 pagesB&W Marine ServiceAleksandar Sasa SeferovicNo ratings yet
- MAN B&W Diesel A/S: Service LetterDocument3 pagesMAN B&W Diesel A/S: Service LetterAleksandar Sasa SeferovicNo ratings yet
- Burmeister Wain: Service Letter NoDocument11 pagesBurmeister Wain: Service Letter NoAleksandar Sasa SeferovicNo ratings yet
- SL1970 014Document2 pagesSL1970 014Aleksandar Sasa SeferovicNo ratings yet
- MAN D El: New Addre e The UDocument2 pagesMAN D El: New Addre e The UAleksandar Sasa SeferovicNo ratings yet
- SL1969 013 PDFDocument4 pagesSL1969 013 PDFBas Van TilburgNo ratings yet
- MAN Diesel: Rubber Diaphragm Sealings in Crankcase Oil OutletsDocument4 pagesMAN Diesel: Rubber Diaphragm Sealings in Crankcase Oil OutletsAleksandar Sasa Seferovic100% (1)
- SL1968 005 PDFDocument33 pagesSL1968 005 PDFBas Van TilburgNo ratings yet
- MAN B&W Diesel: Service LetterDocument3 pagesMAN B&W Diesel: Service LetterAleksandar Sasa SeferovicNo ratings yet
- M.A.N - B&W Diesel: Service LetterDocument5 pagesM.A.N - B&W Diesel: Service LetterAleksandar Sasa SeferovicNo ratings yet
- MAN B&W Diesel A/S: Service LetterDocument4 pagesMAN B&W Diesel A/S: Service LetterAleksandar Sasa SeferovicNo ratings yet
- B&W Marine ServiceDocument3 pagesB&W Marine ServiceAleksandar Sasa SeferovicNo ratings yet
- B&W Marine Service: K98FF-GFDocument2 pagesB&W Marine Service: K98FF-GFAleksandar Sasa SeferovicNo ratings yet
- Java Edition Data Values - Official Minecraft WikiDocument140 pagesJava Edition Data Values - Official Minecraft WikiCristian Rene SuárezNo ratings yet
- Note Hand-Soldering eDocument8 pagesNote Hand-Soldering emicpreampNo ratings yet
- Salwico CS4000 Fire Detection System: Consilium Marine ABDocument38 pagesSalwico CS4000 Fire Detection System: Consilium Marine ABJexean SañoNo ratings yet
- PUPiApplyVoucher2017 0006 3024Document2 pagesPUPiApplyVoucher2017 0006 3024MätthëwPïńëdäNo ratings yet
- Black Hole Safety Brochure Trifold FinalDocument2 pagesBlack Hole Safety Brochure Trifold Finalvixy1830No ratings yet
- King Saud UniversityDocument10 pagesKing Saud UniversitypganoelNo ratings yet
- Project On Mahindra BoleroDocument35 pagesProject On Mahindra BoleroViPul75% (8)
- Eaai S 23 02045 PDFDocument28 pagesEaai S 23 02045 PDFAnjali JainNo ratings yet
- Adding and Subtracting FractionsDocument4 pagesAdding and Subtracting Fractionsapi-508898016No ratings yet
- Pepperberg Notes On The Learning ApproachDocument3 pagesPepperberg Notes On The Learning ApproachCristina GherardiNo ratings yet
- Jordan CVDocument2 pagesJordan CVJordan Ryan SomnerNo ratings yet
- Context in TranslationDocument23 pagesContext in TranslationRaluca FloreaNo ratings yet
- Model 900 Automated Viscometer: Drilling Fluids EquipmentDocument2 pagesModel 900 Automated Viscometer: Drilling Fluids EquipmentJazminNo ratings yet
- Operator'S Manual PM20X-X-X-BXX: 2" Diaphragm PumpDocument12 pagesOperator'S Manual PM20X-X-X-BXX: 2" Diaphragm PumpOmar TadeoNo ratings yet
- Landcorp FLCC Brochure 2013 v3Document6 pagesLandcorp FLCC Brochure 2013 v3Shadi GarmaNo ratings yet
- Measures For FloodsDocument4 pagesMeasures For FloodsMutsitsikoNo ratings yet
- PMDG 737NGX Tutorial 2 PDFDocument148 pagesPMDG 737NGX Tutorial 2 PDFMatt HenryNo ratings yet
- Retail Operations ManualDocument44 pagesRetail Operations ManualKamran Siddiqui100% (2)
- LP MAPEH 10 1st Quarter Printing Final.Document29 pagesLP MAPEH 10 1st Quarter Printing Final.tatineeesamonteNo ratings yet
- Reviewer in EntrepreneurshipDocument6 pagesReviewer in EntrepreneurshipRachelle Anne SaldeNo ratings yet
- Chandigarh Distilers N BotlersDocument3 pagesChandigarh Distilers N BotlersNipun GargNo ratings yet
- Purification of Dilactide by Melt CrystallizationDocument4 pagesPurification of Dilactide by Melt CrystallizationRaj SolankiNo ratings yet
- B.e.eeeDocument76 pagesB.e.eeeGOPINATH.MNo ratings yet
- Tutorial 6Document3 pagesTutorial 6Lai Qing YaoNo ratings yet
- Net Pert: Cable QualifierDocument4 pagesNet Pert: Cable QualifierAndrés Felipe Fandiño MNo ratings yet
- Subject: PSCP (15-10-19) : Syllabus ContentDocument4 pagesSubject: PSCP (15-10-19) : Syllabus ContentNikunjBhattNo ratings yet
- Categories of Cargo and Types of ShipsDocument14 pagesCategories of Cargo and Types of ShipsVibhav Kumar100% (1)
- Aashirwaad Notes For CA IPCC Auditing & Assurance by Neeraj AroraDocument291 pagesAashirwaad Notes For CA IPCC Auditing & Assurance by Neeraj AroraMohammed NasserNo ratings yet
- MSDS Formic AcidDocument3 pagesMSDS Formic AcidChirag DobariyaNo ratings yet
- Edtpa Lesson 3Document3 pagesEdtpa Lesson 3api-299319227No ratings yet