You might also like
- Introduction to Power System ProtectionFrom EverandIntroduction to Power System ProtectionRating: 5 out of 5 stars5/5 (1)
- Practical Troubleshooting of Electrical Equipment and Control CircuitsFrom EverandPractical Troubleshooting of Electrical Equipment and Control CircuitsRating: 4 out of 5 stars4/5 (5)
- Bartleby QN AGuidelinesDocument51 pagesBartleby QN AGuidelinesAryA Jack73% (11)
- Final TELP 2019 AppDocument23 pagesFinal TELP 2019 AppRajib Kumar PaulNo ratings yet
- Hobbywing WP 1040Document2 pagesHobbywing WP 1040andresNo ratings yet
- Paper Review 1234Document18 pagesPaper Review 1234Gedef YirgalemNo ratings yet
- Power System Transient Stability Analysis Using EtAPDocument6 pagesPower System Transient Stability Analysis Using EtAPsamirparida81100% (1)
- Understanding Generator Power System StabilizerDocument12 pagesUnderstanding Generator Power System StabilizerRamakrishna100% (1)
- Power System Stabliity Using Power World SimulatorDocument24 pagesPower System Stabliity Using Power World SimulatorfaizanNo ratings yet
- Electrical Engineering Engineering Power System Analysis and Stability Stability Studies NotesDocument32 pagesElectrical Engineering Engineering Power System Analysis and Stability Stability Studies NotesAliEjazNo ratings yet
- Stability Analysis of Power System Interms of Load CurtailmentDocument6 pagesStability Analysis of Power System Interms of Load CurtailmentLethargic AzadhirachtaNo ratings yet
- 10 11648 J Sjee 20200804 11Document10 pages10 11648 J Sjee 20200804 11Apila NiangaNo ratings yet
- UNIT-7 & 8 Transient Stability StudiesDocument35 pagesUNIT-7 & 8 Transient Stability StudiesVishalSinghNo ratings yet
- Out-Of-Step Protection Fundamentals and Advancements: BstractDocument26 pagesOut-Of-Step Protection Fundamentals and Advancements: BstractalimaghamiNo ratings yet
- Pages From 10.11648.j.eas.20180301.12-2Document2 pagesPages From 10.11648.j.eas.20180301.12-2Mohamed ZaghloulNo ratings yet
- Gen - Prot WcpyrtDocument17 pagesGen - Prot WcpyrtAshwinKumar GoswamiNo ratings yet
- Variable Frequency Transformer Paper ArezkiDocument9 pagesVariable Frequency Transformer Paper ArezkiRam SankarNo ratings yet
- Unit VDocument29 pagesUnit Vv.saigeetha lakshmiNo ratings yet
- Final Year Project Report Jani PDFDocument5 pagesFinal Year Project Report Jani PDFMuhammad AbdullahNo ratings yet
- Solly Aryza - Novelty Stability of Electrical System Single Machine Based Runge Kutta Orde 4 Method PDFDocument6 pagesSolly Aryza - Novelty Stability of Electrical System Single Machine Based Runge Kutta Orde 4 Method PDFAndysah Putra Utama SiahaanNo ratings yet
- Analog Ee-1Document9 pagesAnalog Ee-1Shubham EdlaNo ratings yet
- CH4 PPTDocument71 pagesCH4 PPTChalachew1212 mezgebuNo ratings yet
- Lecture 18 System StabilityDocument33 pagesLecture 18 System StabilityTEMIDAYONo ratings yet
- Power System StabilityDocument20 pagesPower System Stabilitynoor100% (3)
- Analysis of Power System StabilityDocument31 pagesAnalysis of Power System Stabilitytarnedo1100% (1)
- Transient Stability Analysis of Power SystemDocument11 pagesTransient Stability Analysis of Power SystemSunil Rai100% (2)
- Chapter 12Document23 pagesChapter 12sachin235No ratings yet
- MATLAB-Based Transient Stability Analysis of A Power SystemDocument34 pagesMATLAB-Based Transient Stability Analysis of A Power Systemsamarahmad2008479875% (4)
- PSS ControllerDocument14 pagesPSS ControllerAnonymous BBX2E87aHNo ratings yet
- Swing EquationDocument6 pagesSwing EquationVaibhav kumbhar100% (1)
- ESBI White Paper Delayed Zero Crossings Following Short Circuit PDFDocument6 pagesESBI White Paper Delayed Zero Crossings Following Short Circuit PDFbgojkovic13No ratings yet
- Power System Stability-Chapter 3Document84 pagesPower System Stability-Chapter 3Du TrầnNo ratings yet
- Course of Power Systems Control and StabilityDocument10 pagesCourse of Power Systems Control and StabilityAraouf GaaloulNo ratings yet
- Power Swing BlockingDocument4 pagesPower Swing Blockingdetectiveholmes0% (1)
- Transient Stability Analysis of Multi-Machine Power SystemsDocument4 pagesTransient Stability Analysis of Multi-Machine Power SystemsrdelgranadoNo ratings yet
- Transient Stability Analysis of Generation and Transmission System of A Thermal Power Plant of PakistanDocument18 pagesTransient Stability Analysis of Generation and Transmission System of A Thermal Power Plant of Pakistanmattie aqeelNo ratings yet
- A Review On Application of FACTS Devices in Power System Stability ImprovementDocument5 pagesA Review On Application of FACTS Devices in Power System Stability ImprovementIJSTANo ratings yet
- HVE Question BankDocument27 pagesHVE Question BankArpit MehtaNo ratings yet
- Modelling and Simulation of Armature ControlledDocument7 pagesModelling and Simulation of Armature ControlledPrathap VuyyuruNo ratings yet
- BlauDocument6 pagesBlauhappyworryNo ratings yet
- 2-15-1466427029-1. Electrical - Ijeee - Coordinated Effect of Power System Stabilizer - Rampreet ManjhiDocument10 pages2-15-1466427029-1. Electrical - Ijeee - Coordinated Effect of Power System Stabilizer - Rampreet Manjhirobertovm2002No ratings yet
- Determination of Critical Clearing Time in Transient Stability AnalysisDocument5 pagesDetermination of Critical Clearing Time in Transient Stability Analysisblue_sea_00No ratings yet
- Solution of Swing Equation For Transient Stability Analysis in Dual-Machine SystemDocument6 pagesSolution of Swing Equation For Transient Stability Analysis in Dual-Machine SystemIOSRJEN : hard copy, certificates, Call for Papers 2013, publishing of journalNo ratings yet
- CHAPTERS-1,2 NewDocument14 pagesCHAPTERS-1,2 Newthai anbuNo ratings yet
- Power System Dynamics and ControldocxDocument6 pagesPower System Dynamics and ControldocxSachin gopeNo ratings yet
- IJETR032565Document3 pagesIJETR032565erpublicationNo ratings yet
- Analysis of Transient Stability of Superconductor Synchronous Generator with Fault Current LimiterDocument26 pagesAnalysis of Transient Stability of Superconductor Synchronous Generator with Fault Current LimiterPedro BenevidesNo ratings yet
- Lecture 11Document19 pagesLecture 11Asikur Hasan SaumikNo ratings yet
- Pole Slip ProtectionDocument10 pagesPole Slip ProtectionAdrian ConstantinNo ratings yet
- Funnab Dr. Mathew EditedDocument30 pagesFunnab Dr. Mathew EditedATILOLA SILASNo ratings yet
- Power Swing Detection v1.1Document29 pagesPower Swing Detection v1.1hathanhchinh2279No ratings yet
- Influence of DC Component During Inadvertent Operation of The High Voltage Generator Circuit Breaker During Mis-SynchronizationDocument11 pagesInfluence of DC Component During Inadvertent Operation of The High Voltage Generator Circuit Breaker During Mis-SynchronizationVikas VernekarNo ratings yet
- Power System StabilityDocument29 pagesPower System StabilityRanieri BenčićNo ratings yet
- Question 1Document15 pagesQuestion 1Prasun SinhaNo ratings yet
- IEEE Transactions: OccursDocument7 pagesIEEE Transactions: OccursFelix GamarraNo ratings yet
- Distance Protection During Asymmetrical Power Swings: Challenges and SolutionsDocument10 pagesDistance Protection During Asymmetrical Power Swings: Challenges and SolutionsRahul SawantNo ratings yet
- Heaven's Light Is Our GuideDocument20 pagesHeaven's Light Is Our GuideMD.HOJAIFANo ratings yet
- Transient Stability Performance Analysis of Power System Using Facts DevicesDocument7 pagesTransient Stability Performance Analysis of Power System Using Facts Devicesrasim_m1146No ratings yet
- Slootweg2 Pessm 01 PDFDocument6 pagesSlootweg2 Pessm 01 PDFStefania OliveiraNo ratings yet
- 09 Dynamic StabilityDocument36 pages09 Dynamic StabilitymentongNo ratings yet
- Power Electronics Applied to Industrial Systems and Transports, Volume 3: Switching Power SuppliesFrom EverandPower Electronics Applied to Industrial Systems and Transports, Volume 3: Switching Power SuppliesNo ratings yet
- Influence of System Parameters Using Fuse Protection of Regenerative DC DrivesFrom EverandInfluence of System Parameters Using Fuse Protection of Regenerative DC DrivesNo ratings yet
- MATLAB ODE Solvers: ode23 and ode45 ExamplesDocument4 pagesMATLAB ODE Solvers: ode23 and ode45 ExamplesramhknNo ratings yet
- The Role of Chemistry in Environmental ProtectionDocument1 pageThe Role of Chemistry in Environmental ProtectionSadil BatafNo ratings yet
- Communications Chapter Two PDFDocument42 pagesCommunications Chapter Two PDFMustafa AlobaidiNo ratings yet
- For Causal Impulse ResponseDocument3 pagesFor Causal Impulse ResponseSadil BatafNo ratings yet
- 3 ELG4157LeadCompensatorExampleDocument3 pages3 ELG4157LeadCompensatorExampleSadil BatafNo ratings yet
- Formation of Y-Bus MatrixDocument4 pagesFormation of Y-Bus MatrixSadil BatafNo ratings yet
- Matlab Prog PDFDocument1,356 pagesMatlab Prog PDFSachin DhariwalNo ratings yet
- Lec09 ARMisaDocument101 pagesLec09 ARMisaCristian Daniel BerettaNo ratings yet
- LNA Design: Iulian Rosu, YO3DAC / VA3IULDocument15 pagesLNA Design: Iulian Rosu, YO3DAC / VA3IULAdi NugrahaNo ratings yet
- Normal DistributionDocument10 pagesNormal DistributionLello FloNo ratings yet
- Normal DistributionDocument10 pagesNormal DistributionLello FloNo ratings yet
- Sentence Combining: The Basics: FANBOYS Acronym (For, And, Nor, But, Or, Yet, So)Document2 pagesSentence Combining: The Basics: FANBOYS Acronym (For, And, Nor, But, Or, Yet, So)Long VichekaNo ratings yet
- TransientsDocument11 pagesTransientsChibi ConfusionNo ratings yet
- HW9 SolutionsDocument5 pagesHW9 SolutionsAndreas mNo ratings yet
- HW9 SolutionsDocument5 pagesHW9 SolutionsAndreas mNo ratings yet
- SCS1203 Fundamentals of Digital Systems - Boolean Algebra and Logic Gates Chapter - Circuits with Latches Analysis and DesignDocument20 pagesSCS1203 Fundamentals of Digital Systems - Boolean Algebra and Logic Gates Chapter - Circuits with Latches Analysis and DesignSadil BatafNo ratings yet
- Full Wave Rectifier - PDF 2Document10 pagesFull Wave Rectifier - PDF 2Gulshan KataraNo ratings yet
- Exp 5Document6 pagesExp 5Frew FrewNo ratings yet
- E Grammar Exercises Ebook DemoDocument39 pagesE Grammar Exercises Ebook DemoFaizullahMagsiNo ratings yet
- ECE-223 Digital Design Solutions Assignment 4Document7 pagesECE-223 Digital Design Solutions Assignment 4رغوووودي رغووووديNo ratings yet
- Lab#3A: Full-Wave Bridge Rectifier Circuit Without and With FilterDocument6 pagesLab#3A: Full-Wave Bridge Rectifier Circuit Without and With FilterSadil BatafNo ratings yet
- List of Irregular Verbs: Base Form - Past Simple - Past ParticipleDocument2 pagesList of Irregular Verbs: Base Form - Past Simple - Past ParticipleDaniel MagcalasNo ratings yet
- Thoreb K30Document3 pagesThoreb K30Daniel fernando Perdomo RomeroNo ratings yet
- Securaplane - Emergency Batteries - xl243bd-1703820906sDocument2 pagesSecuraplane - Emergency Batteries - xl243bd-1703820906sshaggipcNo ratings yet
- MATLAB Matrices and DC Circuits AnalysisDocument5 pagesMATLAB Matrices and DC Circuits AnalysisAhmad Ash SharkawiNo ratings yet
- F0371102 Etos Td-Ed en PDFDocument12 pagesF0371102 Etos Td-Ed en PDFrichardt999No ratings yet
- kd43x7 F SeriesDocument142 pageskd43x7 F SeriesGiovyinformatic della portaNo ratings yet
- Isa 71.02 1991 PDFDocument16 pagesIsa 71.02 1991 PDFQuang Duan NguyenNo ratings yet
- Mechatronics Unit 1Document21 pagesMechatronics Unit 1rajkiran_raj100% (1)
- Socket Outlet 01 Phase - Platform SupplyDocument1 pageSocket Outlet 01 Phase - Platform SupplynautelNo ratings yet
- A Review of 5G Technology: Architecture, Security and Wide ApplicationsDocument32 pagesA Review of 5G Technology: Architecture, Security and Wide ApplicationsMeer Zafarullah NoohaniNo ratings yet
- Installation and Operation User Guide: Global Leader in Marine Satellite Antenna SystemsDocument147 pagesInstallation and Operation User Guide: Global Leader in Marine Satellite Antenna SystemsAnonymous SHWrJONo ratings yet
- Introduction To AVRDocument14 pagesIntroduction To AVRkrishna mohan pandeyNo ratings yet
- 900 400 - SM - V2.1.0 - 11747 S0 20160601 en PDFDocument123 pages900 400 - SM - V2.1.0 - 11747 S0 20160601 en PDFIsai Lara Osoria100% (3)
- Anemoeter: A Hemispherical Cup Anemometer of The Type Invented in 1846 byDocument5 pagesAnemoeter: A Hemispherical Cup Anemometer of The Type Invented in 1846 byFAHAD BINNo ratings yet
- Dutton Marcus F 201105 PHD PDFDocument230 pagesDutton Marcus F 201105 PHD PDFBharat NarumanchiNo ratings yet
- Philips 190TW8FB.00Document90 pagesPhilips 190TW8FB.00kemog100% (1)
- Schem e For Tie, Trafo, MotorDocument52 pagesSchem e For Tie, Trafo, Motormukesh_kht1No ratings yet
- CSE Syllabus Comilla University 1011Document26 pagesCSE Syllabus Comilla University 1011me homerNo ratings yet
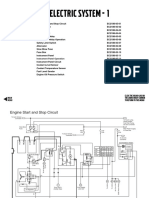
- Electric System - 1: Master Switch Battery RelayDocument18 pagesElectric System - 1: Master Switch Battery RelayLeopoldo Del Campo100% (4)
- PHYSICS Paper 3 - Section BDocument7 pagesPHYSICS Paper 3 - Section BChc Physics PllNo ratings yet
- Design and Development of SMA-actuated CPR SystemDocument11 pagesDesign and Development of SMA-actuated CPR SystemHarsh NigamNo ratings yet
- Elmeasure - ATES - Automatic Transfer Switch Manufacturers in IndiaDocument6 pagesElmeasure - ATES - Automatic Transfer Switch Manufacturers in Indiaanoop ajayNo ratings yet
- 1 454Document1 page1 454elrudo11No ratings yet
- Syllabus (ME Applied Elect)Document3 pagesSyllabus (ME Applied Elect)Hari Ram KNo ratings yet
- Extremewireless Wing 7532 802.11ac Access Point: Maximum Speed. Minimum CostDocument7 pagesExtremewireless Wing 7532 802.11ac Access Point: Maximum Speed. Minimum Costjarko tarrilloNo ratings yet
- Powercommand Transfer Switches: Seamlessly, Reliably and Safely Meet Your Critical Power NeedsDocument13 pagesPowercommand Transfer Switches: Seamlessly, Reliably and Safely Meet Your Critical Power NeedsdouglasdmixNo ratings yet
- Q.Peak Duo Xl-G11.3: Enduring High PerformanceDocument2 pagesQ.Peak Duo Xl-G11.3: Enduring High Performancezheljoy datuinNo ratings yet
- Ultrasonic Fuel Sensor Data Sheet UF202Document7 pagesUltrasonic Fuel Sensor Data Sheet UF202Rahul AroraNo ratings yet
- Fm4800 OenDocument143 pagesFm4800 OensandroNo ratings yet