You might also like
- Green's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)From EverandGreen's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)No ratings yet
- Signal Processing Review: 3.1 LTI SystemsDocument22 pagesSignal Processing Review: 3.1 LTI SystemsnctgayarangaNo ratings yet
- 10A.1 Multirate Signal ProcessingDocument8 pages10A.1 Multirate Signal ProcessingIamINNo ratings yet
- Practice Session 2 With AnswersDocument5 pagesPractice Session 2 With AnswersMds DmsNo ratings yet
- Poisson ProcessDocument104 pagesPoisson ProcesssobanaNo ratings yet
- Lec 4Document3 pagesLec 4Atom CarbonNo ratings yet
- Discrete-Time Signal ProcessingDocument22 pagesDiscrete-Time Signal ProcessingPandu KNo ratings yet
- Final - ST4238 1f6mnp9Document5 pagesFinal - ST4238 1f6mnp9Raihan Masyal HaidarNo ratings yet
- Optimal Receiver For The AWGN Channel: Saravanan Vijayakumaran Sarva@ee - Iitb.ac - inDocument50 pagesOptimal Receiver For The AWGN Channel: Saravanan Vijayakumaran Sarva@ee - Iitb.ac - inMOHIT KUMAR DADWALNo ratings yet
- Topic18 Design of FIR FiltersDocument7 pagesTopic18 Design of FIR FiltersAkshatNo ratings yet
- Signal - System - Ch2 (LTIV)Document42 pagesSignal - System - Ch2 (LTIV)Nigar QurbanovaNo ratings yet
- From The Numerical Solution To The Symbolic Form.Document10 pagesFrom The Numerical Solution To The Symbolic Form.Erno ScheiberNo ratings yet
- Ebook Pimsleur French 1Document10 pagesEbook Pimsleur French 1Gabriel SchultzNo ratings yet
- s131 Reviewer 002Document14 pagess131 Reviewer 002lucy heartfiliaNo ratings yet
- Poisson Processes and Continuous-Time Markov Chains-1Document4 pagesPoisson Processes and Continuous-Time Markov Chains-1rrbygzvalathxgnhsqNo ratings yet
- ELEN3012 - 2020 Part 1Document6 pagesELEN3012 - 2020 Part 1Bongani MofokengNo ratings yet
- Opuscula Math 3205 PDFDocument8 pagesOpuscula Math 3205 PDFAntonio Torres PeñaNo ratings yet
- المرشحات التشابهية 1Document9 pagesالمرشحات التشابهية 1adilNo ratings yet
- Principles of CommunicationDocument42 pagesPrinciples of CommunicationSachin DoddamaniNo ratings yet
- Lecture4 DSPDocument24 pagesLecture4 DSPfouadbalomiNo ratings yet
- Spring06 1 PDFDocument26 pagesSpring06 1 PDFLuis Alberto FuentesNo ratings yet
- Convolution:: Formula SheetDocument2 pagesConvolution:: Formula SheetMengistu AberaNo ratings yet
- Electronic Journal of Qualitative Theory of Differential Equations 2007, No. 21, 1-10 HTTP://WWW - Math.u-Szeged - Hu/ejqtdeDocument10 pagesElectronic Journal of Qualitative Theory of Differential Equations 2007, No. 21, 1-10 HTTP://WWW - Math.u-Szeged - Hu/ejqtdeLuis FuentesNo ratings yet
- 11 Stat PrelimDocument6 pages11 Stat PrelimLucas PiroulusNo ratings yet
- Ee20 hw5 s10 SolDocument7 pagesEe20 hw5 s10 Solpock3tkingsNo ratings yet
- Hyperbolic Measures, Moments and Coefficients. Algebra On Hyperbolic FunctionsDocument47 pagesHyperbolic Measures, Moments and Coefficients. Algebra On Hyperbolic Functionsalex zambrano guillermoNo ratings yet
- Untitled 1Document5 pagesUntitled 1rishiNo ratings yet
- Systems of First Order Differential Equations: Department of Mathematics IIT Guwahati Shb/SuDocument16 pagesSystems of First Order Differential Equations: Department of Mathematics IIT Guwahati Shb/SuakshayNo ratings yet
- GEORGIAN MATHEMATICAL JOURNAL: Vol. 5, No. 2, 1998, 101-106: Key Words and Phrases. Ergodic Hilbert TransformDocument6 pagesGEORGIAN MATHEMATICAL JOURNAL: Vol. 5, No. 2, 1998, 101-106: Key Words and Phrases. Ergodic Hilbert TransformLuis Alberto FuentesNo ratings yet
- Windowing TechniquesDocument103 pagesWindowing TechniquesM.Lohitha chandramukhiNo ratings yet
- PRML Solution ManualDocument253 pagesPRML Solution ManualHaolong LiuNo ratings yet
- Lindemann-Weierstrass TheoremDocument6 pagesLindemann-Weierstrass TheoremAndrés GranadosNo ratings yet
- Some Applications of The Poisson ProcessDocument8 pagesSome Applications of The Poisson ProcessdanielNo ratings yet
- Solutions HWA Chap 6 7Document8 pagesSolutions HWA Chap 6 7KenNo ratings yet
- Unit IIDocument17 pagesUnit IISivapriya SNo ratings yet
- Introduction of Signals and Systems - Part02Document45 pagesIntroduction of Signals and Systems - Part02HermyraJ RobertNo ratings yet
- Chapter 3 - Questions and Solutions: Edwin FennellDocument10 pagesChapter 3 - Questions and Solutions: Edwin FennellMerna AtefNo ratings yet
- Module 1 - Part 2Document42 pagesModule 1 - Part 2Aarshitha PrakashNo ratings yet
- 2021 - w3 Math FoundationDocument24 pages2021 - w3 Math FoundationM. AnggaNo ratings yet
- Tutorial 1 - Signals (1) (Exercises)Document2 pagesTutorial 1 - Signals (1) (Exercises)Valentina GarzónNo ratings yet
- Continuous & Discrete SystemsDocument14 pagesContinuous & Discrete Systemsopenid_ZufDFRTuNo ratings yet
- V&N 354 - LectureLesing1Document4 pagesV&N 354 - LectureLesing1YemukelaniNo ratings yet
- Appliedstat 2017 Chapter 10 11Document23 pagesAppliedstat 2017 Chapter 10 11Vivian HuNo ratings yet
- MST562 Lecture 16 - Renewal Processes (Student)Document11 pagesMST562 Lecture 16 - Renewal Processes (Student)Hajar Nur HumairaNo ratings yet
- DSP 2 Fourier AnalysisDocument54 pagesDSP 2 Fourier AnalysisAira Mae CrespoNo ratings yet
- 2.2.3 Minimum Variance Unbiased Estimators: 2.2. Point EstimationDocument9 pages2.2.3 Minimum Variance Unbiased Estimators: 2.2. Point EstimationLiban Ali MohamudNo ratings yet
- Topic 5 System Properties and Convolution SumDocument5 pagesTopic 5 System Properties and Convolution SumRona SharmaNo ratings yet
- Shaomei Fang Jinyan Li and Zhenfu CaiDocument9 pagesShaomei Fang Jinyan Li and Zhenfu CaiGHERFI ABDELHAFIDNo ratings yet
- Acta Mathematica Vietnamica 251 Volume 23, Number 3, 2000, Pp. 251-260Document10 pagesActa Mathematica Vietnamica 251 Volume 23, Number 3, 2000, Pp. 251-260Nguyễn Hữu Điển100% (2)
- Section 4 - Stochastic Calculus-1Document12 pagesSection 4 - Stochastic Calculus-1Samuel EricksonNo ratings yet
- Unit-V-18mab201t-Notes MATHS.Document50 pagesUnit-V-18mab201t-Notes MATHS.td4520No ratings yet
- 1st Order Polarizability-1Document5 pages1st Order Polarizability-1bumba_90No ratings yet
- Formula Notes Signals and SystemsDocument23 pagesFormula Notes Signals and SystemsimmadiuttejNo ratings yet
- If Y Is A Proper Finite Dimensional Subspace of Normed Space X, Then Dist (X, Y) 1Document3 pagesIf Y Is A Proper Finite Dimensional Subspace of Normed Space X, Then Dist (X, Y) 1Rishabh SarmaNo ratings yet
- HW1 SolutionDocument3 pagesHW1 SolutionZim ShahNo ratings yet
- Oscillation of Nonlinear Neutral Delay Differential Equations PDFDocument20 pagesOscillation of Nonlinear Neutral Delay Differential Equations PDFKulin DaveNo ratings yet
- Estimation Theory EngDocument40 pagesEstimation Theory EngVe EKNo ratings yet
- FishingDocument10 pagesFishingvickyNo ratings yet
- Poisson PDFDocument46 pagesPoisson PDFjozsefNo ratings yet
- Course Notes 7824 Part8 PDFDocument9 pagesCourse Notes 7824 Part8 PDFHrishikesh BabuNo ratings yet
- Topic 5: Transform-Domain Systems: ELEN E4810: Digital Signal ProcessingDocument35 pagesTopic 5: Transform-Domain Systems: ELEN E4810: Digital Signal ProcessingZeros AlmightyNo ratings yet
- L03 FourierDocument59 pagesL03 FourierZeros AlmightyNo ratings yet
- Topic 2: Time Domain: ELEN E4810: Digital Signal ProcessingDocument60 pagesTopic 2: Time Domain: ELEN E4810: Digital Signal ProcessingZeros AlmightyNo ratings yet
- Topic 4: The Z Transform: ELEN E4810: Digital Signal ProcessingDocument36 pagesTopic 4: The Z Transform: ELEN E4810: Digital Signal ProcessingZeros AlmightyNo ratings yet
- Topic 4: The Z Transform: ELEN E4810: Digital Signal ProcessingDocument36 pagesTopic 4: The Z Transform: ELEN E4810: Digital Signal ProcessingZeros AlmightyNo ratings yet
- Topic 1: Introduction: ELEN E4810: Digital Signal ProcessingDocument42 pagesTopic 1: Introduction: ELEN E4810: Digital Signal ProcessingZeros AlmightyNo ratings yet
- L03 FourierDocument59 pagesL03 FourierZeros AlmightyNo ratings yet
- Topic 2: Time Domain: ELEN E4810: Digital Signal ProcessingDocument60 pagesTopic 2: Time Domain: ELEN E4810: Digital Signal ProcessingZeros AlmightyNo ratings yet
- Topic 1: Introduction: ELEN E4810: Digital Signal ProcessingDocument42 pagesTopic 1: Introduction: ELEN E4810: Digital Signal ProcessingZeros AlmightyNo ratings yet
- 2D1N Night Nueva VizcayaDocument3 pages2D1N Night Nueva VizcayaKaye RoldanNo ratings yet
- PokeDex ChecklistDocument7 pagesPokeDex ChecklistJosh StrıkeNo ratings yet
- Market Size Estimation WhitepaperDocument10 pagesMarket Size Estimation WhitepaperAmit AshishNo ratings yet
- Learning Curves in Manufacturing IndustriesDocument3 pagesLearning Curves in Manufacturing Industriessubhash221103No ratings yet
- Decimal To BinaryDocument3 pagesDecimal To BinaryAngel AntonioNo ratings yet
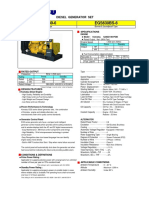
- Egs630-6 Komatsu GensetDocument2 pagesEgs630-6 Komatsu GensetimamfadiliNo ratings yet
- Instruction Manual FisherDocument20 pagesInstruction Manual FisherPrado_MoisesNo ratings yet
- Intelligence PresentationDocument50 pagesIntelligence PresentationChester Cuarentas100% (1)
- Evaluation Exam 1 Math Algebra and Trigonometry SET ADocument2 pagesEvaluation Exam 1 Math Algebra and Trigonometry SET AEngr. HLDCNo ratings yet
- Add Math Project 2012 SabahDocument32 pagesAdd Math Project 2012 SabahIrsyadNo ratings yet
- Development Operations: Presented by Ms. Caranay & Mr. EstradaDocument12 pagesDevelopment Operations: Presented by Ms. Caranay & Mr. Estradaangelo perezNo ratings yet
- Apex CheatsheetDocument4 pagesApex CheatsheetAmit GangwarNo ratings yet
- 3 New MessagesDocument1 page3 New Messagesjohnjuni300No ratings yet
- Cambridge O Level: Art and Design 6090/01 May/June 2020Document4 pagesCambridge O Level: Art and Design 6090/01 May/June 2020Jack KowmanNo ratings yet
- Alfa Laval PHEDocument16 pagesAlfa Laval PHESergio SmithNo ratings yet
- Cat Reforming Part 2 3 PDF FreeDocument68 pagesCat Reforming Part 2 3 PDF FreeLê Trường AnNo ratings yet
- Political Discourse A Critical Discourse Discourse A Critical Discourse AnalysisDocument13 pagesPolitical Discourse A Critical Discourse Discourse A Critical Discourse AnalysisJennina MazoNo ratings yet
- Deber Modelación de AguasDocument2 pagesDeber Modelación de AguasLiz VillamarNo ratings yet
- BAH Series 6000 Manguard - 113534-91Document40 pagesBAH Series 6000 Manguard - 113534-91AhmedNo ratings yet
- FIS-Finishes Schedule - R1Document4 pagesFIS-Finishes Schedule - R1meghadurganNo ratings yet
- Manufacturing Process AssignmentDocument5 pagesManufacturing Process AssignmentPalani SuntharajanNo ratings yet
- Creative FRP Design GuideDocument255 pagesCreative FRP Design GuideVincenzo Praturlon100% (1)
- SENIOR HIGH SCHOOL-English For Academic and Professional PurposesDocument7 pagesSENIOR HIGH SCHOOL-English For Academic and Professional Purposesjoshua herreraNo ratings yet
- 6 Lifetime Extension Through PDFDocument10 pages6 Lifetime Extension Through PDFdavih007No ratings yet
- Geometry of Middle SurfaceDocument29 pagesGeometry of Middle SurfaceParth ShahNo ratings yet
- Triangulation Research PaperDocument3 pagesTriangulation Research PaperCharmaine Montimor OrdonioNo ratings yet
- Journal Innovation Knowledge: Indicators Used To Measure Service Innovation and Manufacturing InnovationDocument16 pagesJournal Innovation Knowledge: Indicators Used To Measure Service Innovation and Manufacturing InnovationHj SuhaimiNo ratings yet
- Practical Questions BookletDocument37 pagesPractical Questions BookletPrecious ChirangareNo ratings yet
- Pokemon Black 2 and White 2 USA Action Replay Official Code ListDocument12 pagesPokemon Black 2 and White 2 USA Action Replay Official Code ListW A R R E N100% (1)
- Schlosser Distillation SSCHI 2011 256Document14 pagesSchlosser Distillation SSCHI 2011 256Brandon LizardoNo ratings yet