You might also like
- The Process, Church of The Final Judgment - ScripturesDocument132 pagesThe Process, Church of The Final Judgment - Scripturescirclesphere100% (2)
- Fundamentals of Thermodynamics Solutions ch11Document173 pagesFundamentals of Thermodynamics Solutions ch11Cierré No'Middlename Jones88% (8)
- Fundamentals of Thermodynamics 9th Edition ch14Document168 pagesFundamentals of Thermodynamics 9th Edition ch14Cierré No'Middlename Jones50% (4)
- The Emerald Tablets of Thoth Toth The Atlantean - Table 05Document5 pagesThe Emerald Tablets of Thoth Toth The Atlantean - Table 05Georgiana BealcuNo ratings yet
- IndictmentDocument2 pagesIndictmentCBS Austin WebteamNo ratings yet
- Explanation of Maxon EC Motor TerminologyDocument1 pageExplanation of Maxon EC Motor TerminologyfurkanfurkanfurkanNo ratings yet
- Explanation of the technical specifications and dimensions of DC motorsDocument1 pageExplanation of the technical specifications and dimensions of DC motorsRatanieriNo ratings yet
- Maxon EC90 Flat 90wattDocument1 pageMaxon EC90 Flat 90wattElectromateNo ratings yet
- Drive CurveDocument15 pagesDrive CurvemhcfldmewfbjcnwzjNo ratings yet
- General Motor Terminology GuideDocument11 pagesGeneral Motor Terminology GuideNurulHardyNo ratings yet
- Web Motor GlossaryDocument7 pagesWeb Motor GlossaryansabhiNo ratings yet
- Temperature Effects On DC Motor Performance 1Document10 pagesTemperature Effects On DC Motor Performance 1BabuNo ratings yet
- Temperature Effects On DC Motor Performance 1 PDFDocument10 pagesTemperature Effects On DC Motor Performance 1 PDFD RajeshNo ratings yet
- PMdrives Part2Document24 pagesPMdrives Part2leo232No ratings yet
- 20 MW Project Configuration Turbine Generator ParametersDocument33 pages20 MW Project Configuration Turbine Generator ParametersVivekKajlaNo ratings yet
- Maxon RE25 Precious Metal Brushes 10wattDocument1 pageMaxon RE25 Precious Metal Brushes 10wattElectromateNo ratings yet
- ABB Technical Guide No.7 REVCDocument40 pagesABB Technical Guide No.7 REVCelectrical_1012000No ratings yet
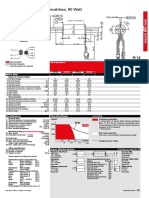
- Maxon EC22 50wattDocument1 pageMaxon EC22 50wattElectromateNo ratings yet
- Maxon EC60 400wattDocument1 pageMaxon EC60 400wattElectromateNo ratings yet
- BMD Permanent Magnet AC Synchronous Motors - ENG - R03 - 0 PDFDocument70 pagesBMD Permanent Magnet AC Synchronous Motors - ENG - R03 - 0 PDFHữu Thịnh ĐỗNo ratings yet
- Electrical Basic KnowledgeDocument10 pagesElectrical Basic Knowledgetushar shindeNo ratings yet
- MAXON BLDC As GeneratorsDocument14 pagesMAXON BLDC As GeneratorsRadu BabauNo ratings yet
- 90mm EC Brushless MotorDocument1 page90mm EC Brushless MotorLucas SuplinoNo ratings yet
- EfficiencyDocument1 pageEfficiencyNaveed NazirNo ratings yet
- Experimental Studies of Series-Resonant Inverters Using PDM For Induction Hardening ApplicationsDocument6 pagesExperimental Studies of Series-Resonant Inverters Using PDM For Induction Hardening Applicationsvijay patilNo ratings yet
- Datasheet TachogeneratorDocument4 pagesDatasheet TachogeneratorNurulHidayatNo ratings yet
- Improved Sensorless Control With The ST62 MCU For Universal MotorDocument22 pagesImproved Sensorless Control With The ST62 MCU For Universal MotorsameermuhammadfarooqNo ratings yet
- RE 50 50mm Graphite Brushes 200W MotorDocument1 pageRE 50 50mm Graphite Brushes 200W MotorJorge Alejandro Barrutia BorbollaNo ratings yet
- RE50Document1 pageRE50Yhony Gamarra VargasNo ratings yet
- Maxon EC-Powermax30 200wattDocument1 pageMaxon EC-Powermax30 200wattElectromateNo ratings yet
- 30 MM, Graphite Brushes, 60 Watt: Order NumberDocument1 page30 MM, Graphite Brushes, 60 Watt: Order NumberRatanieriNo ratings yet
- Graphite Brushes, 60 Watt Maxon DC MotorDocument1 pageGraphite Brushes, 60 Watt Maxon DC MotorRatanieriNo ratings yet
- Maxon A-Max26 Precious Metal Brushes 7wattDocument1 pageMaxon A-Max26 Precious Metal Brushes 7wattElectromateNo ratings yet
- Lect - 39 - 40 - Power Electronic Control of IM MotorsDocument18 pagesLect - 39 - 40 - Power Electronic Control of IM MotorsVishal MeghwarNo ratings yet
- Maxon EC6 1.2wattDocument1 pageMaxon EC6 1.2wattElectromateNo ratings yet
- A High Frequency Modular Resonant Converter For The Induction HeatingDocument7 pagesA High Frequency Modular Resonant Converter For The Induction HeatingŽarko DačevićNo ratings yet
- Maxon EC22 50watt SterilisableDocument1 pageMaxon EC22 50watt SterilisableElectromateNo ratings yet
- Maxon RE30 Graphite Brushes 60wattDocument1 pageMaxon RE30 Graphite Brushes 60wattElectromateNo ratings yet
- Maxon EC22 20watt Integrated ElectronicsDocument2 pagesMaxon EC22 20watt Integrated ElectronicsElectromateNo ratings yet
- RE 25 25 MM, Precious Metal Brushes CLL, 10 Watt: Part NumbersDocument1 pageRE 25 25 MM, Precious Metal Brushes CLL, 10 Watt: Part NumbersWALTER ANDRES CORDOBA CACERENo ratings yet
- Evs27 200013Document7 pagesEvs27 200013Trần Tấn LộcNo ratings yet
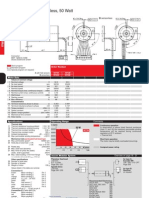
- Maxon EC-Max40 70wattDocument1 pageMaxon EC-Max40 70wattElectromateNo ratings yet
- Maxon EC-Max16 5wattDocument1 pageMaxon EC-Max16 5wattElectromateNo ratings yet
- Maxon EC-Max22 25wattDocument1 pageMaxon EC-Max22 25wattElectromateNo ratings yet
- GeneratorDocument4 pagesGeneratorगुंजन सिन्हाNo ratings yet
- Maxon RE50 Graphite Brushes 200wattDocument1 pageMaxon RE50 Graphite Brushes 200wattElectromateNo ratings yet
- Solid State Induction Motors DrivesDocument36 pagesSolid State Induction Motors DrivesRakesh MandalNo ratings yet
- Torque vs Speed Curves for Motor Designs N and HDocument14 pagesTorque vs Speed Curves for Motor Designs N and HTrungPhamNo ratings yet
- Maxon EC90 Flat 90watt With EncoderDocument1 pageMaxon EC90 Flat 90watt With EncoderElectromateNo ratings yet
- Current Rating For SemiconductorsDocument8 pagesCurrent Rating For SemiconductorsAnonymous akwRljJvYNo ratings yet
- How To Select A DC MotorDocument4 pagesHow To Select A DC MotorMehdi RabbaniNo ratings yet
- EC 40 40 MM, Brushless, 170 Watt: Part NumbersDocument1 pageEC 40 40 MM, Brushless, 170 Watt: Part NumbersfurkanfurkanfurkanNo ratings yet
- ECE 476 Power System Protection and Transient StabilityDocument31 pagesECE 476 Power System Protection and Transient Stabilitypop papNo ratings yet
- Motor Maxon 323772Document1 pageMotor Maxon 323772Henry Daniel VerdugoNo ratings yet
- EC-max 30 ∅30 mm, brushless, 60 Watt motor specsDocument1 pageEC-max 30 ∅30 mm, brushless, 60 Watt motor specsfurkanfurkanfurkanNo ratings yet
- Maxon RE-Max17 Graphite Brushes 4.5wattDocument2 pagesMaxon RE-Max17 Graphite Brushes 4.5wattElectromateNo ratings yet
- Calculate motor braking for regenerative applicationsDocument3 pagesCalculate motor braking for regenerative applicationsgafscottNo ratings yet
- Influence of System Parameters Using Fuse Protection of Regenerative DC DrivesFrom EverandInfluence of System Parameters Using Fuse Protection of Regenerative DC DrivesNo ratings yet
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1From EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1Rating: 2.5 out of 5 stars2.5/5 (3)
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2From EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2No ratings yet
- Simulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetFrom EverandSimulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetRating: 2 out of 5 stars2/5 (1)
- Simulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetFrom EverandSimulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetNo ratings yet
- Program Instructions REV A VER 5.14 and Up 3-27-14Document93 pagesProgram Instructions REV A VER 5.14 and Up 3-27-14Deya OstriaNo ratings yet
- Curtis Controller Wiring Schematics for Single or Dual Motor On-Road Vehicle ConversionsDocument18 pagesCurtis Controller Wiring Schematics for Single or Dual Motor On-Road Vehicle ConversionsDeya OstriaNo ratings yet
- 1239E Data SheetDocument4 pages1239E Data SheetDeya OstriaNo ratings yet
- Brushless DC (BLDC) Motor FundamentalsDocument20 pagesBrushless DC (BLDC) Motor FundamentalsEdo007100% (1)
- BDocument46 pagesBVijayenthiran SubramaniamNo ratings yet
- A Review On The Key Issues For Lithium-Ion Battery Management in Electric VehiclesDocument17 pagesA Review On The Key Issues For Lithium-Ion Battery Management in Electric VehiclesDeya OstriaNo ratings yet
- Fundamentals of Thermodynamics Solutions ch13Document157 pagesFundamentals of Thermodynamics Solutions ch13Cierré No'Middlename Jones100% (8)
- Fundamentals of Thermodynamics Solutions ch12Document156 pagesFundamentals of Thermodynamics Solutions ch12Cierré No'Middlename Jones100% (8)
- Contingency Screening For Steady State Security Analysis by UsinDocument6 pagesContingency Screening For Steady State Security Analysis by UsinDeya OstriaNo ratings yet
- A Regenerative Braking Control Strategy For ElectricDocument6 pagesA Regenerative Braking Control Strategy For ElectricErasmo Israel Garcia OchoaNo ratings yet
- Brushless DC (BLDC) Motor FundamentalsDocument20 pagesBrushless DC (BLDC) Motor FundamentalsEdo007100% (1)
- Control Strategy of Regenerative Braking System in Electric VehiclesDocument6 pagesControl Strategy of Regenerative Braking System in Electric VehiclesDeya OstriaNo ratings yet
- Brushless DC (BLDC) Motor FundamentalsDocument20 pagesBrushless DC (BLDC) Motor FundamentalsEdo007100% (1)
- Brushless DC (BLDC) Motor FundamentalsDocument20 pagesBrushless DC (BLDC) Motor FundamentalsEdo007100% (1)
- Driver Motor BrushlesDocument48 pagesDriver Motor BrushlesGONAJ2008No ratings yet
- Acute Pain - Mastectomy - Breast CADocument2 pagesAcute Pain - Mastectomy - Breast CAAngie MandeoyaNo ratings yet
- ReviewerDocument2 pagesReviewerFrank Jomari MurilloNo ratings yet
- Small Cells 2013 BrochuresDocument22 pagesSmall Cells 2013 BrochuresChungwa ChanjiNo ratings yet
- Computer Education ModuleDocument22 pagesComputer Education ModuleJulia Melissa CzapNo ratings yet
- Operating - System - Concepts - Essentials8thed - CH 6 SolutionDocument2 pagesOperating - System - Concepts - Essentials8thed - CH 6 SolutionAmirreza Saheb FosoulNo ratings yet
- A Review of Cyber-Physical System Research Relevant To The Emerging It Trends: Industry 4.0, Iot, Big Data, and Cloud ComputingDocument22 pagesA Review of Cyber-Physical System Research Relevant To The Emerging It Trends: Industry 4.0, Iot, Big Data, and Cloud ComputingFleetNo ratings yet
- E32-433T30D User Manual: Sx1278 433Mhz 1W Dip Wireless ModuleDocument22 pagesE32-433T30D User Manual: Sx1278 433Mhz 1W Dip Wireless ModuleSergey SevruginNo ratings yet
- Gardening Tool Identification QuizDocument3 pagesGardening Tool Identification Quizcaballes.melchor86No ratings yet
- WB City GateDocument7 pagesWB City GateDiegoNo ratings yet
- Build a Homebrew Pre-Amplified MicrophoneDocument3 pagesBuild a Homebrew Pre-Amplified MicrophoneMacario Imbudo BukatotNo ratings yet
- Footing BiaxialDocument33 pagesFooting BiaxialSanthoshkumar RayavarapuNo ratings yet
- DSBV87ALP Two-Stage Differential Pressure Control Valve SpecsDocument2 pagesDSBV87ALP Two-Stage Differential Pressure Control Valve SpecsadrianioantomaNo ratings yet
- Ase Utra Military and Law Enforcement ProductsDocument12 pagesAse Utra Military and Law Enforcement ProductsjamesfletcherNo ratings yet
- Oukfxu DH Lwpuk Ladyu@Izs'K.K GSRQ Izns"K LRJ Ij MRRJNK H Ysoy 1) 2, Oa 3 LRJ Ds VF/KDKFJ Ksa Ds Leidz LWDocument12 pagesOukfxu DH Lwpuk Ladyu@Izs'K.K GSRQ Izns"K LRJ Ij MRRJNK H Ysoy 1) 2, Oa 3 LRJ Ds VF/KDKFJ Ksa Ds Leidz LWNishant KumarNo ratings yet
- Wall Mounted Wireless Air ConditionersDocument2 pagesWall Mounted Wireless Air ConditionerspenavicbNo ratings yet
- Brazed Tool ArDocument5 pagesBrazed Tool ArRoni MustafiqNo ratings yet
- Taylor Ebooks 4 Web 0218Document360 pagesTaylor Ebooks 4 Web 0218aquahellNo ratings yet
- Vdocuments - MX - Control Systems by Nagrath Gopal Solution Manual PDFDocument128 pagesVdocuments - MX - Control Systems by Nagrath Gopal Solution Manual PDFPriyadarshini SahooNo ratings yet
- L1 Finding Nemo Teacher Notes American EnglishDocument9 pagesL1 Finding Nemo Teacher Notes American Englishcris_simescuNo ratings yet
- Review of oxidative stress and antioxidants in dentistryDocument4 pagesReview of oxidative stress and antioxidants in dentistrySeeptianMaulanaNo ratings yet
- 8-Input Multiplexer Selects One of Eight InputsDocument3 pages8-Input Multiplexer Selects One of Eight InputsKang RoyNo ratings yet
- The Task of 5-Axis Milling PDFDocument4 pagesThe Task of 5-Axis Milling PDFManikanda PrabhucNo ratings yet
- Namma Kalvi 12th Maths Book Back 1 Mark Questions em 216251Document29 pagesNamma Kalvi 12th Maths Book Back 1 Mark Questions em 21625111B CHARAN ANANDNo ratings yet
- Incremental and Newton Methods Lab ReportDocument10 pagesIncremental and Newton Methods Lab ReportAbde RrahimNo ratings yet
- Ymfc Al SetupDocument18 pagesYmfc Al SetupredaNo ratings yet
- AEIOU Framework - Case Study On Agriculture Domain (Automatic Drip Tube Irrigation System)Document30 pagesAEIOU Framework - Case Study On Agriculture Domain (Automatic Drip Tube Irrigation System)Kunal TalegaonkarNo ratings yet
- 2004 Big Bay Dam Failure in MississippiDocument62 pages2004 Big Bay Dam Failure in MississippianaNo ratings yet