You might also like
- Tables of The Legendre Functions P—½+it(x): Mathematical Tables SeriesFrom EverandTables of The Legendre Functions P—½+it(x): Mathematical Tables SeriesNo ratings yet
- Fourier Transforms PDFDocument30 pagesFourier Transforms PDFKavibharath RNo ratings yet
- Differentiability 9dec22 ShortDocument121 pagesDifferentiability 9dec22 ShortSathvikreddy vavilalaNo ratings yet
- Tutorial Topic 1 (1-10)Document10 pagesTutorial Topic 1 (1-10)fatin HumairaNo ratings yet
- 189 Sample-ChapterDocument13 pages189 Sample-ChapterMOHD ASIF ALINo ratings yet
- Chapter 1Document21 pagesChapter 12021868564No ratings yet
- Euler Lagrange Differental Equation: TopicDocument12 pagesEuler Lagrange Differental Equation: TopicTapash BasakNo ratings yet
- DifferentiationDocument26 pagesDifferentiationmazayaNo ratings yet
- Chapter 4 Multivariable FunctionsDocument48 pagesChapter 4 Multivariable FunctionsAnonymous hJMbZT7UCsNo ratings yet
- Solving PDE and ODE by Using Fourier Transform: AbstractDocument9 pagesSolving PDE and ODE by Using Fourier Transform: AbstractsantoshNo ratings yet
- 4.4 DirectionalDocument29 pages4.4 DirectionalChoa Pei ShuangNo ratings yet
- 1430497789comparative Static Analysis of General Function ModelsDocument8 pages1430497789comparative Static Analysis of General Function ModelsKudakwashe RuzvidzoNo ratings yet
- Fourier Transform TransformationsDocument25 pagesFourier Transform TransformationsSalahuddin JokhioNo ratings yet
- Lec8 Discrete Fourier TransformDocument28 pagesLec8 Discrete Fourier TransformIqrakhanNo ratings yet
- Chapter 2 DerivativesDocument84 pagesChapter 2 Derivativestom808954No ratings yet
- Advanced Fourier Eng+ItaDocument46 pagesAdvanced Fourier Eng+ItaLeonardo RubinoNo ratings yet
- Unit 4 Fourier Transforms Lecture Notes PDFDocument30 pagesUnit 4 Fourier Transforms Lecture Notes PDFpoojaabanindran100% (1)
- Chapter 4 Multivariable FunctionsDocument48 pagesChapter 4 Multivariable Functionssofea anuarNo ratings yet
- Lecture Notes IIIDocument7 pagesLecture Notes IIIyashb067No ratings yet
- A Few Exact Sampling TechniquesDocument7 pagesA Few Exact Sampling TechniquesBenett555gggNo ratings yet
- On Digital Filters+Fourier Laplace Z FFT Eng+ItaDocument68 pagesOn Digital Filters+Fourier Laplace Z FFT Eng+ItaLeonardo RubinoNo ratings yet
- F F A A X y F F A I A X Y: Basic Properties of Differentiable FunctionsDocument15 pagesF F A A X y F F A I A X Y: Basic Properties of Differentiable Functionsab4azizNo ratings yet
- Chapter 2 - Lecture - Differentiation of Algebraic FunctionsDocument7 pagesChapter 2 - Lecture - Differentiation of Algebraic Functionsrussell valinoNo ratings yet
- The Fourier Transform: Jean Baptiste Joseph FourierDocument22 pagesThe Fourier Transform: Jean Baptiste Joseph FourierAbhinav_Batish_1810No ratings yet
- VariationDocument30 pagesVariationLazhar DhaouadiNo ratings yet
- Osgood Uniqueness TheoremDocument5 pagesOsgood Uniqueness TheoremZPratt StarkNo ratings yet
- MATH0043 2 - Calculus of VariationsDocument9 pagesMATH0043 2 - Calculus of VariationsYuen MokNo ratings yet
- Y (X), F (T) - in Practical Applications, However, Quantities of Interest Are, X, X, X, X, X, X, X, X, X)Document8 pagesY (X), F (T) - in Practical Applications, However, Quantities of Interest Are, X, X, X, X, X, X, X, X, X)vaibhav shahNo ratings yet
- Chapter 3 - Vector Differentiation, 2010Document11 pagesChapter 3 - Vector Differentiation, 2010mohamed fanouchNo ratings yet
- Calc3 Chapter3Document11 pagesCalc3 Chapter3Roy VeseyNo ratings yet
- Ma6351 Unit IV Fourier TransformsDocument30 pagesMa6351 Unit IV Fourier Transformssatheeshsep24No ratings yet
- Lecture Week14Document4 pagesLecture Week14Tahzeeb AhmedNo ratings yet
- Corrections To The Wu-Sprung Potential For The Hamiltonian Whose Eigenvalues Are Precisely The Nontrivial Zeros of The Riemann Zeta Function.Document9 pagesCorrections To The Wu-Sprung Potential For The Hamiltonian Whose Eigenvalues Are Precisely The Nontrivial Zeros of The Riemann Zeta Function.Jose Javier GarciaNo ratings yet
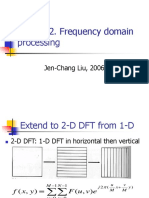
- Chap 4-2. Frequency Domain Processing: Jen-Chang Liu, 2006Document51 pagesChap 4-2. Frequency Domain Processing: Jen-Chang Liu, 2006Ashfiya ThahirNo ratings yet
- Section13 8Document10 pagesSection13 8rozemathNo ratings yet
- Chapter 5: Functio Ns of Several Vari AblesDocument94 pagesChapter 5: Functio Ns of Several Vari AblesAli HassenNo ratings yet
- EXercise 16.6Document11 pagesEXercise 16.6MOHAMMED ALI MOHAMMED ZABBANINo ratings yet
- Tutorial Exercise 3Document3 pagesTutorial Exercise 3BelaynewNo ratings yet
- Class NoteDocument80 pagesClass NoteKazi prantoNo ratings yet
- Fourier TNSFRM BookletDocument18 pagesFourier TNSFRM BookletGeosemsemNo ratings yet
- Finite DifferenceDocument19 pagesFinite DifferenceHanshamNo ratings yet
- Appendix FourierDocument5 pagesAppendix FourierSupriya DuttaNo ratings yet
- 2024cal L4 NoteDocument23 pages2024cal L4 Notepotato20040927No ratings yet
- Linear Transformations: M N M NDocument12 pagesLinear Transformations: M N M NMitz Lorraine ZambranoNo ratings yet
- ENG 233 Lecture Notes 4Document7 pagesENG 233 Lecture Notes 4David Mitry ThomasNo ratings yet
- A Convexity Minimization of Function Subject To Constraints 2005 The Mechanics of Constitutive ModelingDocument8 pagesA Convexity Minimization of Function Subject To Constraints 2005 The Mechanics of Constitutive ModelingRINH PHAMNo ratings yet
- II. Bar Element: Consider A Uniform Prismatic Bar: U U A, EDocument9 pagesII. Bar Element: Consider A Uniform Prismatic Bar: U U A, ENadher Al-BaghdadiNo ratings yet
- Function NotesDocument16 pagesFunction NotesAnkit PooniaNo ratings yet
- Implicit Functions and Diffeomorphisms Without C1Document32 pagesImplicit Functions and Diffeomorphisms Without C1Isaque CamposNo ratings yet
- Module-19-Partial DifferentiationDocument10 pagesModule-19-Partial DifferentiationMichiko Calamba-gandahanNo ratings yet
- Chap 4Document9 pagesChap 4Jane NdindaNo ratings yet
- Math 163 11.7 Second Derivative Tests: X y XX Yy XyDocument2 pagesMath 163 11.7 Second Derivative Tests: X y XX Yy XyClement KipyegonNo ratings yet
- L6 FourierDocument38 pagesL6 FourierAgha KazimNo ratings yet
- A Discrete Wavelet Analysis of Freak Waves in The Ocean: Received 25 June 2003 and in Revised Form 7 June 2004Document17 pagesA Discrete Wavelet Analysis of Freak Waves in The Ocean: Received 25 June 2003 and in Revised Form 7 June 2004Nayaka AnngerNo ratings yet
- Problem40 57Document1 pageProblem40 57IENCSNo ratings yet
- Image Restoration 2Document25 pagesImage Restoration 2A JNo ratings yet
- 6 Characteristic Function 1974 A Course in Probability TheoryDocument54 pages6 Characteristic Function 1974 A Course in Probability TheoryGramm ChaoNo ratings yet
- Lecture 7Document4 pagesLecture 7Iddresia MughalNo ratings yet
- U1 Finite DifferencesDocument57 pagesU1 Finite DifferencesAnushka BhaveNo ratings yet
- Chapter 4 Multivariable Function and Its DifferentiationDocument10 pagesChapter 4 Multivariable Function and Its DifferentiationAmru ZulNo ratings yet
- Fe Formulation For 1D Heat Transfer (From Gde)Document9 pagesFe Formulation For 1D Heat Transfer (From Gde)Amit KashyapNo ratings yet
- Goodyear Company Chicago,: PiccoliDocument11 pagesGoodyear Company Chicago,: PiccoliAmit KashyapNo ratings yet
- Potential Energy Approach (Rayleigh Ritz Method)Document16 pagesPotential Energy Approach (Rayleigh Ritz Method)Amit KashyapNo ratings yet
- Potential Energy Method: BasedDocument8 pagesPotential Energy Method: BasedAmit KashyapNo ratings yet
- Kunal PPT Jumbo DrillDocument37 pagesKunal PPT Jumbo DrillAmit KashyapNo ratings yet
- Fe Formulation For Structural 1D Bar (Subjected To Axial Loading)Document5 pagesFe Formulation For Structural 1D Bar (Subjected To Axial Loading)Amit KashyapNo ratings yet
- B.tech Mining Engg.Document42 pagesB.tech Mining Engg.Amit KashyapNo ratings yet
- 37 Flame Prooff Enclosure by TKC PageDocument6 pages37 Flame Prooff Enclosure by TKC PageAmit KashyapNo ratings yet
- Shiv Tandav Stotram Lyrics: EnglishDocument4 pagesShiv Tandav Stotram Lyrics: EnglishAmit KashyapNo ratings yet
- Technicalcampus: SingiiDocument1 pageTechnicalcampus: SingiiAmit KashyapNo ratings yet
- Technicalcampus: SingiiDocument1 pageTechnicalcampus: SingiiAmit KashyapNo ratings yet
- TransformerDocument24 pagesTransformerMuhammad MamoonNo ratings yet
- T Ffi. Ri, I Ffi: Ffiqriilft @SRFDocument4 pagesT Ffi. Ri, I Ffi: Ffiqriilft @SRFRohit SahuNo ratings yet
- Syllabus PHD Interview 2020Document20 pagesSyllabus PHD Interview 2020Amit KashyapNo ratings yet
- Moment of Inertia Spinner Lesson Plan: Amount of Time Demo Takes: MaterialsDocument3 pagesMoment of Inertia Spinner Lesson Plan: Amount of Time Demo Takes: MaterialsAmit KashyapNo ratings yet
- New Lab CostDocument13 pagesNew Lab CostAmit KashyapNo ratings yet
- CAD Lab Viva QuestionsDocument9 pagesCAD Lab Viva Questionspavanrane60% (5)
- Jumping EventsDocument1 pageJumping EventsAmit KashyapNo ratings yet
- RacDocument1 pageRacAmit KashyapNo ratings yet
- RacDocument1 pageRacAmit KashyapNo ratings yet
- Line 04Document55 pagesLine 04Amit KashyapNo ratings yet
- B.Tech Civil Syllabus - New PDFDocument247 pagesB.Tech Civil Syllabus - New PDFbharathiNo ratings yet
- Or Mech7th SemDocument1 pageOr Mech7th SemAmit KashyapNo ratings yet
- Jumping Events: Mr. Amit Kumar, Mrs. Smita Kumara (Asst. Professor) (Asst. Professor)Document1 pageJumping Events: Mr. Amit Kumar, Mrs. Smita Kumara (Asst. Professor) (Asst. Professor)Amit KashyapNo ratings yet
- Geometric Modelling Projection Systems: Engineering Communications GL2Document20 pagesGeometric Modelling Projection Systems: Engineering Communications GL2Amit KashyapNo ratings yet
- En Iso 19036Document16 pagesEn Iso 19036Sharad JoshiNo ratings yet
- Curriculum Vitae Personal Details: Mitic NadezdaDocument3 pagesCurriculum Vitae Personal Details: Mitic NadezdaNadežda MitićNo ratings yet
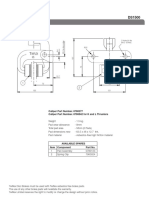
- Series Al5000 Light Tower: Operation/Service & Parts ManualDocument64 pagesSeries Al5000 Light Tower: Operation/Service & Parts ManualJovanNo ratings yet
- FB156Document14 pagesFB156Hoangvinh DuongNo ratings yet
- 247248-The Histiry and Culture of The Indian People, The Vedic Age Vol I - DjvuDocument620 pages247248-The Histiry and Culture of The Indian People, The Vedic Age Vol I - DjvuDeja ImagenationNo ratings yet
- Edukasyon Sa Pagpapakatao 6 q1w4Document26 pagesEdukasyon Sa Pagpapakatao 6 q1w4Juliet Del RosarioNo ratings yet
- Lesson 2Document10 pagesLesson 2Anore James IvanNo ratings yet
- Ab 521 Requirements For Engineered Pressure EnclosuresDocument39 pagesAb 521 Requirements For Engineered Pressure EnclosuresCarlos Maldonado SalazarNo ratings yet
- BargeboardsDocument1 pageBargeboardsDavid O'MearaNo ratings yet
- Sample Midterm (Lab)Document3 pagesSample Midterm (Lab)Shahab designerNo ratings yet
- Seminar Topic On Compuetr ForensicsDocument11 pagesSeminar Topic On Compuetr ForensicsS17IT1207Hindu Madhavi100% (1)
- MS Word Basics GuideDocument36 pagesMS Word Basics GuideCarmen NelNo ratings yet
- How To Automatically Backup phpMyAdmin - SQLBackupAndFTP's BlogDocument6 pagesHow To Automatically Backup phpMyAdmin - SQLBackupAndFTP's BlogIbn KhaledNo ratings yet
- OM Appendix 3D Diamond DA40NG Flight Operations ManualDocument123 pagesOM Appendix 3D Diamond DA40NG Flight Operations ManualBekhzod ArtygaliyevNo ratings yet
- Atc Investor Relations U.S. Technology and 5g Update q4 2020Document35 pagesAtc Investor Relations U.S. Technology and 5g Update q4 2020Valtteri ItärantaNo ratings yet
- 2190 9172 9172A Inst InstrDocument4 pages2190 9172 9172A Inst InstrDushantha RoshanNo ratings yet
- Netelastic VBNG Manager Installation GuideDocument11 pagesNetelastic VBNG Manager Installation GuideKhaing myal HtikeNo ratings yet
- Carrier AggregationDocument40 pagesCarrier Aggregationmonel_24671No ratings yet
- Elektor Electronics 1998-10Document54 pagesElektor Electronics 1998-10Adrian_Andrei_4433No ratings yet
- Purposive Communication AssignmentDocument2 pagesPurposive Communication AssignmentJohn Warren MestiolaNo ratings yet
- MS Disc Brake CaliperDocument2 pagesMS Disc Brake Caliperghgh140No ratings yet
- Gen Set Controller GC 1f 2Document13 pagesGen Set Controller GC 1f 2Luis Campagnoli100% (2)
- Basic Passport Checks: Cyan Magenta BlackDocument23 pagesBasic Passport Checks: Cyan Magenta BlackRakesh KanniNo ratings yet
- Jyotshana NewaDocument53 pagesJyotshana NewaInternship ReportNo ratings yet
- Sperry BM E S Band Scanner Tech SpecDocument2 pagesSperry BM E S Band Scanner Tech SpecBeto GallardoNo ratings yet
- Java Lab RecordDocument29 pagesJava Lab RecordCyberDootNo ratings yet
- Two Day Workshop On: Embedded Systems Design Using ARDUINO BoardsDocument2 pagesTwo Day Workshop On: Embedded Systems Design Using ARDUINO BoardsBritto Ebrington AjayNo ratings yet
- SSP PP05 Production ExecutionDocument13 pagesSSP PP05 Production ExecutionArpit AgrawalNo ratings yet
- STS Lesson 2Document3 pagesSTS Lesson 2Carl Angelo MahaitNo ratings yet
- Emhart Inspection Defect GuideDocument1 pageEmhart Inspection Defect GuideBryan Nadimpally75% (4)