You might also like
- Laporan Latihan Industri JKRDocument174 pagesLaporan Latihan Industri JKRSyahid Muhammad85% (13)
- Engineering Analysis On Spreader Beam by Using Manual Calculation and Solidworks Simulation SoftwareDocument24 pagesEngineering Analysis On Spreader Beam by Using Manual Calculation and Solidworks Simulation SoftwareNguyen ThangNo ratings yet
- DMD 3143 Nota Elektrik Power SteeringDocument16 pagesDMD 3143 Nota Elektrik Power Steeringzero80% (5)
- FolioDocument10 pagesFolioKeiichi AbqoriNo ratings yet
- Kertas Penerangan 1 - 5Document10 pagesKertas Penerangan 1 - 5mark wellNo ratings yet
- Turbo ChargeDocument18 pagesTurbo ChargeRezuan AzamanNo ratings yet
- RPT SKM18Document15 pagesRPT SKM18Batangan JamboreeNo ratings yet
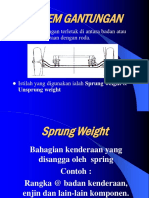
- Sistem Gantungan (Power Point)Document18 pagesSistem Gantungan (Power Point)ابو حنيف100% (1)
- RSL Mak7Document5 pagesRSL Mak7W Mohd Fauzi WamNo ratings yet
- Sistem Penghantaran KuasaDocument9 pagesSistem Penghantaran KuasaZowl SaidinNo ratings yet
- Siste Gantungan CompleteDocument8 pagesSiste Gantungan CompleteSharizal SanikNo ratings yet
- Contoh Penilaian Kertas Kerja (Amali) Persijilan SKMDocument9 pagesContoh Penilaian Kertas Kerja (Amali) Persijilan SKMShahrizan abdul rahmanNo ratings yet
- Drive ShaftDocument26 pagesDrive ShaftSyahrul AminNo ratings yet
- Folio STERENG ELEKTRIKDocument8 pagesFolio STERENG ELEKTRIKHazwan YusriNo ratings yet
- KERTAS KERJA Modifikasi CharlieDocument14 pagesKERTAS KERJA Modifikasi CharlieI-Mechy UitmppNo ratings yet
- Perancangan Sistem KemudiDocument5 pagesPerancangan Sistem Kemudiaphiphatur rahmanNo ratings yet
- Pneumatik 1Document29 pagesPneumatik 1Norbakyah Rich GoldNo ratings yet
- Brake System 1Document20 pagesBrake System 1Nadhirah Joha50% (2)
- Hidrogen MalaysiaDocument95 pagesHidrogen MalaysiaSukmanto dibyoNo ratings yet
- Tri - Wheel TrolleyDocument31 pagesTri - Wheel TrolleyS. ThivyanNo ratings yet
- Nota Kursus 1: Kementerian Pendidikan MalaysiaDocument24 pagesNota Kursus 1: Kementerian Pendidikan MalaysiaAmmar AminuddinNo ratings yet
- Tilakiswaran Anak Lelaki SamurgamDocument24 pagesTilakiswaran Anak Lelaki SamurgamIrfan Dekna AlyaNo ratings yet
- 1615071015-Bab 1 PendahuluanDocument7 pages1615071015-Bab 1 PendahuluanPutra SatriaNo ratings yet
- Pentaksiran TeoriDocument3 pagesPentaksiran TeoriAris Munandar100% (2)
- YusnitaDocument174 pagesYusnitaYaasheikh PdmNo ratings yet
- Choo Shinn Chei MMD2005 TTTDocument207 pagesChoo Shinn Chei MMD2005 TTTDimas Firmanda Al RizaNo ratings yet
- Report SV Hazanal Suzima LatestDocument49 pagesReport SV Hazanal Suzima Latestσяρн 侍No ratings yet
- Garis Panduan Rear DrawerDocument16 pagesGaris Panduan Rear Drawerafarz2604No ratings yet
- Report SV Hazanal SuzimaDocument51 pagesReport SV Hazanal Suzimaσяρн 侍No ratings yet
- B01 Sem4 As PDFDocument117 pagesB01 Sem4 As PDFmoktar100% (1)
- Institute of Professional Techniques and Skills: G452-002-2:2018 Light Vehicle Repair ServiceDocument27 pagesInstitute of Professional Techniques and Skills: G452-002-2:2018 Light Vehicle Repair ServiceIkmalHishamIsmailNo ratings yet
- Alatan Untuk Ukur HujanDocument284 pagesAlatan Untuk Ukur HujanNur Hidayah Zulkifli0% (1)
- Assignment Motor AUDocument18 pagesAssignment Motor AUkasturi ridzuan83% (12)
- Nota Kursus K01 NK-02-03Document30 pagesNota Kursus K01 NK-02-03Muhammad FathilNo ratings yet
- Penilaian Pengetahuan M06Document7 pagesPenilaian Pengetahuan M06PAUL KENNY TSHONG100% (3)
- TX 1Document5 pagesTX 1Firdaus Che NohNo ratings yet
- NOTAKURSUSMTA1033Document33 pagesNOTAKURSUSMTA1033Abdul Rahim Mohamed0% (1)
- 122333Document197 pages122333Kelvin Yip100% (1)
- Assignment 1 - Kertas CadanganDocument19 pagesAssignment 1 - Kertas Cadanganahmad_wazierNo ratings yet
- Penilaian Pengetahuan M10Document7 pagesPenilaian Pengetahuan M10PAUL KENNY TSHONGNo ratings yet
- DTE2352 Kawalan Motor ElektrikDocument7 pagesDTE2352 Kawalan Motor ElektrikASRAF M.RAHMATNo ratings yet
- p1 PLC - Christopher Roberto - 02311540000125Document33 pagesp1 PLC - Christopher Roberto - 02311540000125Christ PanjaitanNo ratings yet
- Traffic Light The Application of PLCDocument24 pagesTraffic Light The Application of PLCNadzirah SaniNo ratings yet
- Nota Kursus 1Document37 pagesNota Kursus 1Angelie LeonaNo ratings yet
- Sistem Lampu Isyarat Pintar-24 PagesDocument24 pagesSistem Lampu Isyarat Pintar-24 PagesAidiyani Smkb100% (1)
- Report 2Document11 pagesReport 2Nurshafikah Binti ZulkifliNo ratings yet
- Laporan KP - Sebelum KumpuleditDocument50 pagesLaporan KP - Sebelum KumpuleditHadi Witanta50% (2)
- Proposal Membina AtvDocument10 pagesProposal Membina AtvcheaNo ratings yet
- An Solar CarDocument10 pagesAn Solar Carhasl arbNo ratings yet
- Borang Pengesahan Status TesisDocument128 pagesBorang Pengesahan Status TesisJennyBillNo ratings yet
- Cikgu Anuar Sem4Document67 pagesCikgu Anuar Sem4mohamadsharafuddin_8No ratings yet
- PitchingDocument7 pagesPitchingSITI KHADIJAH BINTI IBRAHIM MoeNo ratings yet
- Laporan KP 2018 AhmDocument45 pagesLaporan KP 2018 AhmKhalidNo ratings yet
- CG - Azmi Nota Kursus 1 Kawalan MotorDocument53 pagesCG - Azmi Nota Kursus 1 Kawalan MotorNur AimanshorruddinNo ratings yet
- Bekc4873011415 Sistem Pintar & Kecerdikan Mesin Artificial IntelligenceDocument22 pagesBekc4873011415 Sistem Pintar & Kecerdikan Mesin Artificial IntelligencePeikee LeeNo ratings yet
- Pertandingan Kereta SolarDocument17 pagesPertandingan Kereta Solar'Izzuan NordinNo ratings yet
- Perkhidmatan BangunanDocument30 pagesPerkhidmatan BangunanMohd Taufik Bin Abd RashidNo ratings yet
- Laporan KP AndikaputraDocument78 pagesLaporan KP AndikaputraElgustaNo ratings yet
- Scope of Works PpuDocument1 pageScope of Works PpuosmaidaNo ratings yet
- Solar Car CompetitionDocument14 pagesSolar Car CompetitionNoor Sham YaakobNo ratings yet