You might also like
- D33007Document50 pagesD33007Cristian Cuello Bolaño100% (1)
- 1 2 3 4 5 CP 343-2 / CP 343-2 P AS-Interface Master Simatic NetDocument134 pages1 2 3 4 5 CP 343-2 / CP 343-2 P AS-Interface Master Simatic NetMike LeeNo ratings yet
- 20comm Um009 - en PDocument108 pages20comm Um009 - en Pjohnwu_2009No ratings yet
- Mvi56 Hart User ManualDocument171 pagesMvi56 Hart User ManualDanny SánchezNo ratings yet
- DP ASi Link 20E - en - 2008 08 - Manual - C79000 G8976 C235 01Document144 pagesDP ASi Link 20E - en - 2008 08 - Manual - C79000 G8976 C235 01Abdullah AlaaNo ratings yet
- OSCOP P V6.60 E50417-H1076-C170-A5 enDocument402 pagesOSCOP P V6.60 E50417-H1076-C170-A5 enRinda_RaynaNo ratings yet
- Acs Ip BasedDocument32 pagesAcs Ip BasedSharik KhanNo ratings yet
- 569122g1 Manual CodesysDocument87 pages569122g1 Manual Codesyskenshimm123456789No ratings yet
- 1756-EN2TSC User ManualDocument64 pages1756-EN2TSC User Manualjeevan.shanware2214No ratings yet
- AdvantisDocument126 pagesAdvantisSuperpagliaNo ratings yet
- Mvi56 LTQ User ManualDocument98 pagesMvi56 LTQ User ManualFlavio LimaNo ratings yet
- Actuator Sensor Interface LinkDocument160 pagesActuator Sensor Interface Linkjinalsinh1433No ratings yet
- Instalação CLP BoschDocument91 pagesInstalação CLP BoschSideparNo ratings yet
- ComCell Manual v3.5Document61 pagesComCell Manual v3.5Khanh HungNo ratings yet
- Mvi56 Mnet User Manual PDFDocument143 pagesMvi56 Mnet User Manual PDFHujiLokoNo ratings yet
- Opisane Funkcije Mitsubishi ProgManual For Beginners ManualDocument106 pagesOpisane Funkcije Mitsubishi ProgManual For Beginners ManualbekavacsNo ratings yet
- WEBPRO_PCPRO_Aspire System Data Communications ManualDocument314 pagesWEBPRO_PCPRO_Aspire System Data Communications Manualandrea.stella.luxNo ratings yet
- Scanport DeviceNet 2100 GK61Document175 pagesScanport DeviceNet 2100 GK61Dante Renee Mendoza DelgadoNo ratings yet
- Atmega TutorialDocument18 pagesAtmega Tutorialsaran2012No ratings yet
- Startup-Basic: User ManualDocument16 pagesStartup-Basic: User ManualVA MaintNo ratings yet
- Tia - Mto Adiopnu1 V1 0 2202usDocument56 pagesTia - Mto Adiopnu1 V1 0 2202usMiguel MayoNo ratings yet
- Melsec Q-Beginner's Manual 209093-A (08.07)Document170 pagesMelsec Q-Beginner's Manual 209093-A (08.07)pipikikikiNo ratings yet
- Allen Bradley Profibus-Dp Comm ModuleDocument56 pagesAllen Bradley Profibus-Dp Comm ModuleMarco De SaNo ratings yet
- MAINBOARD MANUAL P4M-865G MAX P4M-865PE ... - MaxdataDocument64 pagesMAINBOARD MANUAL P4M-865G MAX P4M-865PE ... - MaxdataevasiveNo ratings yet
- E3 and E3 Plus Solid-State Overload RelayDocument230 pagesE3 and E3 Plus Solid-State Overload RelayfabianNo ratings yet
- OMRON NT620S NT620C Operation ManualDocument338 pagesOMRON NT620S NT620C Operation Manualordense0% (1)
- Nonstandard Maintenance: Software NM:SWDocument151 pagesNonstandard Maintenance: Software NM:SWMokbelNo ratings yet
- 20-Comm-D Devicenet Adapter: User ManualDocument256 pages20-Comm-D Devicenet Adapter: User ManualAnderson Rios SilvaNo ratings yet
- Mitsubishi PLC - Linha - Q - User - Manual PDFDocument170 pagesMitsubishi PLC - Linha - Q - User - Manual PDFrafaeldesouzamartins100% (1)
- Spi 525Document35 pagesSpi 525Milena Novato SilvaNo ratings yet
- 1761 Device NetDocument100 pages1761 Device NetJorge MontanoNo ratings yet
- SIPROTEC Communication Module PNP3 IPDocument64 pagesSIPROTEC Communication Module PNP3 IPtan_bkNo ratings yet
- Plx32 Eip MBTCP Ua UmDocument153 pagesPlx32 Eip MBTCP Ua Umfrancisco fernandezNo ratings yet
- PLX8x EIP 61850 User ManualDocument184 pagesPLX8x EIP 61850 User ManualMarceloNo ratings yet
- WAVECOM EasySatUserManualDocument37 pagesWAVECOM EasySatUserManualM.A.TNo ratings yet
- Fx1s Fx1n Fx2n (C) Fx3u Beginner's ManualDocument0 pagesFx1s Fx1n Fx2n (C) Fx3u Beginner's ManualbryanaranzazuNo ratings yet
- 3170 MBS User Manual PDFDocument55 pages3170 MBS User Manual PDFnelson contrerasNo ratings yet
- C6-C64 PLC Interface ManualDocument342 pagesC6-C64 PLC Interface Manualsunhuynh100% (1)
- 574-771 4020 TSGDocument38 pages574-771 4020 TSGvayubitNo ratings yet
- MVI69 MNET User Manual PDFDocument159 pagesMVI69 MNET User Manual PDFsasanchez3No ratings yet
- Asantéfast 10/100: Pci Ethernet Adapter Installation GuideDocument40 pagesAsantéfast 10/100: Pci Ethernet Adapter Installation GuideMarcelo PchevuzinskeNo ratings yet
- Atmega TutorialDocument18 pagesAtmega TutorialEssel Jojo FlintNo ratings yet
- PROSOFT PLX8x EIP 61850 User ManualDocument167 pagesPROSOFT PLX8x EIP 61850 User Manualjuanjovm77No ratings yet
- GE Fanuc Micro PLC User's Guide, GFK-0803BDocument165 pagesGE Fanuc Micro PLC User's Guide, GFK-0803BJohan SneiderNo ratings yet
- PLX82-EIP-61850: User ManualDocument139 pagesPLX82-EIP-61850: User ManualIsaac MendibleNo ratings yet
- 3aua0000004591 RevdDocument32 pages3aua0000004591 RevdOrlandoNo ratings yet
- 20 Comm D Devicenet AdapterDocument256 pages20 Comm D Devicenet AdapterThiago DelmundeNo ratings yet
- Am37 MotherboardDocument54 pagesAm37 Motherboardrick_dye_1100% (1)
- 20comm Um004 - en PDocument122 pages20comm Um004 - en PlclsiNo ratings yet
- 1768 CompactLogix Quick StartDocument208 pages1768 CompactLogix Quick StartDaniel Ivan FernandezNo ratings yet
- 1769 DSI Modbus Comm ModuleDocument204 pages1769 DSI Modbus Comm ModuleThanh BaronNo ratings yet
- PowerFlex Remote I-O Adapter 20 COMM-RDocument122 pagesPowerFlex Remote I-O Adapter 20 COMM-RMario Duarte100% (1)
- 1747-UM003A-EN-P - July 2000Document140 pages1747-UM003A-EN-P - July 2000jesusortegavNo ratings yet
- Ethernet Adapter SPA-ZC 400 SPA-ZC 400: Installation and Commissioning ManualDocument52 pagesEthernet Adapter SPA-ZC 400 SPA-ZC 400: Installation and Commissioning ManualMelchor DavidNo ratings yet
- 103M PDPS User ManualDocument144 pages103M PDPS User ManualRavi VarmaNo ratings yet
- E3 and E3 Plus Solid-State Overload RelayDocument230 pagesE3 and E3 Plus Solid-State Overload Relaychaupha1No ratings yet
- PLC Programming from Novice to Professional: Learn PLC Programming with Training VideosFrom EverandPLC Programming from Novice to Professional: Learn PLC Programming with Training VideosRating: 5 out of 5 stars5/5 (1)
- Interfacing PIC Microcontrollers: Embedded Design by Interactive SimulationFrom EverandInterfacing PIC Microcontrollers: Embedded Design by Interactive SimulationNo ratings yet
- Programming Arduino Next Steps: Going Further with SketchesFrom EverandProgramming Arduino Next Steps: Going Further with SketchesRating: 3 out of 5 stars3/5 (3)
- #CAT Genset SizingDocument9 pages#CAT Genset SizingCyrix.OneNo ratings yet
- #Grace PESD's NFPA-70EDocument12 pages#Grace PESD's NFPA-70ECyrix.OneNo ratings yet
- Bearing Root Cause Failure Analysis - Per Arnold - BRCE2016 PDFDocument85 pagesBearing Root Cause Failure Analysis - Per Arnold - BRCE2016 PDFrfriosEP100% (1)
- Ctrl-Eng Micro-Motion 45yrsDocument16 pagesCtrl-Eng Micro-Motion 45yrsCyrix.OneNo ratings yet
- Generator Set Operator & Maintenance Instruction ManualDocument61 pagesGenerator Set Operator & Maintenance Instruction ManualAlejandro Salas VásquezNo ratings yet
- MM Pressure Regulator Catalogue - E (1) 015-PCV-588Document32 pagesMM Pressure Regulator Catalogue - E (1) 015-PCV-588Do PhanNo ratings yet
- #CAT Genset Overcurrent ProtectionDocument4 pages#CAT Genset Overcurrent ProtectionCyrix.OneNo ratings yet
- #GE-LM6K Sprint WTR Purity RequerimentsDocument5 pages#GE-LM6K Sprint WTR Purity RequerimentsCyrix.OneNo ratings yet
- CM20190529 6e8f4 E408f PDFDocument263 pagesCM20190529 6e8f4 E408f PDFJorge Luis Tanaka ConchaNo ratings yet
- #Boiler Cycling ConsiderationsDocument8 pages#Boiler Cycling ConsiderationsCyrix.OneNo ratings yet
- #Capstone ΜGT C30Document2 pages#Capstone ΜGT C30Cyrix.OneNo ratings yet
- #Boiler Tubes Failure - B&WDocument10 pages#Boiler Tubes Failure - B&WCyrix.OneNo ratings yet
- #Boiler Cycling ConsiderationsDocument8 pages#Boiler Cycling ConsiderationsCyrix.OneNo ratings yet
- #Boiler Tubes Failure - B&WDocument10 pages#Boiler Tubes Failure - B&WCyrix.OneNo ratings yet
- #Boiler Flow Measurement - SierraDocument9 pages#Boiler Flow Measurement - SierraCyrix.OneNo ratings yet
- Planejamento e CronogramasDocument4 pagesPlanejamento e CronogramasBruno Garcia Do AmaralNo ratings yet
- #Boiler Cycling ConsiderationsDocument8 pages#Boiler Cycling ConsiderationsCyrix.OneNo ratings yet
- #BN-Orbit60 Fact SheetDocument1 page#BN-Orbit60 Fact SheetCyrix.OneNo ratings yet
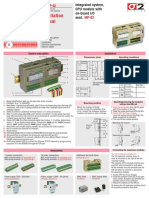
- Installation manual for CPU module with on-board I/ODocument6 pagesInstallation manual for CPU module with on-board I/OCyrix.OneNo ratings yet
- #Ascon AC3 Adv CTRL System - Ver.07Document160 pages#Ascon AC3 Adv CTRL System - Ver.07Cyrix.OneNo ratings yet
- CR16 TE1W: 1/ GeneralDocument3 pagesCR16 TE1W: 1/ GeneralPowerTechNo ratings yet
- Performance May Vary by CPU/APU. For More Details, Please Refer To The Specifications On Each Product PageDocument1 pagePerformance May Vary by CPU/APU. For More Details, Please Refer To The Specifications On Each Product PageAbduallah AmarNo ratings yet
- #Bray Trilok AdvantagesDocument2 pages#Bray Trilok AdvantagesCyrix.OneNo ratings yet
- #Alignment Guide - VibralignDocument280 pages#Alignment Guide - VibralignCyrix.OneNo ratings yet
- Performance May Vary by CPU/APU. For More Details, Please Refer To The Specifications On Each Product PageDocument1 pagePerformance May Vary by CPU/APU. For More Details, Please Refer To The Specifications On Each Product PageAbduallah AmarNo ratings yet
- 6 MistakesDocument6 pages6 MistakesHBracing1100% (1)
- Industrial Cybersecurity: Volume 2 - AprilDocument29 pagesIndustrial Cybersecurity: Volume 2 - AprilchandraNo ratings yet
- #ASUS AMD CrossHair VIII - HERODocument110 pages#ASUS AMD CrossHair VIII - HEROCyrix.OneNo ratings yet
- #ASCO Timing Delays 4 ATS'sDocument8 pages#ASCO Timing Delays 4 ATS'sCyrix.OneNo ratings yet
- PREDICTING RANDOM NUMBERS IN ETHEREUM SMART CONTRACTSDocument54 pagesPREDICTING RANDOM NUMBERS IN ETHEREUM SMART CONTRACTSChloé O BryanNo ratings yet
- Lab Record StudentsDocument10 pagesLab Record StudentsSneha SruthiNo ratings yet
- SQL Lesson 5 - Set OperatorsDocument31 pagesSQL Lesson 5 - Set OperatorsaugustocgnNo ratings yet
- RoR Technical Interview Questions and AnswersDocument12 pagesRoR Technical Interview Questions and AnswersSarmad TabassumNo ratings yet
- BBA III Year Human Resource Management SyllabusDocument47 pagesBBA III Year Human Resource Management SyllabusShivamNo ratings yet
- C++ Practical ManualDocument42 pagesC++ Practical ManualAnyaorah IfeanyichukwuNo ratings yet
- Batch & MS-DOS ProgrammingDocument29 pagesBatch & MS-DOS ProgrammingAlphi ShafeekNo ratings yet
- Strong and Weak TypingDocument4 pagesStrong and Weak Typingtest testNo ratings yet
- C Program Structure and Basic ElementsDocument12 pagesC Program Structure and Basic ElementsRana Sher AliNo ratings yet
- MSC Nastran 2023.1 Installation and Operations GuideDocument240 pagesMSC Nastran 2023.1 Installation and Operations GuidehyperNo ratings yet
- CS2105 Assignment 1Document8 pagesCS2105 Assignment 1weitsangNo ratings yet
- CakePHP Tutorial No. 4 From IBMDocument24 pagesCakePHP Tutorial No. 4 From IBMGerhard Sletten100% (35)
- Isf4csb0 PDFDocument548 pagesIsf4csb0 PDFtim21No ratings yet
- This Examination Paper Consists of 7 Printed PagesDocument7 pagesThis Examination Paper Consists of 7 Printed PagesroshahiraNo ratings yet
- Control Break Statements SAP ABAPDocument3 pagesControl Break Statements SAP ABAPshravanz252No ratings yet
- Data Warehousing and Data Mining Question BankDocument11 pagesData Warehousing and Data Mining Question BankDhilip PrabakaranNo ratings yet
- AsmDocument156 pagesAsmSaulencoNo ratings yet
- Chapter 3 JSDocument78 pagesChapter 3 JSMehari TemesgenNo ratings yet
- Java Class WorkDocument9 pagesJava Class WorkAnand DhanalakotaNo ratings yet
- CGV Lab ManualDocument28 pagesCGV Lab Manualrenuka_ec694456No ratings yet
- Java BasicsDocument25 pagesJava BasicshariprasathkNo ratings yet
- CppChap10 PDFDocument32 pagesCppChap10 PDFNeneNo ratings yet
- Module 3Document97 pagesModule 3popNo ratings yet
- SQL MCQ Question and Answers - Ii: Questiontext Questiontype Choice1Document76 pagesSQL MCQ Question and Answers - Ii: Questiontext Questiontype Choice1Manish SinghNo ratings yet
- EEM336 Week02 Addr ModesDocument96 pagesEEM336 Week02 Addr ModesMustafa TuraçNo ratings yet
- Android Interview QuestionsDocument7 pagesAndroid Interview Questionsabu1882No ratings yet
- O-RAN Working Group 2 (Non-RT RIC and A1 Interface WG) A1 Interface: Application ProtocolDocument62 pagesO-RAN Working Group 2 (Non-RT RIC and A1 Interface WG) A1 Interface: Application ProtocolSalam RomimaaNo ratings yet
- Analysis Report On Lazarus Groups Rootkit Attack Using BYOVD - Sep 22 2022Document41 pagesAnalysis Report On Lazarus Groups Rootkit Attack Using BYOVD - Sep 22 2022Rotem SalinasNo ratings yet
- COBOL Compile-Link JobDocument4 pagesCOBOL Compile-Link JobRammurthyNo ratings yet
- Fiestas Infantiles - Anne WilsonDocument80 pagesFiestas Infantiles - Anne WilsonmtcyosNo ratings yet