You might also like
- CBR EfpDocument11 pagesCBR EfpBintama Sihotang PardabuanNo ratings yet
- "Lab Oriented in Physics On Mathematics Pendulum": Critcal Book ReviewDocument13 pages"Lab Oriented in Physics On Mathematics Pendulum": Critcal Book ReviewmelianaeclsNo ratings yet
- "Circular Motion": Critcal Book ReviewDocument25 pages"Circular Motion": Critcal Book ReviewMelki Waddy SilalahiNo ratings yet
- THERMODYNAMICS REVIEWDocument18 pagesTHERMODYNAMICS REVIEWluni karlina manikNo ratings yet
- CBR - Luni Karlina Manik - HSP in Multimedia - Pesp18Document19 pagesCBR - Luni Karlina Manik - HSP in Multimedia - Pesp18luni karlina manikNo ratings yet
- Analysis of Balance Consideration With Legal I Newton Eli Trisnowati, Rifki Niza, Ismyatun FDocument10 pagesAnalysis of Balance Consideration With Legal I Newton Eli Trisnowati, Rifki Niza, Ismyatun FPutra RizkyNo ratings yet
- Physics E-BookDocument65 pagesPhysics E-Bookpatricia chloe awatNo ratings yet
- Critical Review of Energy BooksDocument11 pagesCritical Review of Energy BooksNOVIA HANUMNo ratings yet
- Nada Afriza - 21033168 - Text Explanation.Document2 pagesNada Afriza - 21033168 - Text Explanation.NadaNo ratings yet
- CBR B Inggris Kelompok 8Document11 pagesCBR B Inggris Kelompok 8Ryan SianiparNo ratings yet
- Paper Mechanics Equilibrium ElasticityDocument20 pagesPaper Mechanics Equilibrium ElasticityRirinNo ratings yet
- QA - LAS - 41 43 General Physics 1 Quarter 2 Week 1 Competency 1 Techie G. Vera CruzDocument22 pagesQA - LAS - 41 43 General Physics 1 Quarter 2 Week 1 Competency 1 Techie G. Vera CruzlaurenceNo ratings yet
- Pendula, Simple and Physical: Project PHYSNET Physics Bldg. Michigan State University East Lansing, MIDocument8 pagesPendula, Simple and Physical: Project PHYSNET Physics Bldg. Michigan State University East Lansing, MIEpic WinNo ratings yet
- ROTATIONAL MOTION CONCEPTSDocument19 pagesROTATIONAL MOTION CONCEPTSKhairunnisa PutryNo ratings yet
- The University of Dodoma: YEAR (2020/2021)Document21 pagesThe University of Dodoma: YEAR (2020/2021)EDENINo ratings yet
- Chapter 1Document28 pagesChapter 1Dina Rivera RabilasNo ratings yet
- Quantum Mechanics Angular MomentumDocument13 pagesQuantum Mechanics Angular MomentumTo Get HerNo ratings yet
- Physics Assignment 4th SemesterDocument11 pagesPhysics Assignment 4th SemesterMuzaffar SalikNo ratings yet
- Physics Lesson PlanDocument12 pagesPhysics Lesson Plancute cuteNo ratings yet
- Homework Parallel-Axis Theorem and TorqueDocument5 pagesHomework Parallel-Axis Theorem and Torquecjbngvcd100% (1)
- Rotation of Rigid BodiesDocument4 pagesRotation of Rigid BodiesJoshua LumasagNo ratings yet
- Waves: PhysicsDocument53 pagesWaves: Physicsjannie nNo ratings yet
- physics1styr 2marksDocument7 pagesphysics1styr 2marksRP Sir QuizzesNo ratings yet
- GRABSUM School Inc. Name: Grade Level and Section: 12 - STEMDocument6 pagesGRABSUM School Inc. Name: Grade Level and Section: 12 - STEMWendell CapiliNo ratings yet
- Gen. Physics: Guided Learning Activity Kit Moment of Inertia, Angular Mass and TorqueDocument32 pagesGen. Physics: Guided Learning Activity Kit Moment of Inertia, Angular Mass and TorqueFernadez RodisonNo ratings yet
- Kinematic Straight LineDocument15 pagesKinematic Straight LineSuparhanNo ratings yet
- ConclusionDocument2 pagesConclusionSaiful AzrieNo ratings yet
- Motion Characteristics For Circular MotionDocument101 pagesMotion Characteristics For Circular MotionMelvin CabonegroNo ratings yet
- Static Equilibrium and The Centers of Gravity and MassDocument18 pagesStatic Equilibrium and The Centers of Gravity and MassEpic WinNo ratings yet
- Gerak Lurus BeraturanDocument27 pagesGerak Lurus BeraturanShofyah Najla PutriNo ratings yet
- JR Inter VSAQDocument5 pagesJR Inter VSAQBNo ratings yet
- Mechanics and Thermodynamics by Wolfgang DemtröderDocument459 pagesMechanics and Thermodynamics by Wolfgang DemtröderAnonymous 24lnhhNo ratings yet
- 2017 Book MechanicsAndThermodynamics PDFDocument459 pages2017 Book MechanicsAndThermodynamics PDFLuis Muñoz Riquelme100% (1)
- Yonii Assignment PhysicsDocument14 pagesYonii Assignment PhysicsyohannesshiferawamehaNo ratings yet
- Gen Phy LASDocument8 pagesGen Phy LASunknownalien610No ratings yet
- Momen InersiaDocument19 pagesMomen InersiaAgus SetyawanNo ratings yet
- SCIENCE 9 WEEK 3 EditedDocument12 pagesSCIENCE 9 WEEK 3 EditedBlythe100% (1)
- Experiment 103: Moment of Inertia of Disk and RingDocument5 pagesExperiment 103: Moment of Inertia of Disk and RingElle GabrielNo ratings yet
- Makalah-Work Energy PowerDocument29 pagesMakalah-Work Energy PowerSastri DwisariniNo ratings yet
- CBR WAVE AND OPTICS_GROUP 6_PESP 2021(1)Document14 pagesCBR WAVE AND OPTICS_GROUP 6_PESP 2021(1)shofiapasaribu.4213121037No ratings yet
- Chapter 1 Basic of StaticsDocument42 pagesChapter 1 Basic of StaticsHabtie WalleNo ratings yet
- Pssutc: Theme: Calculation of Moments of InertiaDocument19 pagesPssutc: Theme: Calculation of Moments of InertiaHayko SpitakciNo ratings yet
- Abbey Secondary School Study Guides Final PhysicsDocument44 pagesAbbey Secondary School Study Guides Final Physicsilias1973No ratings yet
- Moment of InertiaDocument8 pagesMoment of InertiaDika BobihuNo ratings yet
- Science 8 3.3 Force in Circular MotionDocument23 pagesScience 8 3.3 Force in Circular MotionKrisha PoloanNo ratings yet
- Phy 101 Lecture Note 5Document10 pagesPhy 101 Lecture Note 5bukolaesan48No ratings yet
- Dynamic Rotation Engineering IdeaDocument7 pagesDynamic Rotation Engineering IdeaNIA AUDINA SITANGGANGNo ratings yet
- DifferentationDocument39 pagesDifferentationCHUKWUEBUKA NWODONo ratings yet
- MR Differential CalculusDocument10 pagesMR Differential CalculusMata DewaNo ratings yet
- 1 - Intro and Rectilinear Motion With ProblemsDocument29 pages1 - Intro and Rectilinear Motion With ProblemsSuhaib IntezarNo ratings yet
- STD 7 Physics QBDocument12 pagesSTD 7 Physics QBARCHITA GARGNo ratings yet
- Angular MomentumDocument10 pagesAngular MomentumKlarence Medel PacerNo ratings yet
- KSSM Physics Definitions ListDocument6 pagesKSSM Physics Definitions ListYEO MING HUI Moe100% (9)
- Moment of InertiaDocument6 pagesMoment of Inertiarohan_nerlekar794100% (3)
- Simple Harmonic Motion CourseworkDocument7 pagesSimple Harmonic Motion Courseworkvfbgttvcf100% (2)
- Learning Activity Sheet in General Physics 1 Lesson 8: Rotational MotionDocument9 pagesLearning Activity Sheet in General Physics 1 Lesson 8: Rotational MotionSenica Caydil Jay D.No ratings yet
- Iare em Lecture Notes 2 PDFDocument188 pagesIare em Lecture Notes 2 PDFvanajaNo ratings yet
- An Introduction to the Theory of ElasticityFrom EverandAn Introduction to the Theory of ElasticityRating: 4.5 out of 5 stars4.5/5 (2)
- Critical Journal Report on White Content of Carbohydrates and Proteins in White Oyster MushroomDocument4 pagesCritical Journal Report on White Content of Carbohydrates and Proteins in White Oyster MushroomAlvianiNo ratings yet
- Critical Book Report on Noun ClausesDocument8 pagesCritical Book Report on Noun ClausesAlvianiNo ratings yet
- Mini Research Report: Group IiiDocument6 pagesMini Research Report: Group IiiAlvianiNo ratings yet
- Water Manometer Project ReportDocument7 pagesWater Manometer Project ReportAlvianiNo ratings yet
- Nphys J1819 Bphy18 RIDocument5 pagesNphys J1819 Bphy18 RIAlvianiNo ratings yet
- Nphys J1819 Bphy18 CJRDocument9 pagesNphys J1819 Bphy18 CJRAlvianiNo ratings yet
- Read First!!!Document1 pageRead First!!!AlvianiNo ratings yet
- Chapter 10 Systems of Particles: Center of Mass (CM)Document15 pagesChapter 10 Systems of Particles: Center of Mass (CM)Nitin DasNo ratings yet
- Water Manometer Project ReportDocument7 pagesWater Manometer Project ReportAlvianiNo ratings yet
- Phy 2Document38 pagesPhy 2AlvianiNo ratings yet
- JournalDocument4 pagesJournalAlvianiNo ratings yet
- Electric Potential: by Group IiDocument10 pagesElectric Potential: by Group IiAlvianiNo ratings yet
- Hodder 2017Document12 pagesHodder 2017AlvianiNo ratings yet
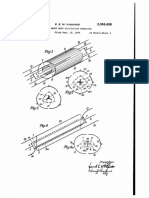
- Oct. 19, 1937. E. E. W. Kassner 2,096,459: Ultra Short Wave Oscillation GeneratorDocument18 pagesOct. 19, 1937. E. E. W. Kassner 2,096,459: Ultra Short Wave Oscillation GeneratorAlvianiNo ratings yet
- Phy 1Document9 pagesPhy 1AlvianiNo ratings yet
- The Turth Journal of Phy 4-5Document14 pagesThe Turth Journal of Phy 4-5AlvianiNo ratings yet
- Chemistry JournalDocument7 pagesChemistry JournalAlvianiNo ratings yet
- Physical ScienceDocument17 pagesPhysical Sciencewewe.trillanes100% (1)
- Cls Math ParserDocument66 pagesCls Math ParserajmmedinaNo ratings yet
- Machine Elements Lecture OrganizationDocument13 pagesMachine Elements Lecture OrganizationDat Huynh CongNo ratings yet
- Basic math symbols guideDocument15 pagesBasic math symbols guideYM Tuan IsyaNo ratings yet
- AQA A Level Mathematics Year 2 Sample Chapters PDFDocument64 pagesAQA A Level Mathematics Year 2 Sample Chapters PDFswatiNo ratings yet
- A General Theory For Elastically Constrained Ball and Radial Roller Bearings Under Arbitrary Load and Speed ConditionsDocument12 pagesA General Theory For Elastically Constrained Ball and Radial Roller Bearings Under Arbitrary Load and Speed Conditionsmanjunath k sNo ratings yet
- CLS Aipmt-18-19 XIII Phy Study-Package-1 SET-1 Chapter-4 PDFDocument42 pagesCLS Aipmt-18-19 XIII Phy Study-Package-1 SET-1 Chapter-4 PDFTJNo ratings yet
- Operator 618807 ENUDocument732 pagesOperator 618807 ENUseesaw (파랑새)0% (1)
- Simbol Matematik 2Document12 pagesSimbol Matematik 2Anonymous Ztyzc5No ratings yet
- Lesson 1 Preliminary Concepts in TrigonometryDocument6 pagesLesson 1 Preliminary Concepts in TrigonometryMARIA ELIZA LOMUNTADNo ratings yet
- PHYSICSDocument26 pagesPHYSICSDannah Kaye AmancioNo ratings yet
- 10 Set SQP Maths Puc I YearDocument33 pages10 Set SQP Maths Puc I YearSUSHAN POOJARY100% (1)
- Addmath F5C1 Circular Measure (Raya Class '23) PDFDocument13 pagesAddmath F5C1 Circular Measure (Raya Class '23) PDFshamiNo ratings yet
- Full download book Trigonometry Booster With Problems And Solutions Pdf pdfDocument30 pagesFull download book Trigonometry Booster With Problems And Solutions Pdf pdfapril.shipp846100% (11)
- Rotational Kinematics Guided Reading KeyDocument3 pagesRotational Kinematics Guided Reading KeyR Jay LagdaminNo ratings yet
- KUKLM Physics Workbook AnswersDocument19 pagesKUKLM Physics Workbook AnswersE DNo ratings yet
- Module 3 - Lesson 1 - Angle MeasureDocument50 pagesModule 3 - Lesson 1 - Angle MeasureGavriel Tristan Vital100% (1)
- Physics @cbseinfiniteDocument274 pagesPhysics @cbseinfiniteParas GosaiNo ratings yet
- Tsu m17 Practice Problems Statics of Rigid BodiesDocument2 pagesTsu m17 Practice Problems Statics of Rigid BodiesMark Lester ValdozNo ratings yet
- MAAE 2101 CD - Mock Final1Document14 pagesMAAE 2101 CD - Mock Final1Marc GoelNo ratings yet
- Special Trig Functions and AnglesDocument23 pagesSpecial Trig Functions and AnglesMarc Rizo JoseNo ratings yet
- Topical Past Question On Circular Measure2Document8 pagesTopical Past Question On Circular Measure2Ebad AhmedNo ratings yet
- Y. Evaporator TC 15000 PDFDocument187 pagesY. Evaporator TC 15000 PDFGloria Del Carmen MuñozNo ratings yet
- Roti Notes Phase 2 II RATE OF TURN INDICATORDocument6 pagesRoti Notes Phase 2 II RATE OF TURN INDICATORGurjit Singh100% (1)
- MooreDocument20 pagesMooreDANIELA BRIGUITTE MORA TORRESNo ratings yet
- Few Sample Programs With ExamplesDocument212 pagesFew Sample Programs With ExamplesmanasaNo ratings yet
- HSSRPTR - +1 Phy Focus Kamil NotesDocument47 pagesHSSRPTR - +1 Phy Focus Kamil NotesNavaneeth Nair100% (1)
- Pre-Calculus Units of Angle MeasureDocument19 pagesPre-Calculus Units of Angle MeasureFranz keannu GonzalesNo ratings yet
- Parts of A Right TriangleDocument24 pagesParts of A Right Triangleregen libretaNo ratings yet
- Solution of Mock Test Jee Main Crash Course Part Test 1Document101 pagesSolution of Mock Test Jee Main Crash Course Part Test 1PM-II-Alpha1-001 Fatima-tuz-ZahraNo ratings yet