You might also like
- Reproduction of Real-World Road Profiles On A Four-Poster Rig For Indoor Vehicle Chassis and Suspension Durability TestingDocument10 pagesReproduction of Real-World Road Profiles On A Four-Poster Rig For Indoor Vehicle Chassis and Suspension Durability TestingVanHieu LuyenNo ratings yet
- 10 18245-Ijaet 982530-1923815Document10 pages10 18245-Ijaet 982530-1923815Frankenstein ReichNo ratings yet
- Global Evaluation of The Drivability of Calibrated Diesel Engine MapsDocument6 pagesGlobal Evaluation of The Drivability of Calibrated Diesel Engine MapsKhac-Hoang NguyenNo ratings yet
- Mechatronics: Pınar Boyraz, Mutlu GündüzDocument13 pagesMechatronics: Pınar Boyraz, Mutlu GündüzKatari KiranNo ratings yet
- JurnalNX-Whole Body VibrationDocument4 pagesJurnalNX-Whole Body VibrationJournalNX - a Multidisciplinary Peer Reviewed JournalNo ratings yet
- Hedrick, 1989Document9 pagesHedrick, 1989Diep Hau ThanNo ratings yet
- The Common Fault Diagnosis Method of Diesel Engine: Zhibin Wang, Yu Zhao, Jian Yan and Jiafeng XuDocument3 pagesThe Common Fault Diagnosis Method of Diesel Engine: Zhibin Wang, Yu Zhao, Jian Yan and Jiafeng XuNemer RaslenNo ratings yet
- 1 s2.0 S2212827122013798 MainDocument6 pages1 s2.0 S2212827122013798 MainTrường Đỗ ThếNo ratings yet
- Analysis of Engine Speed Effect On The Four - StrokDocument7 pagesAnalysis of Engine Speed Effect On The Four - StrokGuilherme FelixNo ratings yet
- A-Evaluación Del Rendimiento de La Combustión de Un Motor Alternativo Diesel Bajo Diversas Mezclas de Combustible Utilizando Un Enfoque Basado en La Vibración de La Serie Temporal de Cálculo PDFDocument10 pagesA-Evaluación Del Rendimiento de La Combustión de Un Motor Alternativo Diesel Bajo Diversas Mezclas de Combustible Utilizando Un Enfoque Basado en La Vibración de La Serie Temporal de Cálculo PDFjhon mario perez carreñoNo ratings yet
- Solar InteligentDocument37 pagesSolar InteligentPrekshitha NNo ratings yet
- WCECS2010 pp949-954Document6 pagesWCECS2010 pp949-954Yeamlak SisayNo ratings yet
- Jeas 1115 2930 PDFDocument6 pagesJeas 1115 2930 PDFJr AbhijithNo ratings yet
- Corbett Engine 2017Document138 pagesCorbett Engine 2017Medicine NyamboNo ratings yet
- Dynamic Response of An Overhead Cam Valve TrainDocument6 pagesDynamic Response of An Overhead Cam Valve TraindarkruseNo ratings yet
- 10 1016@j Measurement 2013 05 008 PDFDocument12 pages10 1016@j Measurement 2013 05 008 PDFgbook picsNo ratings yet
- Reconfigurable Four-Bar Linkages For Mechanism Design LaboratoryDocument12 pagesReconfigurable Four-Bar Linkages For Mechanism Design LaboratoryMahmood AbuZaidNo ratings yet
- In-Situ Torque Measurements in Hybrid Electric Vehicle PowertrainsDocument15 pagesIn-Situ Torque Measurements in Hybrid Electric Vehicle PowertrainspranjaljecNo ratings yet
- CAD Modelling of Automated Spring Load Testing MachineDocument6 pagesCAD Modelling of Automated Spring Load Testing MachineIJRASETPublicationsNo ratings yet
- Chasis DinamométricoDocument6 pagesChasis Dinamométricojose romeroNo ratings yet
- Mathematical Optimization of Variable Valve Timing For Reducing Fuel Consumption of A Si EngineDocument9 pagesMathematical Optimization of Variable Valve Timing For Reducing Fuel Consumption of A Si EngineahmedNo ratings yet
- Design and Development of Longitudinal Vehicle Dynamicsfor An All-Terrain VehicleDocument7 pagesDesign and Development of Longitudinal Vehicle Dynamicsfor An All-Terrain VehiclejszjrNo ratings yet
- A New Closed Form Method For Inertia Force and Moment Calculation in Reciprocating Piston Engine DesignDocument8 pagesA New Closed Form Method For Inertia Force and Moment Calculation in Reciprocating Piston Engine DesignmechdualNo ratings yet
- ODS Truck Applications Operational Modal AnalysisDocument12 pagesODS Truck Applications Operational Modal AnalysisYeshwanth KumarNo ratings yet
- Selecting Optimal Combination of Operating Parameters of Diesel Engine Using Analytic Hierarchy ProcessDocument10 pagesSelecting Optimal Combination of Operating Parameters of Diesel Engine Using Analytic Hierarchy ProcessAngel FajmNo ratings yet
- 10 1 1 98 9640 PDFDocument7 pages10 1 1 98 9640 PDFDev RaiNo ratings yet
- RGVDIPaperDocument7 pagesRGVDIPaperJulius RojoNo ratings yet
- Development and Validation of A Crank Angle Model of An Automotive Turbocharged Engine For Hil ApplicationsDocument10 pagesDevelopment and Validation of A Crank Angle Model of An Automotive Turbocharged Engine For Hil Applicationsarun kumarNo ratings yet
- Dimensional Accuracy of Machines and Printing Speed 2011Document13 pagesDimensional Accuracy of Machines and Printing Speed 2011Parth PatpatiyaNo ratings yet
- Condition-Based Maintenance: Model vs. Statistics A Performance ComparisonDocument7 pagesCondition-Based Maintenance: Model vs. Statistics A Performance ComparisonLourds Egúsquiza EscuderoNo ratings yet
- Structure Simulation and Blade Design of An Aircraft EngineDocument12 pagesStructure Simulation and Blade Design of An Aircraft Enginesirajul_musthafaNo ratings yet
- Modelling and Operational Testing of Pulse-Width Modulation at Injection Time For A Spark-Ignition EngineDocument7 pagesModelling and Operational Testing of Pulse-Width Modulation at Injection Time For A Spark-Ignition EngineAdal VeraNo ratings yet
- 1 PBDocument11 pages1 PBSyed ShariqNo ratings yet
- Design Evaluation of A Follower Cam With Variable Valve Lift MechanismDocument17 pagesDesign Evaluation of A Follower Cam With Variable Valve Lift MechanismMUHAMMAD UMAR KAMRANNo ratings yet
- Drosescu 2017 IOP Conf. Ser. Mater. Sci. Eng. 252 012099Document15 pagesDrosescu 2017 IOP Conf. Ser. Mater. Sci. Eng. 252 012099GamaCraftNo ratings yet
- 2005-26-037 3W Brakes by TVSDocument10 pages2005-26-037 3W Brakes by TVSSiva ReddyNo ratings yet
- Engine Exhaust System Development Optimization For FSAE VehicleDocument19 pagesEngine Exhaust System Development Optimization For FSAE VehicleNaveen SubramanyamNo ratings yet
- Bearing Condition Monitoring Using Vibration SignatureDocument7 pagesBearing Condition Monitoring Using Vibration SignaturemarnalaNo ratings yet
- Simulation and Optimisation of Engine Noise - Predictive Input For The Development ProcessDocument15 pagesSimulation and Optimisation of Engine Noise - Predictive Input For The Development ProcessVivashwanth PaiNo ratings yet
- A Learning Algorithm For Optimal Internal Combustion Engine Calibration in Real TimeDocument11 pagesA Learning Algorithm For Optimal Internal Combustion Engine Calibration in Real Timeoussama safiNo ratings yet
- Advanced Capabilities For Gas Turbine Engine Performance Simulationsalexiou2007Document10 pagesAdvanced Capabilities For Gas Turbine Engine Performance Simulationsalexiou2007lighthilljNo ratings yet
- IADC/SPE 11404 Optimizing Motor Drilling SystemDocument4 pagesIADC/SPE 11404 Optimizing Motor Drilling SystemAnonymous VNu3ODGavNo ratings yet
- Journal 3Document5 pagesJournal 3mohammedsameera.me25No ratings yet
- Energy Conversion and Management: V.T. Lamaris, D.T. HountalasDocument14 pagesEnergy Conversion and Management: V.T. Lamaris, D.T. HountalasRicardo RamirezNo ratings yet
- Sae Technical Paper Series: James F. Sinnamon and Mark C. SellnauDocument17 pagesSae Technical Paper Series: James F. Sinnamon and Mark C. SellnauFabio GuedesNo ratings yet
- Increasing of Power Output of Racing Motorcycle Engine Using of Exhaust System OptimisationDocument8 pagesIncreasing of Power Output of Racing Motorcycle Engine Using of Exhaust System OptimisationPablo EscobarNo ratings yet
- The Engine Testing Work-Flow Analysis Through Value Stream Mapping and SimulationDocument8 pagesThe Engine Testing Work-Flow Analysis Through Value Stream Mapping and SimulationTJPRC PublicationsNo ratings yet
- Mechatronics: Adrian Raisch, Oliver SawodnyDocument10 pagesMechatronics: Adrian Raisch, Oliver SawodnyMuhammad RizkiNo ratings yet
- Sae Technical Paper Series: James C. Peyton Jones, J. Brian Roberts, Jinfeng Pan and Richard A. JacksonDocument10 pagesSae Technical Paper Series: James C. Peyton Jones, J. Brian Roberts, Jinfeng Pan and Richard A. JacksonFarzadNo ratings yet
- Friction Measurement TechniquesDocument13 pagesFriction Measurement TechniquesarunsaktheesNo ratings yet
- Energy Efficient Control of Three-Phase Induction MotorDocument9 pagesEnergy Efficient Control of Three-Phase Induction MotoriiradminNo ratings yet
- Machine-Learning Approaches and Their Challenges.: ArticleDocument11 pagesMachine-Learning Approaches and Their Challenges.: Articlebaskrish19778308No ratings yet
- Lubrication Regime Classification of Hydrodynamic Journal Bearings by Machine Learning Using Torque DataDocument15 pagesLubrication Regime Classification of Hydrodynamic Journal Bearings by Machine Learning Using Torque Dataزهراء حيدر ميريNo ratings yet
- Engine Optimization by Using Variable Valve Timing System at Low Engine RevolutionDocument7 pagesEngine Optimization by Using Variable Valve Timing System at Low Engine RevolutionAxBDNo ratings yet
- AndredeSousa ExtendedAbstractDocument10 pagesAndredeSousa ExtendedAbstractabidparipurnaNo ratings yet
- Gas Turbine ModelsDocument11 pagesGas Turbine ModelsEngr Mubeen100% (1)
- Aerospace: Pycycle: A Tool For Efficient Optimization of Gas Turbine Engine CyclesDocument36 pagesAerospace: Pycycle: A Tool For Efficient Optimization of Gas Turbine Engine CyclesMuhammet özbekNo ratings yet
- Cae PPT 1.1Document11 pagesCae PPT 1.1om mankarNo ratings yet
- Vibration Basics and Machine Reliability Simplified : A Practical Guide to Vibration AnalysisFrom EverandVibration Basics and Machine Reliability Simplified : A Practical Guide to Vibration AnalysisRating: 4 out of 5 stars4/5 (2)
- Iso 09241-143-2012Document104 pagesIso 09241-143-2012Santiagoo4life AliNo ratings yet
- Intrinsic PID Controller For A Segway Type MobileDocument7 pagesIntrinsic PID Controller For A Segway Type MobileSantiagoo4life AliNo ratings yet
- Main 3 PDF FreeDocument51 pagesMain 3 PDF FreeSantiagoo4life AliNo ratings yet
- Simulink شرح برنامجDocument23 pagesSimulink شرح برنامجSantiagoo4life AliNo ratings yet
- التحكم في سرعة محركات التيار المستمرDocument21 pagesالتحكم في سرعة محركات التيار المستمرSantiagoo4life AliNo ratings yet
- Balancing and Attitude Control of Double and Triple Inverted PendulumsDocument29 pagesBalancing and Attitude Control of Double and Triple Inverted PendulumsSantiagoo4life AliNo ratings yet
- Design of Fuzzy Logic Control System For Segway Type Mobile RobotsDocument6 pagesDesign of Fuzzy Logic Control System For Segway Type Mobile RobotsSantiagoo4life AliNo ratings yet
- Stabilized Controller of A Two Wheels Robot: Bulletin of Electrical Engineering and InformaticsDocument7 pagesStabilized Controller of A Two Wheels Robot: Bulletin of Electrical Engineering and InformaticsSantiagoo4life AliNo ratings yet
- World03 08 17Document32 pagesWorld03 08 17The WorldNo ratings yet
- AVE 1 User Manual en Id1563pdfDocument64 pagesAVE 1 User Manual en Id1563pdfNikolay PenevNo ratings yet
- Warning Indicators & Lights Kia IndiaDocument1 pageWarning Indicators & Lights Kia Indiarahulgupta22No ratings yet
- Parts Accessories Manual TBB 85410394 2006 PDFDocument434 pagesParts Accessories Manual TBB 85410394 2006 PDFRicardo Bermudez DazaNo ratings yet
- Dalgakiran Tidy20b-50 El Kitabi Komple Rev01Document46 pagesDalgakiran Tidy20b-50 El Kitabi Komple Rev01Khairul Bashar100% (4)
- Directional Valves WebinarDocument18 pagesDirectional Valves WebinarhaggNo ratings yet
- Technical Note: TrucksDocument16 pagesTechnical Note: Trucksmebarki aberraoufNo ratings yet
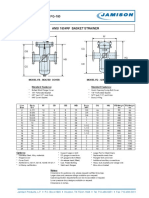
- FB-150 FQ-150 Basket StrainerDocument1 pageFB-150 FQ-150 Basket Strainerklich77No ratings yet
- Benling India Energy and Technology Pvt. LTD.: SpecificationsDocument2 pagesBenling India Energy and Technology Pvt. LTD.: Specificationsanu swamiNo ratings yet
- Marine TechDocument28 pagesMarine TechMichael OwingsNo ratings yet
- CauhoiontapDocument7 pagesCauhoiontapÁNH NGỌC NGUYỄN THỊNo ratings yet
- Ahmed 1984Document32 pagesAhmed 1984Jesus AguilarNo ratings yet
- IMDS Training IMDS TrainingDocument34 pagesIMDS Training IMDS TrainingRajeshLSNo ratings yet
- Taxi Cab BookingDocument26 pagesTaxi Cab BookingasdfqwerNo ratings yet
- Advantages of Dual Master Cylinder Braking SystemDocument1 pageAdvantages of Dual Master Cylinder Braking Systemarputhamech100% (1)
- D Component Parts PDFDocument29 pagesD Component Parts PDFpramodh kumarNo ratings yet
- Power Team RH-Series S/A Cylinders - CatalogDocument1 pagePower Team RH-Series S/A Cylinders - CatalogTitanplyNo ratings yet
- ZF 6HP26 ProceduresDocument37 pagesZF 6HP26 ProceduresMaurizio Peralti100% (12)
- Frontier Fire Pumps - O&m ManualDocument24 pagesFrontier Fire Pumps - O&m ManualAhmad HejaziNo ratings yet
- Motor Industry Japan - 2021Document34 pagesMotor Industry Japan - 2021OmriReisNo ratings yet
- 1824 V0130 Me Iom 0001 - C - C1Document493 pages1824 V0130 Me Iom 0001 - C - C1Eliezer R.No ratings yet
- Ffi Su,: (99Rcc) L9Li L9Document6 pagesFfi Su,: (99Rcc) L9Li L9Ahmad BhattiNo ratings yet
- Electropak: SeriesDocument10 pagesElectropak: SeriesChristian Rivera FloverNo ratings yet
- s270s SeriesDocument80 pagess270s SeriesAlexey KolmakovNo ratings yet
- Taklimat Pensyarah Penyelia PsasDocument24 pagesTaklimat Pensyarah Penyelia PsasNorashady Mohd NoorNo ratings yet
- DescentDocument8 pagesDescentBenjamin StrawNo ratings yet
- WA270pt-3 WA270 3 Service ManualDocument55 pagesWA270pt-3 WA270 3 Service ManualMrMM100No ratings yet
- RII (Renewal Rewrite), Effective Date 20221128, Transaction 00280Document16 pagesRII (Renewal Rewrite), Effective Date 20221128, Transaction 00280Pete PoliNo ratings yet
- Performance Information Series PVP 100/140 Pressure Compensated, Variable Volume, Piston PumpsDocument10 pagesPerformance Information Series PVP 100/140 Pressure Compensated, Variable Volume, Piston PumpsDaniel MarNo ratings yet
- CII EV Conference ReportDocument3 pagesCII EV Conference Reportshrikar chalamNo ratings yet