You might also like
- محاضرة 11 - المصهراتDocument8 pagesمحاضرة 11 - المصهراتAnood N. JalladNo ratings yet
- مولدات التيار المستمرDocument39 pagesمولدات التيار المستمرblbmalekNo ratings yet
- مكبرات العمليات PDFDocument55 pagesمكبرات العمليات PDFmahmoud DawoodNo ratings yet
- Lab 3Document3 pagesLab 3abiyedopiNo ratings yet
- Safety Relay TrainingDocument22 pagesSafety Relay TrainingJShearer94% (16)
- حماية المحركات الكهربائيةDocument12 pagesحماية المحركات الكهربائيةHussain Al-sayoudNo ratings yet
- Stps 30 L 60 CDocument13 pagesStps 30 L 60 CElvis LinaresNo ratings yet
- Wireless Networks الشبكات اللاسلكيةDocument12 pagesWireless Networks الشبكات اللاسلكيةAhmed JahaNo ratings yet
- Single Phase Half - Wave Controlled RectifierDocument5 pagesSingle Phase Half - Wave Controlled Rectifierali rebhiNo ratings yet
- Visio-9 - Cement - Silos - & - Packing - Local - Net - Configuration - Rev 04Document1 pageVisio-9 - Cement - Silos - & - Packing - Local - Net - Configuration - Rev 04Khan Mujtaba KhanNo ratings yet
- Ik60a Circuit Breakers (Curve C)Document3 pagesIk60a Circuit Breakers (Curve C)Jan SebastianNo ratings yet
- EE201 CHP 3.2 W5L1 UpDocument15 pagesEE201 CHP 3.2 W5L1 Upzain khuramNo ratings yet
- Circuit Theory ErwrDocument20 pagesCircuit Theory ErwrSebastianNo ratings yet
- RepeaterDocument1 pageRepeatervasikarantceNo ratings yet
- النماذج في قواعد البياناتDocument17 pagesالنماذج في قواعد البياناتtahriaissa75No ratings yet
- Diode Zener: I K A I UDocument3 pagesDiode Zener: I K A I UMaikiNo ratings yet
- Diagram A ElectricoDocument1 pageDiagram A ElectricoHector ValenciaNo ratings yet
- Slides of Lecture5Document26 pagesSlides of Lecture5rudra patraNo ratings yet
- Clapper CircuitDocument6 pagesClapper Circuitsameed2010No ratings yet
- Basis Oefeningen PLC 2002-2003Document13 pagesBasis Oefeningen PLC 2002-2003tino pawNo ratings yet
- حماية المحولات الكهربائية ـ موقع الفريد في الفيزياءDocument18 pagesحماية المحولات الكهربائية ـ موقع الفريد في الفيزياءtenere comNo ratings yet
- Amélioration de La Stabilité Du Réseau Électrique de La République Du Congo Par Les Contrôleurs PSS Et STATCOM - Fr.enDocument16 pagesAmélioration de La Stabilité Du Réseau Électrique de La République Du Congo Par Les Contrôleurs PSS Et STATCOM - Fr.enAristide De Mantsala IfiakeNo ratings yet
- Aqualab ClinicDocument12 pagesAqualab ClinichonyarnamiqNo ratings yet
- Type C PD CircuitDocument5 pagesType C PD CircuitNaveen.R - SonetonixNo ratings yet
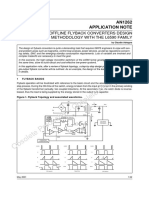
- Obsolete Product(s) - Obsolete Product(s) : Offline Flyback Converters Design Methodology With The L6590 FamilyDocument42 pagesObsolete Product(s) - Obsolete Product(s) : Offline Flyback Converters Design Methodology With The L6590 FamilyHrishikesh KadamNo ratings yet
- طرق تغذية مولدات التيار المستمرDocument12 pagesطرق تغذية مولدات التيار المستمرKouta SanNo ratings yet
- Chapter 7 - Digital Output Circuit (DO)Document8 pagesChapter 7 - Digital Output Circuit (DO)Ivan SilvaNo ratings yet
- E Catalog General 4Document40 pagesE Catalog General 4Abdalhakeem AlturkyNo ratings yet
- الثايروستر عربيDocument46 pagesالثايروستر عربيHassan SaadNo ratings yet
- FD QG Po 002 en de FR ItDocument36 pagesFD QG Po 002 en de FR Itherysyam1980No ratings yet
- Acti9 IK60A Katalog IndonesiaDocument2 pagesActi9 IK60A Katalog IndonesiaHansen LaMessiah SaputraNo ratings yet
- التبريد بالإمتصاصDocument15 pagesالتبريد بالإمتصاصEZAY ازايNo ratings yet
- إختيار ودراسة أداء وحدات مناولة الهواء والوحدات الطرفية والمراوحDocument24 pagesإختيار ودراسة أداء وحدات مناولة الهواء والوحدات الطرفية والمراوحAhmed ElswefyNo ratings yet
- Pt2253a (v2Document15 pagesPt2253a (v2vetchboy100% (1)
- وصف أوامر العملDocument11 pagesوصف أوامر العملmohamed almougtabaNo ratings yet
- سلوك التكاليف وطرق قياس التكاليفDocument25 pagesسلوك التكاليف وطرق قياس التكاليفAicha BayaNo ratings yet
- FME-Unit 4 - Network AnalysisDocument62 pagesFME-Unit 4 - Network AnalysisMitali ZaveriNo ratings yet
- S.5.1.1 Denah Rencana KolomDocument1 pageS.5.1.1 Denah Rencana KolomGojenx SgalanyaNo ratings yet
- Ekip Com Actuator ManualDocument4 pagesEkip Com Actuator ManualJose Javier Costa LarragaNo ratings yet
- Main PCB: Circuit Drawn With Power Supply OffDocument1 pageMain PCB: Circuit Drawn With Power Supply OffEdwin RamirezNo ratings yet
- Slides of Lecture6Document38 pagesSlides of Lecture6rudra patraNo ratings yet
- صيانة وتشخيص أعطال الوحدات الصغيرةDocument24 pagesصيانة وتشخيص أعطال الوحدات الصغيرةmohamed almougtabaNo ratings yet
- Electronic Stick For Blind People: Submitted by N. JayaprakashDocument16 pagesElectronic Stick For Blind People: Submitted by N. JayaprakashAbdo ZezoNo ratings yet
- Festo 4534 - 4527 Solenoid Coil MSFW-24-50 - 60Document70 pagesFesto 4534 - 4527 Solenoid Coil MSFW-24-50 - 60vlinemubeenNo ratings yet
- Catalog C60H-DCDocument6 pagesCatalog C60H-DCNae MocioiNo ratings yet
- Flying WindmillDocument4 pagesFlying WindmillAbhi AbhilashNo ratings yet
- Cei Free Play Mod 4-12-2020 With PicturesDocument1 pageCei Free Play Mod 4-12-2020 With PicturesAnthony TwardowskiNo ratings yet
- Am Modulator ProjectDocument14 pagesAm Modulator ProjectMariz-Elaine Noceja RodriguezNo ratings yet
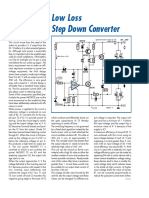
- Low Loss Step Down Converter: Michel FrankeDocument1 pageLow Loss Step Down Converter: Michel FrankeJosé ManuelNo ratings yet
- Apex B2000 PCB VasDocument1 pageApex B2000 PCB Vasbahattin147No ratings yet
- Main PCB: Circuit Drawn With Power Supply OffDocument1 pageMain PCB: Circuit Drawn With Power Supply OffSteven Alberto ZuletaNo ratings yet
- Bee Manual PDFDocument32 pagesBee Manual PDFKishan VarshneyNo ratings yet
- Ø Ù Ø Ø Ø Ù Ù Ø Ø Ø© Ø Ù Ø Ø Ù Ù Ø©Document16 pagesØ Ù Ø Ø Ø Ù Ù Ø Ø Ø© Ø Ù Ø Ø Ù Ù Ø©Sally NajiNo ratings yet
- Unit 2 PDFDocument50 pagesUnit 2 PDFdeepthiNo ratings yet
- Cataloguec 60 HDCDocument6 pagesCataloguec 60 HDCPanu Mark IINo ratings yet
- Onsm S A0001039453 1Document8 pagesOnsm S A0001039453 1Irvin Adan Lujan HernandezNo ratings yet
- CDC2510Document9 pagesCDC2510terry panNo ratings yet
- Acti9 IK60N Katalog Indonesia PDFDocument3 pagesActi9 IK60N Katalog Indonesia PDFGeorge CalinNo ratings yet
- Iso 09241-143-2012Document104 pagesIso 09241-143-2012Santiagoo4life AliNo ratings yet
- Main 3 PDF FreeDocument51 pagesMain 3 PDF FreeSantiagoo4life AliNo ratings yet
- Intrinsic PID Controller For A Segway Type MobileDocument7 pagesIntrinsic PID Controller For A Segway Type MobileSantiagoo4life AliNo ratings yet
- التحكم في سرعة محركات التيار المستمرDocument21 pagesالتحكم في سرعة محركات التيار المستمرSantiagoo4life AliNo ratings yet
- Dynamic Measuring of Performance Parameters For Vehicles EnginesDocument8 pagesDynamic Measuring of Performance Parameters For Vehicles EnginesSantiagoo4life AliNo ratings yet
- Balancing and Attitude Control of Double and Triple Inverted PendulumsDocument29 pagesBalancing and Attitude Control of Double and Triple Inverted PendulumsSantiagoo4life AliNo ratings yet
- Design of Fuzzy Logic Control System For Segway Type Mobile RobotsDocument6 pagesDesign of Fuzzy Logic Control System For Segway Type Mobile RobotsSantiagoo4life AliNo ratings yet
- Stabilized Controller of A Two Wheels Robot: Bulletin of Electrical Engineering and InformaticsDocument7 pagesStabilized Controller of A Two Wheels Robot: Bulletin of Electrical Engineering and InformaticsSantiagoo4life AliNo ratings yet
- Vector Control Assigment 4 PDFDocument10 pagesVector Control Assigment 4 PDFMìkz MíshrãNo ratings yet
- Selection For Street Light Luminar - (PART-1) - Electrical Notes & ArticlesDocument9 pagesSelection For Street Light Luminar - (PART-1) - Electrical Notes & Articleslegasu zemeneNo ratings yet
- 4 - 0 MC Destructive TestingDocument23 pages4 - 0 MC Destructive TestingRidho KurniawanNo ratings yet
- Ficha Tecnica Mylard Tipo A DupontDocument2 pagesFicha Tecnica Mylard Tipo A DupontJuan Hilares AlejandroNo ratings yet
- BXE Experiment No.2Document12 pagesBXE Experiment No.2DsgawaliNo ratings yet
- 03 Rig InstrumentationDocument34 pages03 Rig InstrumentationArkhatTompakovNo ratings yet
- Friction ExperimentDocument6 pagesFriction ExperimentsedraNo ratings yet
- 2126 DR 250 FSDocument2 pages2126 DR 250 FSalstomNo ratings yet
- Product Data Sheet: Circuit Breaker Compact Ns800H, 70 Ka at 415 Vac, Micrologic 2.0 Trip Unit, 800 A, Fixed, 4 Poles 4DDocument3 pagesProduct Data Sheet: Circuit Breaker Compact Ns800H, 70 Ka at 415 Vac, Micrologic 2.0 Trip Unit, 800 A, Fixed, 4 Poles 4DsoyalNo ratings yet
- FX Maverick Owner'S Manual: Made in SwedenDocument7 pagesFX Maverick Owner'S Manual: Made in Swedentigre1677No ratings yet
- Lecture 8: Voltage Regulation: ECE 5984: Power Distribution System AnalysisDocument34 pagesLecture 8: Voltage Regulation: ECE 5984: Power Distribution System Analysisante mitarNo ratings yet
- United States Patent (10) Patent No.: US 8,209,912 B2Document14 pagesUnited States Patent (10) Patent No.: US 8,209,912 B2pmurphNo ratings yet
- Electrical-engineering-syllabus-R-2022 C - Mumbai-UniversityDocument57 pagesElectrical-engineering-syllabus-R-2022 C - Mumbai-UniversitySayali ParabNo ratings yet
- (Solution Manual) Fundamentals of Electric Circuits 4ed - Sadiku-Pages-774-800Document35 pages(Solution Manual) Fundamentals of Electric Circuits 4ed - Sadiku-Pages-774-800Leo AudeNo ratings yet
- HoDocument2 pagesHoLasmaenita SiahaanNo ratings yet
- Unbalance Motor Vibrators Type-SeDocument2 pagesUnbalance Motor Vibrators Type-Sestalin63No ratings yet
- Periodic TrendsDocument4 pagesPeriodic TrendsDavid Jesus MoralesNo ratings yet
- Electricity Generation Using Wind Power (Second Edition), Li Zhang DR, William Shepherd, 2017Document292 pagesElectricity Generation Using Wind Power (Second Edition), Li Zhang DR, William Shepherd, 2017Martin LazarovNo ratings yet
- Sieve Analysis Particle Size Distribution CurveDocument19 pagesSieve Analysis Particle Size Distribution CurveAlexander Escobedo Jr.No ratings yet
- Физика 12-класс eng advanced спецDocument11 pagesФизика 12-класс eng advanced спецColdIsaacNo ratings yet
- Improved Stopband Performance in Ceramic Waveguide Filters Using Step Impedance and Step Width ResonatorsDocument3 pagesImproved Stopband Performance in Ceramic Waveguide Filters Using Step Impedance and Step Width ResonatorsWaleed SethiNo ratings yet
- Evaluation of Adhesive Anchors in Concrete Under Sustained Loading ConditionsDocument18 pagesEvaluation of Adhesive Anchors in Concrete Under Sustained Loading ConditionsWaleed AhmedNo ratings yet
- Revision Practice 4Document23 pagesRevision Practice 4Mary Grace BucasNo ratings yet
- Pullout Strength Models For FRP AnchorsDocument9 pagesPullout Strength Models For FRP AnchorsJULIO VAZQUEZNo ratings yet
- EE0015 Lab Activity 4Document15 pagesEE0015 Lab Activity 4kyle vicenteNo ratings yet
- ACS772 DatasheetDocument46 pagesACS772 DatasheetfsrdNo ratings yet
- Article 1 Lema CoaxalitateDocument7 pagesArticle 1 Lema CoaxalitatetusherNo ratings yet
- Topic 05 One Dimensional Kinematics NotesDocument28 pagesTopic 05 One Dimensional Kinematics NotesRukiezillaNo ratings yet
- This Study Resource Was Shared Via: My CoursesDocument3 pagesThis Study Resource Was Shared Via: My CoursesPaulo BollosaNo ratings yet
- Pyramid Ias Academy: KaraikudiDocument12 pagesPyramid Ias Academy: KaraikudiArrow BuildersNo ratings yet