You might also like
- ACFD Lecture 3Document51 pagesACFD Lecture 3haftom gebrehiwotNo ratings yet
- CFD-QUE BANK SOLUTIONSDocument7 pagesCFD-QUE BANK SOLUTIONSPradeep MNo ratings yet
- Factorization of Boundary Value Problems Using the Invariant Embedding MethodFrom EverandFactorization of Boundary Value Problems Using the Invariant Embedding MethodNo ratings yet
- 04 Numerical MethodsDocument9 pages04 Numerical MethodsSunilNo ratings yet
- Understanding Vector Calculus: Practical Development and Solved ProblemsFrom EverandUnderstanding Vector Calculus: Practical Development and Solved ProblemsNo ratings yet
- PDEs: Classification, FD methods and CFD techniquesDocument21 pagesPDEs: Classification, FD methods and CFD techniquesGovinda KabraNo ratings yet
- Miet 2394 CFD Lecture 8Document35 pagesMiet 2394 CFD Lecture 8cepong89No ratings yet
- CFD at Chapter-3Document22 pagesCFD at Chapter-3Pawan KumarNo ratings yet
- Numerical Accuracy in The Solution of The ShallowDocument8 pagesNumerical Accuracy in The Solution of The ShallowFernando Robles AguilarNo ratings yet
- TMMV08 A1 2024Document9 pagesTMMV08 A1 2024adityaNo ratings yet
- Use COMSOL for efficient inverse modeling of aquifersDocument8 pagesUse COMSOL for efficient inverse modeling of aquifersLexin LiNo ratings yet
- Trust and Quality in CFDDocument6 pagesTrust and Quality in CFDpfylNo ratings yet
- Solute Transport Numerical MethodsDocument22 pagesSolute Transport Numerical Methodsbong109No ratings yet
- A Comparitive Study of FVM and FDMDocument7 pagesA Comparitive Study of FVM and FDMHassan AbdelmoamenNo ratings yet
- The Importance of the CFL Condition in Solving PDEs NumericallyDocument3 pagesThe Importance of the CFL Condition in Solving PDEs NumericallyAndrés Felipe Vélez AcevedoNo ratings yet
- Finite Difference Method GuideDocument37 pagesFinite Difference Method GuideΙωάννης Γεωργίου Μάντης100% (2)
- ETASR1 (Formulation Low 2018)Document5 pagesETASR1 (Formulation Low 2018)Abdullah AslamNo ratings yet
- Assignment 2 PDFDocument14 pagesAssignment 2 PDFChinmay GosaviNo ratings yet
- FEM, FDM and FVM numerical methods comparisonDocument6 pagesFEM, FDM and FVM numerical methods comparisonQi PanNo ratings yet
- Lecture 5: Overview of Numerical Methods (Cont'd)Document17 pagesLecture 5: Overview of Numerical Methods (Cont'd)Anonymous ueh2VMT5GNo ratings yet
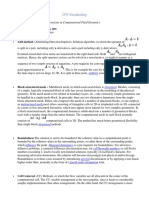
- CFD VocabularyDocument10 pagesCFD VocabularyAmir LachrafNo ratings yet
- MATH2059 - Ozge KK-Chapter1Document34 pagesMATH2059 - Ozge KK-Chapter1demir ermanNo ratings yet
- Introduction To CFD Basics Rajesh BhaskaranDocument17 pagesIntroduction To CFD Basics Rajesh BhaskaranSuta VijayaNo ratings yet
- Deconvolution: A Wavelet Frame Approach: Received: Date / Revised Version: DateDocument36 pagesDeconvolution: A Wavelet Frame Approach: Received: Date / Revised Version: DatesahibhaiNo ratings yet
- Optimizacion (Ingles)Document133 pagesOptimizacion (Ingles)Sergio PeñarandaNo ratings yet
- CFD ProDocument48 pagesCFD Pronaji1365No ratings yet
- Received 10 April 1997. Read 16 March 1997. Published 30 December 1998.Document18 pagesReceived 10 April 1997. Read 16 March 1997. Published 30 December 1998.Tg WallasNo ratings yet
- A MATLAB Method of Lines Template For Evolution EquationsDocument6 pagesA MATLAB Method of Lines Template For Evolution EquationsDag GetNo ratings yet
- Computational Methods - CFD Lecture 5Document23 pagesComputational Methods - CFD Lecture 5Morteza KhashehchiNo ratings yet
- CFD Course Covers Numerical MethodsDocument9 pagesCFD Course Covers Numerical MethodsAbhishek SaxenaNo ratings yet
- Reliability Based Structural Design: Ton VrouwenvelderDocument9 pagesReliability Based Structural Design: Ton VrouwenvelderFlávio LasmarNo ratings yet
- Numerical Analysis PDFDocument15 pagesNumerical Analysis PDFaauppalNo ratings yet
- Reddy Chap3-4Document68 pagesReddy Chap3-4Juan CarlosNo ratings yet
- Scaling and Model Simplification: Chapter ThreeDocument18 pagesScaling and Model Simplification: Chapter ThreeNAREN STEVE CASTIBLANCO GUERRANo ratings yet
- ADE 1D StabilityDocument6 pagesADE 1D StabilityMartin AntoNo ratings yet
- NHT 2023Document11 pagesNHT 2023Bishwajit MajiNo ratings yet
- A Review of Techniques For Improving Mesh Quality in A Finite Element ComputationDocument8 pagesA Review of Techniques For Improving Mesh Quality in A Finite Element ComputationtanyadaNo ratings yet
- Solution Procedure For Non-Linear Finite Element Equations 2003Document23 pagesSolution Procedure For Non-Linear Finite Element Equations 2003myplaxis100% (1)
- Algorithms For Bound Constrained Quadratic Programming ProblemsDocument24 pagesAlgorithms For Bound Constrained Quadratic Programming ProblemsasdfNo ratings yet
- Derivation of High-Order Advection - Diffusion Schemes: Pavel TkalichDocument16 pagesDerivation of High-Order Advection - Diffusion Schemes: Pavel TkalichIssa IssaNo ratings yet
- 82 FUNDAMENTALS area approximationDocument50 pages82 FUNDAMENTALS area approximationmkashkooli_scribdNo ratings yet
- Meshless Methods1Document4 pagesMeshless Methods1herevenkatNo ratings yet
- Bisection Method in Multiple DimensionsDocument6 pagesBisection Method in Multiple DimensionshkmydreamsNo ratings yet
- What Is Optimization?Document15 pagesWhat Is Optimization?MHARLOU TORINGNo ratings yet
- 8Document9 pages8Bahadır HarmancıNo ratings yet
- Constraint Satisfaction ProblemsDocument77 pagesConstraint Satisfaction Problemsharshita.sharma.phd23No ratings yet
- What Is CFD and Why? Numerical Solutions FD vs. FV (Vs. FE) FV For Transport Equation Temporal Discretisation 3d Transport EquationDocument26 pagesWhat Is CFD and Why? Numerical Solutions FD vs. FV (Vs. FE) FV For Transport Equation Temporal Discretisation 3d Transport EquationKishan KarkeraNo ratings yet
- The Polynomial Toolbox for MATLAB: Introduction to Robust Control with Parametric UncertaintiesDocument56 pagesThe Polynomial Toolbox for MATLAB: Introduction to Robust Control with Parametric Uncertaintiestườngt_14No ratings yet
- On Dimension Bounds For Auxiliary Quantum Systems - Salman Beigi, Amin GohariDocument30 pagesOn Dimension Bounds For Auxiliary Quantum Systems - Salman Beigi, Amin GohariCambiador de MundoNo ratings yet
- Numerical Methods in Computational Fluid Dynamics (CFD)Document40 pagesNumerical Methods in Computational Fluid Dynamics (CFD)Le QuangNo ratings yet
- PCA Reduces 2D Dataset to 1DDocument15 pagesPCA Reduces 2D Dataset to 1DSavitha ElluruNo ratings yet
- Finite Difference WikipediaDocument6 pagesFinite Difference Wikipedialetter_ashish4444No ratings yet
- CFD Discretization LectureDocument89 pagesCFD Discretization Lecturevibhor28100% (3)
- Fractional Diffusion Coefficient Identification Problem Solved Using Output Least SquaresDocument30 pagesFractional Diffusion Coefficient Identification Problem Solved Using Output Least Squaresabde aabilNo ratings yet
- Convergence Order COMSOLDocument6 pagesConvergence Order COMSOLTomas Barrientos BrunaNo ratings yet
- Introduction To Computational Fluid DynamicsDocument46 pagesIntroduction To Computational Fluid DynamicsGinu ThomasNo ratings yet
- Introduction To Computational Fluid DynamicsDocument46 pagesIntroduction To Computational Fluid Dynamicsanon_635727152No ratings yet
- Quotation RequestDocument1 pageQuotation RequestMohammedNo ratings yet
- Chapter 7-8-9Document26 pagesChapter 7-8-9MohammedNo ratings yet
- CHAPTER 3 - RevisedDocument26 pagesCHAPTER 3 - RevisedMohammedNo ratings yet
- Thermoforming PresentationDocument2 pagesThermoforming PresentationMohammedNo ratings yet
- Chapter 5-6Document26 pagesChapter 5-6MohammedNo ratings yet
- Chapter 1-2Document32 pagesChapter 1-2MohammedNo ratings yet
- NA-Ch.03 ProblemsDocument47 pagesNA-Ch.03 ProblemsMohammedNo ratings yet
- Engineering Hydrology Chapter 5 Discussion: Eng. Abdullah Hijazi Eng. Alaa HassanDocument29 pagesEngineering Hydrology Chapter 5 Discussion: Eng. Abdullah Hijazi Eng. Alaa HassanMohammedNo ratings yet
- Engineering Hydrology GroundwaterDocument15 pagesEngineering Hydrology GroundwaterMohammedNo ratings yet
- Discussion CH1Document15 pagesDiscussion CH1Mohammed100% (1)
- Chapter 6Document32 pagesChapter 6MohammedNo ratings yet
- Chapter 2 Solutions Matrix OperationsDocument1 pageChapter 2 Solutions Matrix OperationsMohammedNo ratings yet
- Engineering Hydrology Chapter 3 Discussion: Eng. Abdullah Hijazi Eng. Alaa HassanDocument39 pagesEngineering Hydrology Chapter 3 Discussion: Eng. Abdullah Hijazi Eng. Alaa HassanMohammedNo ratings yet
- Discussion CH1Document15 pagesDiscussion CH1MohammedNo ratings yet
- Ch1 Mathematical ModelingDocument14 pagesCh1 Mathematical ModelingMohammedNo ratings yet
- واجب هيدرولوجي شبتر 4Document7 pagesواجب هيدرولوجي شبتر 4MohammedNo ratings yet
- Analog Vs DigitalDocument6 pagesAnalog Vs DigitalMohan AwasthyNo ratings yet
- NDX WarrenDocument23 pagesNDX WarrenBangsawan AriefNo ratings yet
- 4720.00080A01 S22 Series Service ManualDocument138 pages4720.00080A01 S22 Series Service ManualSIM MOVAR86% (7)
- Vibrational Numbers (FAQ) PDFDocument4 pagesVibrational Numbers (FAQ) PDFJcpathak100% (1)
- PEQ - Acids & Alkalis - KS3 (PH)Document3 pagesPEQ - Acids & Alkalis - KS3 (PH)yayaNo ratings yet
- Teradata 13.10 FeaturesDocument43 pagesTeradata 13.10 FeaturesLansa PhillipNo ratings yet
- Oxford Science 8Document258 pagesOxford Science 8Emily NuttingNo ratings yet
- Image Classification Using CNN: Page - 1Document13 pagesImage Classification Using CNN: Page - 1BhanuprakashNo ratings yet
- Aristotle's Biology and MetaphysicsDocument7 pagesAristotle's Biology and MetaphysicsVuk SuboticNo ratings yet
- Formation Damage and Horizontal WellsDocument14 pagesFormation Damage and Horizontal WellsAdhi100% (1)
- Water Softening and Demineralization: Pengolahan Air Dan Limbah Industri DTK 2019Document97 pagesWater Softening and Demineralization: Pengolahan Air Dan Limbah Industri DTK 2019Aldi RahmatNo ratings yet
- Mapua Institute of Technology Experiment Validates Bernoulli's TheoremDocument16 pagesMapua Institute of Technology Experiment Validates Bernoulli's TheoremNadine Pascual100% (2)
- Glass Balustrade Structural CalculationDocument11 pagesGlass Balustrade Structural CalculationMONERA d.o.o.No ratings yet
- Sample Papers 230-311 PDFDocument82 pagesSample Papers 230-311 PDFMohamed Anas100% (2)
- RG 8/U Type: Coaxial Cable ElectronicsDocument1 pageRG 8/U Type: Coaxial Cable ElectronicsLUISNo ratings yet
- McqsDocument14 pagesMcqschandramohan muruganNo ratings yet
- Current Differential Relay ManualDocument4 pagesCurrent Differential Relay Manualppraveenkumar79No ratings yet
- Study of Pavement Condition Index (PCI) Relationship With International Roughness Index (IRI) On Flexible PavementDocument6 pagesStudy of Pavement Condition Index (PCI) Relationship With International Roughness Index (IRI) On Flexible Pavementsazwan2No ratings yet
- 855 (1400)Document6 pages855 (1400)Harman Singh NagpalNo ratings yet
- Course:: Heating Ventilation & Air-Conditioning (ME 326)Document45 pagesCourse:: Heating Ventilation & Air-Conditioning (ME 326)Muhammad OsamaNo ratings yet
- Six Sigma Overview for Green BeltsDocument31 pagesSix Sigma Overview for Green BeltsAnkitNo ratings yet
- Data Network Threats and Penetration TestingDocument5 pagesData Network Threats and Penetration TestingJournal of Telecommunications100% (1)
- 7805T Ecg-960Document2 pages7805T Ecg-960bellscbNo ratings yet
- Physics ART INTEGRATED PROJECTDocument24 pagesPhysics ART INTEGRATED PROJECTPRATHAM BANSAL67% (3)
- Discharge Coefficients For Combustor-Liner Air-Entry Holes II - Flush Rectangular Holes, Step Louvers, and ScoopsDocument58 pagesDischarge Coefficients For Combustor-Liner Air-Entry Holes II - Flush Rectangular Holes, Step Louvers, and ScoopsLanceNo ratings yet
- Math403 - 4.0 Continuous Probability DistributionDocument42 pagesMath403 - 4.0 Continuous Probability DistributionMae FalcunitinNo ratings yet
- STA 2023 SyllabusDocument8 pagesSTA 2023 SyllabusEdison FyeNo ratings yet
- Ieee 1471-2000Document28 pagesIeee 1471-2000Suzanne StewartNo ratings yet
- Understanding Physical Chemistry Author Dor Ben AmotzDocument35 pagesUnderstanding Physical Chemistry Author Dor Ben AmotzGintaNo ratings yet
- Current Pillar DesignDocument24 pagesCurrent Pillar DesignjmgumbwaNo ratings yet
- A Mathematician's Lament: How School Cheats Us Out of Our Most Fascinating and Imaginative Art FormFrom EverandA Mathematician's Lament: How School Cheats Us Out of Our Most Fascinating and Imaginative Art FormRating: 5 out of 5 stars5/5 (5)
- Build a Mathematical Mind - Even If You Think You Can't Have One: Become a Pattern Detective. Boost Your Critical and Logical Thinking Skills.From EverandBuild a Mathematical Mind - Even If You Think You Can't Have One: Become a Pattern Detective. Boost Your Critical and Logical Thinking Skills.Rating: 5 out of 5 stars5/5 (1)
- Mathematical Mindsets: Unleashing Students' Potential through Creative Math, Inspiring Messages and Innovative TeachingFrom EverandMathematical Mindsets: Unleashing Students' Potential through Creative Math, Inspiring Messages and Innovative TeachingRating: 4.5 out of 5 stars4.5/5 (21)
- Quantum Physics: A Beginners Guide to How Quantum Physics Affects Everything around UsFrom EverandQuantum Physics: A Beginners Guide to How Quantum Physics Affects Everything around UsRating: 4.5 out of 5 stars4.5/5 (3)
- Mental Math Secrets - How To Be a Human CalculatorFrom EverandMental Math Secrets - How To Be a Human CalculatorRating: 5 out of 5 stars5/5 (3)
- A Mathematician's Lament: How School Cheats Us Out of Our Most Fascinating and Imaginative Art FormFrom EverandA Mathematician's Lament: How School Cheats Us Out of Our Most Fascinating and Imaginative Art FormRating: 4.5 out of 5 stars4.5/5 (20)
- Making and Tinkering With STEM: Solving Design Challenges With Young ChildrenFrom EverandMaking and Tinkering With STEM: Solving Design Challenges With Young ChildrenNo ratings yet
- Basic Math & Pre-Algebra Workbook For Dummies with Online PracticeFrom EverandBasic Math & Pre-Algebra Workbook For Dummies with Online PracticeRating: 4 out of 5 stars4/5 (2)
- Strategies for Problem Solving: Equip Kids to Solve Math Problems With ConfidenceFrom EverandStrategies for Problem Solving: Equip Kids to Solve Math Problems With ConfidenceNo ratings yet
- A-level Maths Revision: Cheeky Revision ShortcutsFrom EverandA-level Maths Revision: Cheeky Revision ShortcutsRating: 3.5 out of 5 stars3.5/5 (8)
- Fluent in 3 Months: How Anyone at Any Age Can Learn to Speak Any Language from Anywhere in the WorldFrom EverandFluent in 3 Months: How Anyone at Any Age Can Learn to Speak Any Language from Anywhere in the WorldRating: 3 out of 5 stars3/5 (79)
- Calculus Workbook For Dummies with Online PracticeFrom EverandCalculus Workbook For Dummies with Online PracticeRating: 3.5 out of 5 stars3.5/5 (8)
- Limitless Mind: Learn, Lead, and Live Without BarriersFrom EverandLimitless Mind: Learn, Lead, and Live Without BarriersRating: 4 out of 5 stars4/5 (6)
- How Math Explains the World: A Guide to the Power of Numbers, from Car Repair to Modern PhysicsFrom EverandHow Math Explains the World: A Guide to the Power of Numbers, from Car Repair to Modern PhysicsRating: 3.5 out of 5 stars3.5/5 (9)