You might also like
- 051 G04 PDFDocument9 pages051 G04 PDFinam vfNo ratings yet
- Stability Management of High Speed Axial Ow Compressor Stage Through Axial Extensions of Bend Skewed Casing TreatmentDocument14 pagesStability Management of High Speed Axial Ow Compressor Stage Through Axial Extensions of Bend Skewed Casing TreatmentBhaskar NandiNo ratings yet
- Response Spectrum Analysis of Pressure Vessel With Vertical OrientationDocument5 pagesResponse Spectrum Analysis of Pressure Vessel With Vertical OrientationviniciusschwabNo ratings yet
- Numerical Prediction of Stability Limit in Centrifugal Compressors With Vaneless DiffuserDocument9 pagesNumerical Prediction of Stability Limit in Centrifugal Compressors With Vaneless DiffuserMiguelMazzucchelliNo ratings yet
- Performance Evaluation of A Transonic Axial Compressor With Circumferential Casing GroovesDocument14 pagesPerformance Evaluation of A Transonic Axial Compressor With Circumferential Casing GroovesUmair MunirNo ratings yet
- 1 s2.0 S0957415821000830 MainDocument13 pages1 s2.0 S0957415821000830 MainBrunoNo ratings yet
- He, Zheng - 2017 - Mechanisms of Sweep On The Performance of Transonic Centrifugal Compressor ImpellersDocument22 pagesHe, Zheng - 2017 - Mechanisms of Sweep On The Performance of Transonic Centrifugal Compressor ImpellersXiao HeNo ratings yet
- Optimization of Discrete Cavities in A Centrifugal Compressor To Enhance Operating StabilityDocument12 pagesOptimization of Discrete Cavities in A Centrifugal Compressor To Enhance Operating StabilitySinan ÖrmeciNo ratings yet
- Rapid Measurements of Temperature and H O Concentration in IC Engines With A Spark Plug-Mounted Diode Laser SensorDocument9 pagesRapid Measurements of Temperature and H O Concentration in IC Engines With A Spark Plug-Mounted Diode Laser SensorCristian QuituizacaNo ratings yet
- Transonic Radial Compressor Inlet Design: A LohmbergDocument8 pagesTransonic Radial Compressor Inlet Design: A LohmbergEmandi RajeshNo ratings yet
- Bayley 1970Document7 pagesBayley 1970Huynhiemquoc80No ratings yet
- Vibration Analysis in Reciprocating CompressorsDocument11 pagesVibration Analysis in Reciprocating Compressorsakamalapuri388No ratings yet
- Numerical and Experimental Investigation of A Centrifugal Compressor With An Inducer Casing Bleed SystemDocument9 pagesNumerical and Experimental Investigation of A Centrifugal Compressor With An Inducer Casing Bleed SystemDhanasekar KNo ratings yet
- Design of Air Bearing For High Speed Micro Gas Turbine: M.MuruganandamDocument10 pagesDesign of Air Bearing For High Speed Micro Gas Turbine: M.MuruganandamChandu SunagNo ratings yet
- Velocity Measurements in The Near Field of A Radial SwirlerDocument8 pagesVelocity Measurements in The Near Field of A Radial SwirlerVignesh PanneerselvamNo ratings yet
- automatedShockTube Fuller19Document9 pagesautomatedShockTube Fuller19ennioNo ratings yet
- CFD Analysis of Swept and Leaned Transonic Compressor RotorDocument5 pagesCFD Analysis of Swept and Leaned Transonic Compressor RotorseventhsensegroupNo ratings yet
- Computational Analysis of Mixing in Scramjet Combustor Using Cross Flow Injection TechniqueDocument8 pagesComputational Analysis of Mixing in Scramjet Combustor Using Cross Flow Injection TechniqueTJPRC PublicationsNo ratings yet
- Numerical Investigation of Three-Dimensional Separation Control in An Axial Compressor CascadeDocument6 pagesNumerical Investigation of Three-Dimensional Separation Control in An Axial Compressor CascadeDeepakNarayananNo ratings yet
- Design of Test Rig For Swirl Measurement in I.C. EngineDocument4 pagesDesign of Test Rig For Swirl Measurement in I.C. EngineDhruv YadavNo ratings yet
- Ijret 110306033Document5 pagesIjret 110306033International Journal of Research in Engineering and TechnologyNo ratings yet
- Design and Analysis of Vertical Axis Wind Turbine Rotors: MD. Saddam Hussen, Dr. K. Rambabu, M. Ramji, E. SrinivasDocument9 pagesDesign and Analysis of Vertical Axis Wind Turbine Rotors: MD. Saddam Hussen, Dr. K. Rambabu, M. Ramji, E. SrinivasHaseeb UddinNo ratings yet
- A Review - Base Drag Reduction Methods On Flying Vehicles and AutomobilesDocument11 pagesA Review - Base Drag Reduction Methods On Flying Vehicles and Automobilesshivaprasad047No ratings yet
- Putra Adnan 2018 J. Phys. Conf. Ser. 1005 012026Document13 pagesPutra Adnan 2018 J. Phys. Conf. Ser. 1005 012026uma shankarNo ratings yet
- Internal Flow Analysis of A Dump Diffuser Using CFDDocument9 pagesInternal Flow Analysis of A Dump Diffuser Using CFDIJRASETPublicationsNo ratings yet
- 3 Ijmperdoct20193Document14 pages3 Ijmperdoct20193TJPRC PublicationsNo ratings yet
- Analysis of Cooling Gas Compressors Discharge Silencer: Dr. S. B. Wadkar, Viraj GhogreDocument7 pagesAnalysis of Cooling Gas Compressors Discharge Silencer: Dr. S. B. Wadkar, Viraj GhogreresearchinventyNo ratings yet
- Gas TurbineDocument6 pagesGas TurbineRicardo Carpio OssesNo ratings yet
- Development of Advanced Compressor Airfoils For Heavy-Duty Gas Turbines Part I: Design and OptimizationDocument10 pagesDevelopment of Advanced Compressor Airfoils For Heavy-Duty Gas Turbines Part I: Design and OptimizationermkermkNo ratings yet
- 1 s2.0 S1270963820308646 MainDocument12 pages1 s2.0 S1270963820308646 MainSrushtiNo ratings yet
- Sviluppo CompressoriDocument10 pagesSviluppo CompressoriFederico PinnaNo ratings yet
- Energies 15 02571 v2Document20 pagesEnergies 15 02571 v2Waqas AhmedNo ratings yet
- WindDocument13 pagesWindBoopathi KalaiNo ratings yet
- Numerical Investigation of Three-Dimensional Separation Control in An Axial Compressor CascadeDocument7 pagesNumerical Investigation of Three-Dimensional Separation Control in An Axial Compressor CascadeMohammad OmidiNo ratings yet
- Surrogate-Based Optimization of A Biplane Wells Turbine: Tapas K. Das and Abdus SamadDocument10 pagesSurrogate-Based Optimization of A Biplane Wells Turbine: Tapas K. Das and Abdus SamadMurali K oe16d017No ratings yet
- Compressor Discharge Check 1Document9 pagesCompressor Discharge Check 1rajeshbharatNo ratings yet
- Performance of Strongly Bowed Stators in A 4-Stage High Speed CompressorDocument7 pagesPerformance of Strongly Bowed Stators in A 4-Stage High Speed CompressorSamrrt zNo ratings yet
- Blade Oscillation Mechanism For Aerodynamic DampinDocument7 pagesBlade Oscillation Mechanism For Aerodynamic DampinaddictedtospeedNo ratings yet
- Squish and Swirl-Squish I+++++++++Document8 pagesSquish and Swirl-Squish I+++++++++Amal GargouriNo ratings yet
- Nu Rick 1976Document7 pagesNu Rick 1976XinDa ZhuNo ratings yet
- Blade Design and Performance Analysis of Wind TurbineDocument10 pagesBlade Design and Performance Analysis of Wind TurbineIJRASETPublicationsNo ratings yet
- Centrifugal Compressors in Ethylene PlantsDocument5 pagesCentrifugal Compressors in Ethylene PlantsForcus onNo ratings yet
- CFD Analysis of Savonius Vertical Axis Wind Turbine: A ReviewDocument5 pagesCFD Analysis of Savonius Vertical Axis Wind Turbine: A ReviewYan Felipe CavalcanteNo ratings yet
- Renewable Energy: Konrad Kacprzak, Grzegorz Liskiewicz, Krzysztof SobczakDocument8 pagesRenewable Energy: Konrad Kacprzak, Grzegorz Liskiewicz, Krzysztof Sobczakhassan zohairNo ratings yet
- Design Considerations For Thrust Bearing Applic Ations by James H. BallDocument18 pagesDesign Considerations For Thrust Bearing Applic Ations by James H. Ballmanjunath k sNo ratings yet
- Structural Health Monitoring of Offshore Jacket Structure SHM AnalysisDocument4 pagesStructural Health Monitoring of Offshore Jacket Structure SHM AnalysisArturoNo ratings yet
- 251-Article Text-452-1-10-20180925Document6 pages251-Article Text-452-1-10-20180925aravisara5No ratings yet
- 2 Okui - 3D OptDocument11 pages2 Okui - 3D OptAhmed FaridNo ratings yet
- Mechanism of Stall and Surge in A Centrifugal Compressor With A Variable Vaned DiffuserDocument10 pagesMechanism of Stall and Surge in A Centrifugal Compressor With A Variable Vaned DiffuserIsmail SakrNo ratings yet
- SPE 95162 New Horizons in Wide-Bore Drilling and Completion TechnologyDocument7 pagesSPE 95162 New Horizons in Wide-Bore Drilling and Completion TechnologydagingoNo ratings yet
- An Indicating Tachometer For Oceanographic Use: Ocean EngngDocument3 pagesAn Indicating Tachometer For Oceanographic Use: Ocean EngngSusilo Adi PutraNo ratings yet
- Experimental and Numerical Analysis of Different Aerodynamic Properties of Circular CylinderDocument6 pagesExperimental and Numerical Analysis of Different Aerodynamic Properties of Circular Cylinderpramo_dassNo ratings yet
- Strain Gauge Based Accelerometer PDFDocument13 pagesStrain Gauge Based Accelerometer PDFMarcell LandryNo ratings yet
- Screw Compressor Analysis From A VibrationDocument8 pagesScrew Compressor Analysis From A VibrationReza JabbarzadehNo ratings yet
- A Computational and Experimental Evaluation of The Performance of A Centrifugal Fan VoluteDocument12 pagesA Computational and Experimental Evaluation of The Performance of A Centrifugal Fan VoluteAli HusseiniNo ratings yet
- Dynamic Design CFD Simulation of Geometric Canister Gasifier StreamDocument9 pagesDynamic Design CFD Simulation of Geometric Canister Gasifier StreamIJRASETPublicationsNo ratings yet
- Orifice Plate Sizing Calculation Using A New Labview TechniqueDocument6 pagesOrifice Plate Sizing Calculation Using A New Labview TechniquesyamsulNo ratings yet
- Flight Test Instrumentation: Proceedings of the Third International Symposium 1964From EverandFlight Test Instrumentation: Proceedings of the Third International Symposium 1964M. A. PerryNo ratings yet
- One-Dimensional Compressible Flow: Thermodynamics and Fluid Mechanics SeriesFrom EverandOne-Dimensional Compressible Flow: Thermodynamics and Fluid Mechanics SeriesNo ratings yet
- Leaper-1A: Handy Digital IC TesterDocument1 pageLeaper-1A: Handy Digital IC TesterJon KiNo ratings yet
- Setup WizardDocument11 pagesSetup WizardMarlon CameyNo ratings yet
- 03-WS02A Linear Nonlinear Beam MAR101Document25 pages03-WS02A Linear Nonlinear Beam MAR101Jon KiNo ratings yet
- Compressor Reliability Improvement: SciencedirectDocument5 pagesCompressor Reliability Improvement: SciencedirectJon KiNo ratings yet
- Surface & Coatings Technology: Emerson Escobar Nunez, Seung Min Yeo, Kyriaki Polychronopoulou, Andreas A. PolycarpouDocument12 pagesSurface & Coatings Technology: Emerson Escobar Nunez, Seung Min Yeo, Kyriaki Polychronopoulou, Andreas A. PolycarpouJon KiNo ratings yet
- Tribological Characteristics of Various Surface Coatings For Rotary Compressor VaneDocument9 pagesTribological Characteristics of Various Surface Coatings For Rotary Compressor VaneJon KiNo ratings yet
- Applied Thermal Engineering: Giuseppe Bianchi, Roberto CipolloneDocument10 pagesApplied Thermal Engineering: Giuseppe Bianchi, Roberto CipolloneJon KiNo ratings yet
- SM Tec8300Document90 pagesSM Tec8300m.torresNo ratings yet
- ASUS X540SC - Repair GuideDocument5 pagesASUS X540SC - Repair GuideИван ТопчуNo ratings yet
- Unit Iv - The Microcontroller Connections 1.hardware Interface SequencingDocument9 pagesUnit Iv - The Microcontroller Connections 1.hardware Interface SequencingAshwin Prabhu .M VISTASNo ratings yet
- A100K10370 SPA-V2 Configuration Installation 2022Document54 pagesA100K10370 SPA-V2 Configuration Installation 2022Tio SatriaNo ratings yet
- Nodal AnalysisDocument1 pageNodal AnalysisSam Sepiol100% (1)
- Yamaha Mgp24x Mgp32xDocument43 pagesYamaha Mgp24x Mgp32xENGINEER 47No ratings yet
- Charger: Parts LocationDocument2 pagesCharger: Parts LocationSri SampathNo ratings yet
- Estimating and Costing Electrical Wiring PDFDocument45 pagesEstimating and Costing Electrical Wiring PDFYuvraj Gogoi100% (1)
- EL220 Signals and Systems: Experiment # 12Document6 pagesEL220 Signals and Systems: Experiment # 12Choudhary Abdul AqeelNo ratings yet
- TV Trouble Shooting Manual: Information Source 5Document9 pagesTV Trouble Shooting Manual: Information Source 5Rapelang SepekaNo ratings yet
- Design and Fabrication of 1550 NM Photonic Crystal Surface Emitting LasersDocument72 pagesDesign and Fabrication of 1550 NM Photonic Crystal Surface Emitting LasersMumba Patrick Jnr MpjNo ratings yet
- Service Manual MX522 Part List PDFDocument39 pagesService Manual MX522 Part List PDFરેતી વચ્ચે અને ચંદ્રNo ratings yet
- Ece Vii & ViiiDocument62 pagesEce Vii & Viiividhya dsNo ratings yet
- FMDS0504Document47 pagesFMDS0504Marius BuysNo ratings yet
- Solar Panel Umbrella - PresentationDocument25 pagesSolar Panel Umbrella - PresentationFAISAL ALBALAWINo ratings yet
- Cansat2020 1320 CDR v02Document225 pagesCansat2020 1320 CDR v02Dip ChakrabortyNo ratings yet
- TR IEC TS 62804-1-2019.previewDocument12 pagesTR IEC TS 62804-1-2019.previewFadhel GuesmiNo ratings yet
- 350W Single Output Switching Power SupplyDocument2 pages350W Single Output Switching Power SupplyJuan David Velasquez BranNo ratings yet
- Kri PDFDocument5 pagesKri PDFKrishna aug13No ratings yet
- Automated Queue ManagementDocument12 pagesAutomated Queue ManagementAbhishek SalunkeNo ratings yet
- Design and Implementation of GSM Based Automation of Household AppliancesDocument7 pagesDesign and Implementation of GSM Based Automation of Household Appliancesnur ain natasyaNo ratings yet
- Med Report FinalDocument96 pagesMed Report FinalRomain FaraüsNo ratings yet
- Esquema Lavadora DaewooDocument16 pagesEsquema Lavadora Daewoosalvador pichardoNo ratings yet
- Product Data Sheet: Im C13100, Cit Manu, Bàb UDocument2 pagesProduct Data Sheet: Im C13100, Cit Manu, Bàb ULuis Felipe Couto VarelaNo ratings yet
- Drafting SymbolsDocument10 pagesDrafting SymbolsDesign PewbinderyNo ratings yet
- Anderson'S Bridge & Schering'S BridgeDocument54 pagesAnderson'S Bridge & Schering'S BridgeSaad Bin MunirNo ratings yet
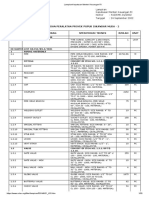
- LampiranKeputusan Menteri Keuangan RI Data PIM PDFDocument33 pagesLampiranKeputusan Menteri Keuangan RI Data PIM PDFkhomeinitjNo ratings yet
- Pre-Install Manual Lunar Prodigy (GE)Document44 pagesPre-Install Manual Lunar Prodigy (GE)patoNo ratings yet
- F2490Document8 pagesF2490John Amortegui100% (2)
- 1307204324list of AFD I Items Other Than Automobiles As On 13 Jul 2020Document9 pages1307204324list of AFD I Items Other Than Automobiles As On 13 Jul 2020Sudhir Kumar VermaNo ratings yet