You might also like
- Structural Dynamics and Earthquake EngineeringDocument76 pagesStructural Dynamics and Earthquake EngineeringGerman ToledoNo ratings yet
- 02 Introduction To Shock and VibrationDocument34 pages02 Introduction To Shock and Vibrationkostarica123100% (1)
- Types of Response and VibrationsDocument40 pagesTypes of Response and VibrationsGaluh Ayu PNo ratings yet
- Response Spectrum - Edited - 2Document102 pagesResponse Spectrum - Edited - 2Najeeb ShariffNo ratings yet
- Physics Formulas: Mechanics: Newton's Law of MotionDocument12 pagesPhysics Formulas: Mechanics: Newton's Law of Motionatyalo11No ratings yet
- Raphex 2010 PDFDocument26 pagesRaphex 2010 PDFYong Fang Yue100% (1)
- Rotational Motion Iit JeeDocument23 pagesRotational Motion Iit JeeSahil0% (1)
- Companies in EgyptDocument35 pagesCompanies in EgyptSahar Aktham RashedNo ratings yet
- AP1 Rotational Motion Presenter W Answers PDFDocument34 pagesAP1 Rotational Motion Presenter W Answers PDFMisakiNo ratings yet
- July 28 - Introduction To Structural Dynamics Dr. HW Huang PDFDocument52 pagesJuly 28 - Introduction To Structural Dynamics Dr. HW Huang PDFurvishNo ratings yet
- Chapter 1 - Free VibrationDocument77 pagesChapter 1 - Free VibrationNaftali Junior NaukushuNo ratings yet
- RM 09 - Physics For Engineers (Part 02)Document2 pagesRM 09 - Physics For Engineers (Part 02)usueNo ratings yet
- CEI SD 100 Structural Dynamics LR02newDocument23 pagesCEI SD 100 Structural Dynamics LR02newSahar Aktham RashedNo ratings yet
- Chapter 1 Fundamentals of Turbulent JetDocument42 pagesChapter 1 Fundamentals of Turbulent JetMutlu ElmasNo ratings yet
- MEC521 - Chapter 2Document27 pagesMEC521 - Chapter 2Hafizudin DaudNo ratings yet
- Structural Dynamics 構造動力学Document16 pagesStructural Dynamics 構造動力学rusvelthchristianNo ratings yet
- Implementation of Human Vibration Test and Evaluation System Based On Virtual InstrumentDocument6 pagesImplementation of Human Vibration Test and Evaluation System Based On Virtual Instrumentfaqih subyktoNo ratings yet
- W5 Kinetics of Particle Impulse Momentum (Ch15)Document74 pagesW5 Kinetics of Particle Impulse Momentum (Ch15)Shah KhanNo ratings yet
- Module 4 Kinetics of A Particle-Impulse and MomentumDocument72 pagesModule 4 Kinetics of A Particle-Impulse and MomentumHuy VũNo ratings yet
- Class 11 Physics Notes Chapter 10 Studyguide360Document44 pagesClass 11 Physics Notes Chapter 10 Studyguide360krithicksenthilvelanNo ratings yet
- EE L02 SDOF Dynamics r13Document57 pagesEE L02 SDOF Dynamics r13Engr Aizaz AhmadNo ratings yet
- Validation Natural Frequency of A Simply Supported Beam 2016Document2 pagesValidation Natural Frequency of A Simply Supported Beam 2016Anonymous 17ihTauS5No ratings yet
- Aakash 02 - Description of Motion in One DimensionDocument8 pagesAakash 02 - Description of Motion in One DimensionAshish RanjanNo ratings yet
- SCIA5202Document67 pagesSCIA52022BA19CV059 Rakshita SarangmathNo ratings yet
- Dynamics: 1.1 KineticsDocument53 pagesDynamics: 1.1 Kineticsparmeshwar khendakeNo ratings yet
- Basics of Vibration DynamicsDocument41 pagesBasics of Vibration DynamicshahahaNo ratings yet
- AS Level KinematicsDocument13 pagesAS Level Kinematicsaykhan5806No ratings yet
- FCE 401 Chapter 1 and 2Document34 pagesFCE 401 Chapter 1 and 2carl ingariNo ratings yet
- Ch15 - 1 - Impulse&MomentumDocument19 pagesCh15 - 1 - Impulse&MomentumJacinta SamalengiNo ratings yet
- UNIT-1 Analogy QuestionsDocument13 pagesUNIT-1 Analogy QuestionsPriyank SrivastavaNo ratings yet
- Lecture 4 NotesDocument36 pagesLecture 4 Notesahmed11 engyemenNo ratings yet
- Strength of Material (Revised) : Numericals Based On Frames Basic ConceptDocument47 pagesStrength of Material (Revised) : Numericals Based On Frames Basic ConceptSantosh PandeyNo ratings yet
- Experimental Report 2: F M D V D P M V F D PDocument8 pagesExperimental Report 2: F M D V D P M V F D PThành NguyễnNo ratings yet
- Accelerometers PDFDocument4 pagesAccelerometers PDFKillburnNo ratings yet
- 7.IITD 2012 Theory of VibrationDocument9 pages7.IITD 2012 Theory of Vibrationlaith adnanNo ratings yet
- Ce 6102: Structural Dynamics: Lecture Notes-1: Introduction (Version 2.1)Document8 pagesCe 6102: Structural Dynamics: Lecture Notes-1: Introduction (Version 2.1)sb1966No ratings yet
- 2 Description of Motion in One DimensionDocument11 pages2 Description of Motion in One Dimensionsoumengoswami10No ratings yet
- 8.1 Charge and Energy 8.1.1 The Continuity EquationDocument31 pages8.1 Charge and Energy 8.1.1 The Continuity Equationlevi74108520963No ratings yet
- Dynamics: Principles of Linear Impulse and MomentumDocument17 pagesDynamics: Principles of Linear Impulse and MomentumVinot EsanNo ratings yet
- CH 01, Introduction To Mechanical VibrationsDocument35 pagesCH 01, Introduction To Mechanical VibrationsAtalelew ZeruNo ratings yet
- Hibb 11e Dynamics Lecture Section 15-01 RDocument21 pagesHibb 11e Dynamics Lecture Section 15-01 RNikkei Pfeiffer TadiliNo ratings yet
- 4.5 Vibrations and Impact of Machinery and Equipment: Resonance. 4.5.1.1 FatigueDocument10 pages4.5 Vibrations and Impact of Machinery and Equipment: Resonance. 4.5.1.1 FatigueSuresh nathanNo ratings yet
- Dynamic Response of Moving LoadDocument31 pagesDynamic Response of Moving LoadSolomon AhimbisibweNo ratings yet
- Problem 3 Cooling Atoms by Laser: Is Given by "VDocument2 pagesProblem 3 Cooling Atoms by Laser: Is Given by "VEdi nbaNo ratings yet
- System DynamicsDocument18 pagesSystem DynamicsGthulasi78No ratings yet
- Phase2 Constitutive Model VerificationDocument36 pagesPhase2 Constitutive Model VerificationMarcos MaNo ratings yet
- Beam Experiment HandoutDocument10 pagesBeam Experiment HandoutArun KumarNo ratings yet
- 954 - Vibration Measurement With Piezoelectric TransducerDocument4 pages954 - Vibration Measurement With Piezoelectric TransducerManik SinghNo ratings yet
- Theory of Vibrations - Saran - Soil Dynamics and Machine FoundationDocument52 pagesTheory of Vibrations - Saran - Soil Dynamics and Machine Foundationshivabtowin3301100% (1)
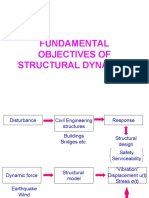
- Fundamental Objectives of Structural DynamicsDocument11 pagesFundamental Objectives of Structural DynamicsikramNo ratings yet
- Lecture 1 SD Introduction 2023Document52 pagesLecture 1 SD Introduction 2023Uttam KarkeeNo ratings yet
- PohlsDocument13 pagesPohlsniyathi637No ratings yet
- (A) (B) (C) (D) : Structural Dynamics (CEI SD-100)Document4 pages(A) (B) (C) (D) : Structural Dynamics (CEI SD-100)Sahar Aktham RashedNo ratings yet
- Physics PDFDocument107 pagesPhysics PDFAman DesaiNo ratings yet
- Spring Mass Experiment Student SheetDocument8 pagesSpring Mass Experiment Student SheetThảo Hà NguyễnNo ratings yet
- Slides.2.dynamics Lund 2017 Tomasi PDFDocument22 pagesSlides.2.dynamics Lund 2017 Tomasi PDFAnil KumarNo ratings yet
- Work EnergyDocument46 pagesWork Energywww.gulraizsaadiNo ratings yet
- Lecture L9 - Linear Impulse and Momentum. CollisionsDocument13 pagesLecture L9 - Linear Impulse and Momentum. Collisionsspd bahrilNo ratings yet
- Physics 1:: MechanicsDocument21 pagesPhysics 1:: MechanicsTrần Xuân QuỳnhNo ratings yet
- Green's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)From EverandGreen's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)No ratings yet
- Practical Training 01Document4 pagesPractical Training 01Sahar Aktham RashedNo ratings yet
- CEI SD 100 Structural Dynamics LR05 NewDocument29 pagesCEI SD 100 Structural Dynamics LR05 NewSahar Aktham RashedNo ratings yet
- CEI SD 100 Structural Dynamics LR03 NewDocument28 pagesCEI SD 100 Structural Dynamics LR03 NewSahar Aktham RashedNo ratings yet
- Practical Training 02Document3 pagesPractical Training 02Sahar Aktham RashedNo ratings yet
- CEI SD 100 Structural Dynamics LR06 NewDocument24 pagesCEI SD 100 Structural Dynamics LR06 NewSahar Aktham RashedNo ratings yet
- Structural Dynamics (CEI SD-100) : Civil Engineering Informatics Program Information Technology InstituteDocument2 pagesStructural Dynamics (CEI SD-100) : Civil Engineering Informatics Program Information Technology InstituteSahar Aktham RashedNo ratings yet
- CEI SD 100 Structural Dynamics LR04 NewDocument20 pagesCEI SD 100 Structural Dynamics LR04 NewSahar Aktham RashedNo ratings yet
- (A) (B) (C) (D) : Structural Dynamics (CEI SD-100)Document4 pages(A) (B) (C) (D) : Structural Dynamics (CEI SD-100)Sahar Aktham RashedNo ratings yet
- Civil Engineering Informatics Program Information Technology InstituteDocument1 pageCivil Engineering Informatics Program Information Technology InstituteSahar Aktham RashedNo ratings yet
- Civil Engineering Informatics Program Information Technology InstituteDocument2 pagesCivil Engineering Informatics Program Information Technology InstituteSahar Aktham RashedNo ratings yet
- Units and Conversions: Transactions of The Institute of Metal Finishing January 1992Document4 pagesUnits and Conversions: Transactions of The Institute of Metal Finishing January 1992Sahar Aktham RashedNo ratings yet
- Numerical Evaluation of Seismic Response of Asymmetrical Reinforced Concrete Frame BuildingsDocument6 pagesNumerical Evaluation of Seismic Response of Asymmetrical Reinforced Concrete Frame BuildingsSahar Aktham RashedNo ratings yet
- Tenses PDFDocument2 pagesTenses PDFSahar Aktham RashedNo ratings yet
- Egyptian Code Details - MNDocument132 pagesEgyptian Code Details - MNSahar Aktham RashedNo ratings yet
- Structural OptimizationDocument54 pagesStructural OptimizationSahar Aktham RashedNo ratings yet
- Sigmund Presentation Dls Hs 15Document16 pagesSigmund Presentation Dls Hs 15Sahar Aktham RashedNo ratings yet
- Paper 2 Past Questions From Units and Measurements - CompletedDocument17 pagesPaper 2 Past Questions From Units and Measurements - CompletedUzair MalikNo ratings yet
- Water Consumption of Cooling Towers ASME Power 2015Document5 pagesWater Consumption of Cooling Towers ASME Power 2015Zaka ZaheeriNo ratings yet
- Acoustics - QuestionnaireDocument8 pagesAcoustics - QuestionnaireLorenz ArdienteNo ratings yet
- GATE PYQs of ConductionDocument134 pagesGATE PYQs of ConductionABHAYNo ratings yet
- Assignment 2Document5 pagesAssignment 2Muhammad AsyrafNo ratings yet
- Peer AssessmentDocument47 pagesPeer AssessmentUmair Ejaz ButtNo ratings yet
- Fluid MechanicsDocument103 pagesFluid MechanicsRahmanNo ratings yet
- Lidar Technologies and Systems SPIE BOOKDocument523 pagesLidar Technologies and Systems SPIE BOOKyjh63601No ratings yet
- Interference LightDocument36 pagesInterference Lightvishwanath c kNo ratings yet
- Bernoulli ExperimentDocument4 pagesBernoulli ExperimentmahabubNo ratings yet
- The Diffraction Grating To Measure The Wavelength of LightDocument7 pagesThe Diffraction Grating To Measure The Wavelength of LightVAIBHAV KUMARNo ratings yet
- Projectile Motion 2Document21 pagesProjectile Motion 2maryjeanquiambao4No ratings yet
- Flow Induced Vibrations: March 2006Document12 pagesFlow Induced Vibrations: March 2006Gustavo SanabriaNo ratings yet
- Product Data - Sound Intensity Probe Kit - Type 3599, Sound Intensity Microphone Pair - Type 4197, Dual Preamplifier - Type 2683 (Bp1880)Document8 pagesProduct Data - Sound Intensity Probe Kit - Type 3599, Sound Intensity Microphone Pair - Type 4197, Dual Preamplifier - Type 2683 (Bp1880)DanielSierraNo ratings yet
- ECSS E ST 10 12C (15november2008) +corr.1 (22february2017)Document106 pagesECSS E ST 10 12C (15november2008) +corr.1 (22february2017)jsadachiNo ratings yet
- Unit VI Heat - ExchangerDocument144 pagesUnit VI Heat - ExchangerSyed YousufuddinNo ratings yet
- 10.1109 ICMMT.2016.7762381 Design of Dual Circularly Polarized Substrate Integrated Waveguide Horn AntennaDocument3 pages10.1109 ICMMT.2016.7762381 Design of Dual Circularly Polarized Substrate Integrated Waveguide Horn Antennagh_jazaniNo ratings yet
- Material Characterization Lab 2Document7 pagesMaterial Characterization Lab 2siddant vardeyNo ratings yet
- UNIT5-Ground Wave Propagation PDFDocument44 pagesUNIT5-Ground Wave Propagation PDFRameshbabu SadineniNo ratings yet
- Vectorial Representation of Harmonic MotionsDocument10 pagesVectorial Representation of Harmonic MotionsI Nyoman BudirtaNo ratings yet
- Modul Superb Ting 4 Bab 2Document31 pagesModul Superb Ting 4 Bab 2NORASLINDA BINTI KARNAIN MoeNo ratings yet
- Lecture7 PDFDocument5 pagesLecture7 PDFrashidNo ratings yet
- Reduced Syllabus of JEE Main 2024 - Physics-1698910501601Document5 pagesReduced Syllabus of JEE Main 2024 - Physics-1698910501601manavsharma17012006No ratings yet
- IAT2 Question Paper AMEDocument5 pagesIAT2 Question Paper AMEbalaji sivaNo ratings yet
- C26527 BSC Physics Question PaperDocument2 pagesC26527 BSC Physics Question PaperPhysicsQuestionNo ratings yet
- CUCET 2020 Question PaperDocument24 pagesCUCET 2020 Question Papersreejitha KNo ratings yet
- Starled 3Document2 pagesStarled 3Instrulife OostkampNo ratings yet
- Structural Dynamics Hw2 - SolDocument6 pagesStructural Dynamics Hw2 - SolmostafaNo ratings yet
- C10 - Mechanical and Sound WavesDocument27 pagesC10 - Mechanical and Sound WavesAzmira AhmadNo ratings yet