You might also like
- Reflection/Refraction Seismology: SynonymsDocument15 pagesReflection/Refraction Seismology: SynonymsUthman MohammedNo ratings yet
- Reflection/Refraction Seismology: SynonymsDocument15 pagesReflection/Refraction Seismology: SynonymsMithunNo ratings yet
- Probing The SeafloorDocument10 pagesProbing The SeafloorPappu DiaNo ratings yet
- Oil and Gas Exploration Methods: Geological & GeophysicalDocument7 pagesOil and Gas Exploration Methods: Geological & GeophysicalAsad KhanNo ratings yet
- What Is Seismic SurveyingDocument15 pagesWhat Is Seismic SurveyingMajid NajeebNo ratings yet
- Geophyiscs - NotesDocument13 pagesGeophyiscs - NotesHugo DuchovnyNo ratings yet
- Contoh Journal ReviewDocument6 pagesContoh Journal ReviewMuchammad Misbachul MunirNo ratings yet
- GEOPHYSICS - SeismicDocument34 pagesGEOPHYSICS - SeismicDarveen Vijayan100% (1)
- A Beginner's Guide To Seismic Re Ections: EditorDocument2 pagesA Beginner's Guide To Seismic Re Ections: EditorNorberto Escobar MoralesNo ratings yet
- Keiswetter HammerSource S-TR294Document33 pagesKeiswetter HammerSource S-TR294Ivannia Solano AguilarNo ratings yet
- A Historical Reflection On Reflections: B D, Westerngeco, Houston, UsaDocument25 pagesA Historical Reflection On Reflections: B D, Westerngeco, Houston, UsaVictor HernanNo ratings yet
- Metode Seismik RefraksiDocument55 pagesMetode Seismik RefraksiMasri RazakNo ratings yet
- Seismic ReflectionDocument21 pagesSeismic Reflectionvelkus2013No ratings yet
- Field Geophysics Presentaion 2Document18 pagesField Geophysics Presentaion 2Leroy MufadziNo ratings yet
- Introduction to Geophysics Short Course Refraction SeismologyDocument16 pagesIntroduction to Geophysics Short Course Refraction SeismologyJunaid AzharNo ratings yet
- Seisnotes PDFDocument70 pagesSeisnotes PDFvenkatanagachandraNo ratings yet
- GeophysicsDocument64 pagesGeophysicsrizkaNo ratings yet
- Seismic RefractionDocument16 pagesSeismic RefractionOdame Bernard AppiahNo ratings yet
- Seismic Data ProcessingDocument117 pagesSeismic Data ProcessingStart Back100% (3)
- Crewes CodesDocument38 pagesCrewes CodesHuu Van TranNo ratings yet
- Lecture 4B Year 3-Sounding - Depth DeterminationDocument19 pagesLecture 4B Year 3-Sounding - Depth Determinationlegendibra8No ratings yet
- تقرير الفاونديشن PDFDocument6 pagesتقرير الفاونديشن PDFHosam ObaidNo ratings yet
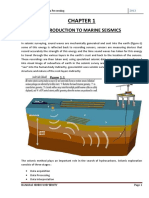
- Final Dissertation Introduction To Marine Seismics PDFDocument66 pagesFinal Dissertation Introduction To Marine Seismics PDFjast5No ratings yet
- Sonar Systems and Their Many UsesDocument4 pagesSonar Systems and Their Many UsesshirtquittersNo ratings yet
- Seismic Survey MethodDocument100 pagesSeismic Survey MethodRimsha AhmedNo ratings yet
- Lankston Refraction TR102Document55 pagesLankston Refraction TR102Harold G. Velasquez SanchezNo ratings yet
- History of Formation Evaluation: Petroleum PetroleumDocument6 pagesHistory of Formation Evaluation: Petroleum PetroleumBing Perez CuetoNo ratings yet
- Method Statement of Hybrid Seismic SurveyingDocument12 pagesMethod Statement of Hybrid Seismic SurveyingsomrupNo ratings yet
- Lecture Notes - 4a Sounding - Depth DeterminationDocument19 pagesLecture Notes - 4a Sounding - Depth Determinationlegendibra8No ratings yet
- Seismic Method in The ExplorationDocument3 pagesSeismic Method in The ExplorationRahmat Fadhilah100% (2)
- Marine Geological Surveying and SamplingDocument168 pagesMarine Geological Surveying and SamplingtracksolucionesNo ratings yet
- The Development of the Multibeam Echosounder: A Historical AccountDocument2 pagesThe Development of the Multibeam Echosounder: A Historical AccountKim Kiki ZaenuriNo ratings yet
- Shooting Seismic Surveys in CirclesDocument14 pagesShooting Seismic Surveys in CirclesRidwanNo ratings yet
- Materi Seminar 3 GeofisikaRevDocument51 pagesMateri Seminar 3 GeofisikaRevFatimah HuseinNo ratings yet
- Shallowwater Acoustics: Additional Resources For Physics TodayDocument8 pagesShallowwater Acoustics: Additional Resources For Physics TodayPmrajeshwari MaiNo ratings yet
- What Is Measured During A Seismic SurveyDocument15 pagesWhat Is Measured During A Seismic SurveyWormixs MasterNo ratings yet
- General Facts About The Lidar TechniqueDocument29 pagesGeneral Facts About The Lidar TechniqueCirkuito100% (1)
- Petroleum Exploration Methods GuideDocument7 pagesPetroleum Exploration Methods GuideHassan AkbarNo ratings yet
- Asignment Seismic SurveyDocument15 pagesAsignment Seismic SurveyRimsha AhmedNo ratings yet
- MASW Sumary of Technical Aspects - KGS-97-10Document26 pagesMASW Sumary of Technical Aspects - KGS-97-10Antonio Enriquez ArvizuNo ratings yet
- Comparison of Geophysical Shear-Wave Methods - Molnar Et AlDocument11 pagesComparison of Geophysical Shear-Wave Methods - Molnar Et AlgeochuyNo ratings yet
- Fonseca 07 MGR Remote Estimation of Surficial Seafloor Properties Through Angular Range Analysis PDFDocument8 pagesFonseca 07 MGR Remote Estimation of Surficial Seafloor Properties Through Angular Range Analysis PDFazhafizNo ratings yet
- SONAR Presentation: History, Types, and ApplicationsDocument45 pagesSONAR Presentation: History, Types, and ApplicationsTejassarwajna DegalaNo ratings yet
- Introduction Into Seismic SurveyDocument42 pagesIntroduction Into Seismic Surveyabuobida100% (1)
- Micrdseisms in Geothermal Exploration-Studies in Grass Valley, NevadaDocument19 pagesMicrdseisms in Geothermal Exploration-Studies in Grass Valley, NevadaAS LCNo ratings yet
- Geophysical Measuring InsttrumentsDocument4 pagesGeophysical Measuring InsttrumentsIrfan ShaikNo ratings yet
- Reviews: TechnicalDocument14 pagesReviews: TechnicalErdinc SayginNo ratings yet
- The Seismic Method - Principles and Applications Geology ScienceDocument16 pagesThe Seismic Method - Principles and Applications Geology ScienceKumar PtlNo ratings yet
- BathymetryDocument3 pagesBathymetrySekhar Reddy100% (1)
- Ali Ismet Kanlı Geophysics 2020Document138 pagesAli Ismet Kanlı Geophysics 2020Anonymous gq7UQAwNo ratings yet
- Geophysics For GeologistsDocument175 pagesGeophysics For GeologistsyunusjanNo ratings yet
- Apply Geophysics Methods Landslide Glacier Hazard PlanningDocument16 pagesApply Geophysics Methods Landslide Glacier Hazard PlanningLama Al KurdiNo ratings yet
- NGA RefractionDocument2 pagesNGA RefractionJubilee316No ratings yet
- 10 Remote Sensing, Geophysics and PetrophysicsDocument11 pages10 Remote Sensing, Geophysics and PetrophysicsByron VictoriaNo ratings yet
- Concept Study of Radar Sensors For Near-Field Tsunami Early WarningDocument8 pagesConcept Study of Radar Sensors For Near-Field Tsunami Early WarningcimasukNo ratings yet
- Tomografi Gelombang Untuk GeoteknikDocument8 pagesTomografi Gelombang Untuk Geoteknikgunadi SuryoNo ratings yet
- Dierssen 2014 ENRMethods ColorDocument9 pagesDierssen 2014 ENRMethods ColorDeepak KumarNo ratings yet
- Basic Geophysical Exploration Print OooDocument7 pagesBasic Geophysical Exploration Print Oootahsim laptopNo ratings yet
- Omni 3D Workshop Tutorial: 3D Ray Tracing and Analysis (May 2009)Document12 pagesOmni 3D Workshop Tutorial: 3D Ray Tracing and Analysis (May 2009)MithunNo ratings yet
- Low Frequency Seismic AnalysisDocument8 pagesLow Frequency Seismic AnalysisMithunNo ratings yet
- Statistical Learning - Measures of DataDocument61 pagesStatistical Learning - Measures of DataArminSayadiNo ratings yet
- 10.7569 Jsee.2018.629506Document13 pages10.7569 Jsee.2018.629506MithunNo ratings yet
- Batch V 2021 ST Training List (Production) : Designation POPDocument6 pagesBatch V 2021 ST Training List (Production) : Designation POPMithunNo ratings yet
- Omni 3D: Seismic Survey Design SoftwareDocument8 pagesOmni 3D: Seismic Survey Design SoftwareMithun100% (1)
- CREWES Computer SystemsDocument11 pagesCREWES Computer SystemsMithunNo ratings yet
- Car AdvanceDocument15 pagesCar AdvanceOmkar GhoriNo ratings yet
- CREWES Computer SystemsDocument11 pagesCREWES Computer SystemsMithunNo ratings yet
- No. ONGC/ER/CP/: MED/01 0 Office Order Dated 26th September, 2007Document5 pagesNo. ONGC/ER/CP/: MED/01 0 Office Order Dated 26th September, 2007MithunNo ratings yet
- CREWES Computer SystemsDocument11 pagesCREWES Computer SystemsMithunNo ratings yet
- Maximum Likelihood Inversion of Simulated LOFAR Data: Abhik Ghosh and Léon V. E. KoopmansDocument2 pagesMaximum Likelihood Inversion of Simulated LOFAR Data: Abhik Ghosh and Léon V. E. KoopmansMithunNo ratings yet
- New Ul 4Document6 pagesNew Ul 4MithunNo ratings yet
- GE-4550 Gravity and Magnetic Interpretation MethodsDocument2 pagesGE-4550 Gravity and Magnetic Interpretation MethodsMithunNo ratings yet
- Reservoir FluidsDocument13 pagesReservoir Fluidsdjnaeem100% (1)
- High Resistivity, High Water SaturationDocument7 pagesHigh Resistivity, High Water SaturationJair NaranjoNo ratings yet
- 11 23 2020 16.58.13 PDFDocument1 page11 23 2020 16.58.13 PDFMithunNo ratings yet
- Phase Diagrams: Understanding Equilibrium StatesDocument13 pagesPhase Diagrams: Understanding Equilibrium StatesPatric PinheiroNo ratings yet
- 7 AttribDocument46 pages7 AttribMithunNo ratings yet
- True Polar Wander: Description in The Context of EarthDocument3 pagesTrue Polar Wander: Description in The Context of EarthMithunNo ratings yet
- Partial SRME method models surface multiples in a single passDocument4 pagesPartial SRME method models surface multiples in a single passMithunNo ratings yet
- General Introduction To Airborne Magnetic Survey PDFDocument15 pagesGeneral Introduction To Airborne Magnetic Survey PDFMithunNo ratings yet
- Two-Term AVO Inversion: Equivalences and New Methods: Charles P. Ursenbach and Robert R. StewartDocument8 pagesTwo-Term AVO Inversion: Equivalences and New Methods: Charles P. Ursenbach and Robert R. StewartMithunNo ratings yet
- Seismic Imaging - Prestack - CSEG RECORDERDocument23 pagesSeismic Imaging - Prestack - CSEG RECORDERMithunNo ratings yet
- Optimisation of Parameters in Seismic Data Acquisition For Better Subsurface Imaging in Eastern Gamij, GujaratDocument7 pagesOptimisation of Parameters in Seismic Data Acquisition For Better Subsurface Imaging in Eastern Gamij, GujaratMithunNo ratings yet
- Henderson 1949Document18 pagesHenderson 1949MithunNo ratings yet
- Seismic Attributes - CSEG RECORDERDocument15 pagesSeismic Attributes - CSEG RECORDERMithunNo ratings yet
- Too Many Seismic Attributes? Discard Duplicates and Unclear MeasuresDocument11 pagesToo Many Seismic Attributes? Discard Duplicates and Unclear MeasuresMithunNo ratings yet
- Alfa Laval Manual Mopx 213 PDFDocument224 pagesAlfa Laval Manual Mopx 213 PDFMARCO VERAMENDI100% (1)
- Effect of Asphaltene and Resins On The Stability of Water-In-Waxy Oil EmulsionsDocument20 pagesEffect of Asphaltene and Resins On The Stability of Water-In-Waxy Oil EmulsionsSoleiman ChatrsimabNo ratings yet
- Support 3Document15 pagesSupport 3Shreyas AlagundiNo ratings yet
- 1 Multi-Phase Flow Analysis in Oil and Gas Engineering Systems and Its Model PDFDocument5 pages1 Multi-Phase Flow Analysis in Oil and Gas Engineering Systems and Its Model PDFWesam Al shoumariNo ratings yet
- Simple Kinetic Molecular Model of Matter 2 QPDocument11 pagesSimple Kinetic Molecular Model of Matter 2 QPDương TửNo ratings yet
- Tic Tac Toe Choice BoardDocument2 pagesTic Tac Toe Choice Boardapi-529100008No ratings yet
- Precision and Laboratory EquipmentsDocument33 pagesPrecision and Laboratory EquipmentsTone RatanalertNo ratings yet
- Cooling Towers Improve HVAC EfficiencyDocument18 pagesCooling Towers Improve HVAC EfficiencyHarjo Wiyono100% (1)
- MCQ LasersDocument9 pagesMCQ LasersMADHAVNo ratings yet
- Galilean and Aristotelian MotionDocument2 pagesGalilean and Aristotelian MotionAliah Colleen V. AgnesNo ratings yet
- Machine Design Problems With SolutionsDocument27 pagesMachine Design Problems With SolutionsMarcial Jr. MilitanteNo ratings yet
- 2015-11-02 Seminar - Siruri Si Serii de FunctiiDocument2 pages2015-11-02 Seminar - Siruri Si Serii de FunctiiȘtefan RăzvanNo ratings yet
- Transmission and Reflection of Deep Water Waves From A Submerged BreakwaterDocument223 pagesTransmission and Reflection of Deep Water Waves From A Submerged BreakwaterAzisNo ratings yet
- TRB Physics Study MaterialDocument29 pagesTRB Physics Study MaterialKanthavel Thillai0% (2)
- EML 6155 Convection Heat TransferDocument4 pagesEML 6155 Convection Heat TransfermasumehtfNo ratings yet
- Tri-Bore PVDF Hollow Fibers With A Super-Hydrophobic Coating For Membrane DistillationDocument11 pagesTri-Bore PVDF Hollow Fibers With A Super-Hydrophobic Coating For Membrane DistillationKellyNo ratings yet
- Cambridge International AS & A Level Electrolysis of WaterDocument1 pageCambridge International AS & A Level Electrolysis of WaterSadhanshyhan ShyhanNo ratings yet
- Colorimetry & SpectrophotometrDocument30 pagesColorimetry & SpectrophotometrBadruzzaman BarbhuiyaNo ratings yet
- Chemistry for Engineers Lab ReviewerDocument10 pagesChemistry for Engineers Lab ReviewerCarl Tyrone DizonNo ratings yet
- Izn Two Stage CompressorDocument2 pagesIzn Two Stage CompressorLhexter Mhervin CoNo ratings yet
- Interaction of O2 With Reduced Ceria Nanoparticles at 100-400 K: Fast Oxidation of Ce3+ Ions and Dissolved H2Document28 pagesInteraction of O2 With Reduced Ceria Nanoparticles at 100-400 K: Fast Oxidation of Ce3+ Ions and Dissolved H2Константин ХаджиивановNo ratings yet
- Report TextDocument9 pagesReport TextAgoes VigliosiNo ratings yet
- Jardine Et All (1986)Document20 pagesJardine Et All (1986)jorge.jimenezNo ratings yet
- JEE Main 2023 Jan 24th Morning Shift - Physics: QuestionsDocument14 pagesJEE Main 2023 Jan 24th Morning Shift - Physics: Questionsychiru540No ratings yet
- INTRODUCTION NoiseDocument3 pagesINTRODUCTION NoiseAinaaaaNo ratings yet
- AnnexureDocument3 pagesAnnexureqamarNo ratings yet
- DMM PDFDocument6 pagesDMM PDFtarunNo ratings yet
- 973-SF Analyzer: Laboratory Precision - Field ReadyDocument4 pages973-SF Analyzer: Laboratory Precision - Field ReadymersiumNo ratings yet
- Determining the Wavelength of Light Using InterferenceDocument3 pagesDetermining the Wavelength of Light Using InterferenceSuman_SamadderNo ratings yet
- ECE CablesDocument192 pagesECE CablesshenshNo ratings yet