You might also like
- Mother Teresa JerseyDocument2 pagesMother Teresa JerseyTanya van Zyl100% (1)
- Arduino Project Report (Smart Pedestrian Light)Document16 pagesArduino Project Report (Smart Pedestrian Light)Shaikhan Nadzemi100% (1)
- Arduino Project ReportDocument16 pagesArduino Project ReportBroAmirNo ratings yet
- Reverse Car Parking System Using Arduino: A Synopsis Report OnDocument18 pagesReverse Car Parking System Using Arduino: A Synopsis Report OnShraddha TamhaneNo ratings yet
- Practice Quiz M1 (Ungraded) - MergedDocument22 pagesPractice Quiz M1 (Ungraded) - MergedAbdullah Abdullah100% (1)
- The Respiratory System - Freebie GuideDocument4 pagesThe Respiratory System - Freebie GuideIndustria Quimica0% (1)
- Aamer Report SeminarDocument27 pagesAamer Report SeminarRohith NarayanNo ratings yet
- Final ReportDocument51 pagesFinal ReportGOWTHAM KNo ratings yet
- Certificate: Entr Oll NoDocument20 pagesCertificate: Entr Oll NoSmit PankhaniaNo ratings yet
- Dr.P.Kavitha Rani, PH.D: Autonomous Car Using Artificial Intelligence and LidarDocument29 pagesDr.P.Kavitha Rani, PH.D: Autonomous Car Using Artificial Intelligence and LidarGovardhan DigumurthiNo ratings yet
- Technical ReportDocument21 pagesTechnical Reportneeraj kumarNo ratings yet
- Drunken Driving Vehicle Avoiding System Using Arduino: Bachelor of TechnologyDocument33 pagesDrunken Driving Vehicle Avoiding System Using Arduino: Bachelor of TechnologyShashank KundenaNo ratings yet
- Mayank FinalprojectDocument74 pagesMayank FinalprojectPathikrit GuhaNo ratings yet
- A Project Report On "Smart Cap For Fatigue Drivers": Bachelor of TechnologyDocument6 pagesA Project Report On "Smart Cap For Fatigue Drivers": Bachelor of Technologyavik mukherjeeNo ratings yet
- Using Rfid: Electronics and Communication EngineeringDocument7 pagesUsing Rfid: Electronics and Communication EngineeringSunil PalNo ratings yet
- Accident Driver Assistance System WithDocument70 pagesAccident Driver Assistance System WithFATHIMA HAKKEEMNo ratings yet
- Fabrication of Inbuilt Electro Hydraulic JackDocument43 pagesFabrication of Inbuilt Electro Hydraulic JackAvishek SaraogiNo ratings yet
- Smit PR Sem 6Document13 pagesSmit PR Sem 6Iron man SafariNo ratings yet
- Vehicle Trackingusing Io TDocument22 pagesVehicle Trackingusing Io TMD. Akif RahmanNo ratings yet
- Abhishak PR Sem 6Document13 pagesAbhishak PR Sem 6Iron man SafariNo ratings yet
- Smart Helmet Accident Detection Project ProposalDocument14 pagesSmart Helmet Accident Detection Project ProposalREDDY ADITYA PAVAN KUMAR 203B1A0575No ratings yet
- Project Report FinalDocument53 pagesProject Report FinalngpgopiNo ratings yet
- Smart Helmet ABHIRAMDocument20 pagesSmart Helmet ABHIRAMHelloNo ratings yet
- RudraDocument17 pagesRudraHimadri ShuklaNo ratings yet
- Vehicle MainDocument89 pagesVehicle MainmgitecetechNo ratings yet
- Voice Control Robot ReportDocument30 pagesVoice Control Robot Reportsriku519No ratings yet
- Automatic Vehicle Detection Electromagnetic Intelligent Breaking System 2Document70 pagesAutomatic Vehicle Detection Electromagnetic Intelligent Breaking System 2kovurisaikiran319No ratings yet
- Fin Irjmets1656865202Document3 pagesFin Irjmets1656865202thandarwinNo ratings yet
- Speed Checker For Highways-Project ReportDocument41 pagesSpeed Checker For Highways-Project ReportSusheel KumarNo ratings yet
- Home Security System ProjectDocument28 pagesHome Security System ProjectRahulNo ratings yet
- Report HasnainDocument42 pagesReport HasnainHasnain AhammedNo ratings yet
- Beee Micro Project Line Follower - 5P4Document21 pagesBeee Micro Project Line Follower - 5P4farooqmd17032006No ratings yet
- Auto Speed Control of VehiclesDocument70 pagesAuto Speed Control of VehiclesAcu Healer Rasa KumarNo ratings yet
- Deepak ReportDocument26 pagesDeepak ReportDeepakNo ratings yet
- Speed Detect ProjectDocument15 pagesSpeed Detect ProjectatikpNo ratings yet
- Report2 032707Document33 pagesReport2 032707Rahul KmNo ratings yet
- Alcohol Sensing Alert With Engine Locking ProjectDocument48 pagesAlcohol Sensing Alert With Engine Locking Projecturjashah06No ratings yet
- Automatic Speed Control of Vehicles UsinDocument71 pagesAutomatic Speed Control of Vehicles Usinkalu chimdiNo ratings yet
- Helmet Detect ReportDocument29 pagesHelmet Detect ReportDeepak0% (1)
- Seminar ReportDocument25 pagesSeminar ReportNikhil BhureNo ratings yet
- Hall Effect Sensor Based Digital TachometerDocument31 pagesHall Effect Sensor Based Digital TachometerNirav ChauhanNo ratings yet
- Diploma Final Year ProjectDocument37 pagesDiploma Final Year ProjectRajratna SonkambleNo ratings yet
- Facemask Detection Using A I and IotDocument49 pagesFacemask Detection Using A I and IotRaZa UmarNo ratings yet
- Btech Final Year ProjectDocument47 pagesBtech Final Year ProjectRuchi SinghNo ratings yet
- Updated PCL ReportDocument13 pagesUpdated PCL ReportISTE JCENo ratings yet
- Traffic Signal Annunciator Alerts DriversDocument32 pagesTraffic Signal Annunciator Alerts DriversJayesh KolheNo ratings yet
- Arduino Car Parking SystemDocument36 pagesArduino Car Parking Systemakbar bashaNo ratings yet
- UG Major Project - Wireless Bomb Detection RobotDocument79 pagesUG Major Project - Wireless Bomb Detection RobotAditya75% (8)
- EE Major Project-II Final Report-1Document41 pagesEE Major Project-II Final Report-1rishikesh2001mishraNo ratings yet
- Iot Framework For Monitoring The Condition of The RoadsDocument54 pagesIot Framework For Monitoring The Condition of The RoadsKiran KumarNo ratings yet
- Automatic Garbage Intimator Final ReportDocument28 pagesAutomatic Garbage Intimator Final ReportPola AshutoshNo ratings yet
- Hassan ReportDocument40 pagesHassan Reportaamir mianNo ratings yet
- Automatic Table Cleaning RobotDocument39 pagesAutomatic Table Cleaning RobotKartheek BandiNo ratings yet
- Project Report 2Document25 pagesProject Report 2prabhat mittalNo ratings yet
- RFID Attendance SystemDocument8 pagesRFID Attendance Systemaryan.agarwal1586No ratings yet
- Obstacle Avoiding Robot CarDocument61 pagesObstacle Avoiding Robot Carhynas abrahamNo ratings yet
- Final Thesis PaperDocument66 pagesFinal Thesis PaperShoriful IslamNo ratings yet
- Automated Railway Announcement Using Zigbee ProtocolDocument18 pagesAutomated Railway Announcement Using Zigbee Protocolsree2728No ratings yet
- Rohan Rahalkar SeminarDocument22 pagesRohan Rahalkar SeminarRohan RahalkarNo ratings yet
- A Mini Project Report: Bachelor of TechnologyDocument23 pagesA Mini Project Report: Bachelor of TechnologyAkhilNo ratings yet
- Advanced Vehicle Security System With THDocument94 pagesAdvanced Vehicle Security System With THAdeyinka AdeolaNo ratings yet
- A Mini Project ReportDocument54 pagesA Mini Project ReportPosi NamdamNo ratings yet
- Comparative Study of Organic Solvents For Extraction of Copper From Ammoniacal Carbonate Solution Hu2010Document6 pagesComparative Study of Organic Solvents For Extraction of Copper From Ammoniacal Carbonate Solution Hu2010mtanaydinNo ratings yet
- Kyocera Fs-6900 Parts ManualDocument28 pagesKyocera Fs-6900 Parts ManualNic CowpeNo ratings yet
- Foreign Body Airway ObstructionDocument6 pagesForeign Body Airway ObstructionReeja RajeshNo ratings yet
- Communications in Algebra: On The U-Invariant of P-Adic Function FieldsDocument9 pagesCommunications in Algebra: On The U-Invariant of P-Adic Function FieldsKarim ZahidiNo ratings yet
- Popular CultureDocument25 pagesPopular CultureVibhuti KachhapNo ratings yet
- General Biology 1: Go Fast, or Slow Down?Document23 pagesGeneral Biology 1: Go Fast, or Slow Down?Mikhael OiraNo ratings yet
- BAlochistanDocument14 pagesBAlochistanzee100% (1)
- Cadence Monte Carlo Simulation TutorialDocument51 pagesCadence Monte Carlo Simulation Tutorialkuomatt100% (1)
- Proximity Sensing and Warning Technology For Heavy Construction Equipment OperationDocument10 pagesProximity Sensing and Warning Technology For Heavy Construction Equipment OperationAnand ReddyNo ratings yet
- HEAT EFFECTS (Cha 4) : Outline of Chapter OneDocument65 pagesHEAT EFFECTS (Cha 4) : Outline of Chapter OneAdam MekonnenNo ratings yet
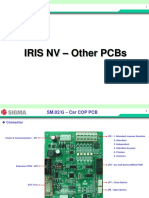
- 07 IRIS NV PCB OtherDocument15 pages07 IRIS NV PCB OtherArnaldo cordovaNo ratings yet
- Memorial Garden Policies and Guidelines St. Mark's Episcopal Church, Raleigh, North CarolinaDocument7 pagesMemorial Garden Policies and Guidelines St. Mark's Episcopal Church, Raleigh, North Carolinaestela maria dulaganNo ratings yet
- Management Foreign BodyDocument6 pagesManagement Foreign BodyRahmatia SyukrinaNo ratings yet
- 11 Physics Test Paper Ch3 1Document4 pages11 Physics Test Paper Ch3 1Devendar SharmaNo ratings yet
- Random Variate Generation-1Document21 pagesRandom Variate Generation-1Christian Delas AlasNo ratings yet
- Pneumatic Pruning Equipment American Arborist Supplies, Tree Care, Climbing EquipmentDocument1 pagePneumatic Pruning Equipment American Arborist Supplies, Tree Care, Climbing EquipmentSalman JoNo ratings yet
- Queer Ecology Critique - Georgetown 2014Document104 pagesQueer Ecology Critique - Georgetown 2014Evan JackNo ratings yet
- Fire and Blast in The Future OffshoreDocument45 pagesFire and Blast in The Future OffshoredrgNo ratings yet
- Shat Karma ConciseDocument4 pagesShat Karma ConcisesarikaabhayNo ratings yet
- 9701 w09 QP 41Document20 pages9701 w09 QP 41Hubbak KhanNo ratings yet
- Eutelsat 12 West A Satellite FootprintDocument2 pagesEutelsat 12 West A Satellite FootprintSkybrokersNo ratings yet
- Violet Flame Clearing of The Heart ServiceDocument16 pagesViolet Flame Clearing of The Heart ServiceMySecret Gardenmdp82% (11)
- ĐỀ SỐ 2Document98 pagesĐỀ SỐ 2van hoa nguyenNo ratings yet
- Welcome Students!: Week 8 (3 Quarter)Document28 pagesWelcome Students!: Week 8 (3 Quarter)Erika Lloren Luyun-GaliaNo ratings yet
- Shivag Itim Al ADocument27 pagesShivag Itim Al AKellie RamosNo ratings yet
- Tables and Bar ChartsDocument7 pagesTables and Bar ChartsVictoria FedoseevaNo ratings yet
- Cell Structure ActivityDocument4 pagesCell Structure ActivitysharksiedNo ratings yet