You might also like
- Beams and Framed Structures: Structures and Solid Body MechanicsFrom EverandBeams and Framed Structures: Structures and Solid Body MechanicsRating: 3 out of 5 stars3/5 (2)
- Module 4 - Shear - 2010Document24 pagesModule 4 - Shear - 2010Thomas John Doblas AgrabioNo ratings yet
- NIT-C Practice Set 1Document2 pagesNIT-C Practice Set 1Ashlin M.LNo ratings yet
- Chapter 7 PDFDocument32 pagesChapter 7 PDFAdolfo ElizondoNo ratings yet
- Ifea ND07Document3 pagesIfea ND07ss2791No ratings yet
- CHAPTER 8-SolutionsDocument28 pagesCHAPTER 8-Solutionsyunus emre kurtNo ratings yet
- f6cb57702022 Endsem MOSDocument2 pagesf6cb57702022 Endsem MOSshreyas shahNo ratings yet
- Timo ShinkoDocument13 pagesTimo ShinkoayantuNo ratings yet
- 001 0013 PDFDocument6 pages001 0013 PDFganeshNo ratings yet
- Krandall Chapter 8 - Solid Mechanics - 8.1-5Document27 pagesKrandall Chapter 8 - Solid Mechanics - 8.1-5huzef10No ratings yet
- AVMM Ch08Document13 pagesAVMM Ch08Alex BrandãoNo ratings yet
- Engineering Mechanics - 2020Document2 pagesEngineering Mechanics - 2020Shifranth VarmaNo ratings yet
- Lab 4 - Analysis of Deflection Under Transverse Loading (Cantilever Beam)Document10 pagesLab 4 - Analysis of Deflection Under Transverse Loading (Cantilever Beam)Taha KhanNo ratings yet
- Bending 1Document20 pagesBending 1Hossam SallamNo ratings yet
- Chapter III Torsion 3.1 3.2Document7 pagesChapter III Torsion 3.1 3.2Joshua John Julio100% (1)
- Shear Stresses in BeamsDocument14 pagesShear Stresses in Beamsabdullah bin masoodNo ratings yet
- Displacement of Beams: 8.1 Double Integration MethodDocument18 pagesDisplacement of Beams: 8.1 Double Integration MethodwinzNo ratings yet
- Analysis and Design For TorsionDocument22 pagesAnalysis and Design For TorsionNathan MolongwanaNo ratings yet
- Structural & Stress Analysis 3 09-10Document6 pagesStructural & Stress Analysis 3 09-10Isuru Udayanga NanayakkaraNo ratings yet
- Enclosed, Thin SectionsDocument4 pagesEnclosed, Thin Sectionsirinat101No ratings yet
- Determination of Beam Deflection by Using Double-Integration Method & Residual by RindDocument10 pagesDetermination of Beam Deflection by Using Double-Integration Method & Residual by RindAbdul HafeezNo ratings yet
- Nov - Dec 2020 X86202 (ST5204)Document4 pagesNov - Dec 2020 X86202 (ST5204)Karthik PandiNo ratings yet
- Applied MechanicsDocument38 pagesApplied MechanicsManish YadavNo ratings yet
- AVMM Ch08Document13 pagesAVMM Ch08Saeed RehmanNo ratings yet
- Q4Document15 pagesQ4dramiltNo ratings yet
- Filament Winding Part 1-Determination of The Wound Body Related Parameters-Koussios2004Document15 pagesFilament Winding Part 1-Determination of The Wound Body Related Parameters-Koussios2004Hiến Đinh VănNo ratings yet
- On Finite Deformations of Spatially Curved Bisymmetric Thin-Walled RodsDocument12 pagesOn Finite Deformations of Spatially Curved Bisymmetric Thin-Walled RodsGogyNo ratings yet
- R.C.C.DES: StrainsDocument6 pagesR.C.C.DES: StrainsTanmay MukherjeeNo ratings yet
- S2-3 Torsion-14Document16 pagesS2-3 Torsion-14abouelrich188No ratings yet
- Chapter 7Document34 pagesChapter 7HemantNo ratings yet
- (Lecture 13) Design of Post Tensioned Slabs-26-3-2019Document35 pages(Lecture 13) Design of Post Tensioned Slabs-26-3-2019mosha100% (2)
- Lab 4 - Analysis of Deflection Under Transverse Loading (Cantilever Beam)Document10 pagesLab 4 - Analysis of Deflection Under Transverse Loading (Cantilever Beam)Mohib ShareefNo ratings yet
- Timepass Acting PDFDocument13 pagesTimepass Acting PDFKiaraNo ratings yet
- Deflection of BeamsDocument3 pagesDeflection of BeamsAGEGTAMNo ratings yet
- Vibrations of Cantilever BeamsDocument9 pagesVibrations of Cantilever BeamsPeti KovácsNo ratings yet
- Compression Members in Rigid FramesDocument74 pagesCompression Members in Rigid Framesjuan jr lucenaNo ratings yet
- Chap03 A PDFDocument36 pagesChap03 A PDFdyah ykNo ratings yet
- Chap03 A PDFDocument36 pagesChap03 A PDFdyah ykNo ratings yet
- B.Sc. Eng. Honours Degree: Sri Lanka Institute of Information TechnologyDocument6 pagesB.Sc. Eng. Honours Degree: Sri Lanka Institute of Information TechnologyramNo ratings yet
- Advanced Theory of Vibrations ME-742 CH 08Document51 pagesAdvanced Theory of Vibrations ME-742 CH 08CADCAM 2K14No ratings yet
- Partial Interaction TheoryDocument11 pagesPartial Interaction TheoryJaleel ClaasenNo ratings yet
- Ch08 Structural Analysis EquationsDocument14 pagesCh08 Structural Analysis EquationsTegha LucasNo ratings yet
- WWW - Manaresults.Co - In: Engineering MechanicsDocument2 pagesWWW - Manaresults.Co - In: Engineering MechanicsNoor IslamNo ratings yet
- N - CH 08 ME-742 s19 Final PDFDocument75 pagesN - CH 08 ME-742 s19 Final PDFCADCAM 2K14No ratings yet
- Deflections of BeamDocument27 pagesDeflections of BeamIrene Margaretha Lumban RajaNo ratings yet
- 7.2 Short Columns Axially LoadedDocument28 pages7.2 Short Columns Axially Loadedqaxu xuxuNo ratings yet
- CE2351 SA II - by EasyEngineering - Net 1234Document11 pagesCE2351 SA II - by EasyEngineering - Net 1234SangeethaNo ratings yet
- Strength Report 1Document16 pagesStrength Report 1Syukri Mazlan 7BNo ratings yet
- (2008 Course) : S.E. (Mech.) (Ii Seni,) Examination, 2010 Strength of Machine ElementsDocument10 pages(2008 Course) : S.E. (Mech.) (Ii Seni,) Examination, 2010 Strength of Machine ElementsdramiltNo ratings yet
- Module1 - Set 2aDocument2 pagesModule1 - Set 2aindhubalab200413chNo ratings yet
- Torsion of Circular SectionsDocument10 pagesTorsion of Circular SectionsAbrham DubeNo ratings yet
- Unit-4 - Annaporna DasDocument22 pagesUnit-4 - Annaporna DasPRATIK AGARWALLNo ratings yet
- MDOF AnalysisDocument17 pagesMDOF AnalysisAditya Galih PrawiraNo ratings yet
- Review Module - Steel Design - Compression Members (ASD/LRFD)Document3 pagesReview Module - Steel Design - Compression Members (ASD/LRFD)Vergel SabanalNo ratings yet
- WWW - Manaresults.Co - In: Code: 13A01101 B.Tech I Year (R13) Regular & Supplementary Examinations May/June 2015Document3 pagesWWW - Manaresults.Co - In: Code: 13A01101 B.Tech I Year (R13) Regular & Supplementary Examinations May/June 2015Noor IslamNo ratings yet
- MENG 1010 Tutorial Assignments For 2020-21Document3 pagesMENG 1010 Tutorial Assignments For 2020-21Donnell FrancisNo ratings yet
- Cubic Shells: Eurographics/ ACM SIGGRAPH Symposium On Computer Animation (2007) D. Metaxas and J. Popovic (Editors)Document8 pagesCubic Shells: Eurographics/ ACM SIGGRAPH Symposium On Computer Animation (2007) D. Metaxas and J. Popovic (Editors)PauloAndresSepulvedaNo ratings yet
- Electron Beam-Specimen Interactions and Simulation Methods in MicroscopyFrom EverandElectron Beam-Specimen Interactions and Simulation Methods in MicroscopyNo ratings yet
- FST202 Chapter 6 TextureDocument40 pagesFST202 Chapter 6 TextureSyahirah FazialNo ratings yet
- Piled RaftDocument19 pagesPiled RaftAnonymous bVFHovNo ratings yet
- IJCE v11n4p217 enDocument9 pagesIJCE v11n4p217 enAlket DhamiNo ratings yet
- Lecture 3Document48 pagesLecture 3Tanu BoltaNo ratings yet
- Evaluation of Seismic Performance of RC Frame Structures by Pushover and Time History Analyses - Part-7Document15 pagesEvaluation of Seismic Performance of RC Frame Structures by Pushover and Time History Analyses - Part-7Adam Michael GreenNo ratings yet
- Stress PDFDocument13 pagesStress PDF9966197483No ratings yet
- Chapt 06Document14 pagesChapt 06Jesse McClure100% (3)
- l05 092Document7 pagesl05 092rammirisNo ratings yet
- Chapter 5 FaultsDocument9 pagesChapter 5 FaultsRahil ShaikNo ratings yet
- Tree Guard (As Per Client Specs)Document14 pagesTree Guard (As Per Client Specs)Ankur BarsainyaNo ratings yet
- Earthquake Risk Assessment-2Document23 pagesEarthquake Risk Assessment-2Katherine Cunanan DizonNo ratings yet
- Expansive Soil PaperDocument32 pagesExpansive Soil PaperAnonymous ELujOV3No ratings yet
- An Introduction To Seismic Isolation, R. Ivan Skinnerl, William H. Robinson, and Graeme H. McVerryDocument190 pagesAn Introduction To Seismic Isolation, R. Ivan Skinnerl, William H. Robinson, and Graeme H. McVerryEnrique Simbort Zeballos80% (5)
- Shearing Resistance of Steel Fiber Reinforced Self Consolidating Concrete Beams Without StirrupsDocument8 pagesShearing Resistance of Steel Fiber Reinforced Self Consolidating Concrete Beams Without StirrupsSheik MohamedNo ratings yet
- Compressive Strength and Behaviour of Gusset PlateDocument19 pagesCompressive Strength and Behaviour of Gusset PlateRavindraKhandelwalNo ratings yet
- Diseño SudafricanoDocument34 pagesDiseño SudafricanoTomás Venegas PardoNo ratings yet
- Yield Curvature For Seismic Design of Circular Reinforced Concrete Columns PDFDocument9 pagesYield Curvature For Seismic Design of Circular Reinforced Concrete Columns PDFMohammad AshrafyNo ratings yet
- Earthquake Location: The Basic PrinciplesDocument40 pagesEarthquake Location: The Basic PrinciplesMohit JhalaniNo ratings yet
- Design of Curtain WallDocument2 pagesDesign of Curtain WallRaju Saini100% (1)
- Monotonic and Cyclic Loading Models For Panel Zones in Steel Moment FramesDocument31 pagesMonotonic and Cyclic Loading Models For Panel Zones in Steel Moment FramesMarimuthu KaliyamoorthyNo ratings yet
- New Design Criteria For Gusset Plates in TensionDocument18 pagesNew Design Criteria For Gusset Plates in TensiongullipalliNo ratings yet
- How Eurocode 7 Has Affected Geotechnical Design Trevor OrrDocument14 pagesHow Eurocode 7 Has Affected Geotechnical Design Trevor OrrshrekerNo ratings yet
- SOFA (Solution For Fastening) : Annex C: Design Methods For AnchoragesDocument39 pagesSOFA (Solution For Fastening) : Annex C: Design Methods For Anchoragesajra_bg0% (1)
- Ap T188 11Document82 pagesAp T188 11adjiNo ratings yet
- VortexWell NEL Test Report E1937X12 Dec 2012Document34 pagesVortexWell NEL Test Report E1937X12 Dec 2012Alberto PuyalNo ratings yet
- Fema 450 2 Commentary Part 2Document110 pagesFema 450 2 Commentary Part 2Tariq AbdulsalamNo ratings yet
- Assessment of Failure Along Re-Entrant Corner Cracks in Existing RC Dapped-End ConnectionsDocument12 pagesAssessment of Failure Along Re-Entrant Corner Cracks in Existing RC Dapped-End Connections会爆炸的小米NoteNo ratings yet
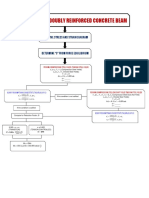
- Analysis of Doubly Reinforced Concrete Beam: Draw The Stress and Strain DiagramDocument1 pageAnalysis of Doubly Reinforced Concrete Beam: Draw The Stress and Strain DiagramPrincess Joy Villareal EncinasNo ratings yet
- Caraga Earthquake HistoryDocument6 pagesCaraga Earthquake HistoryGelbert SilotNo ratings yet
- Lesson Plan CPE601Document5 pagesLesson Plan CPE601MOHD IZWAN FARHAN MUHAMED NIZAMNo ratings yet