You might also like
- Lisa18 Slides MastersDocument127 pagesLisa18 Slides Mastersadrien.blanchetNo ratings yet
- Windows Kernel OverviewDocument14 pagesWindows Kernel Overviewabhi.badam186No ratings yet
- OsII NotesDocument124 pagesOsII NotesAmaonwu OnyebuchiNo ratings yet
- 1.interprocess Communication Mechanisms 2.memory Management and Virtual MemoryDocument45 pages1.interprocess Communication Mechanisms 2.memory Management and Virtual MemorySri VardhanNo ratings yet
- AOS2Document12 pagesAOS2Iqra WaheedNo ratings yet
- Threads: Concurrent ProgrammingDocument13 pagesThreads: Concurrent ProgrammingCrystal ClearNo ratings yet
- Windows Kernel Internal OverviewDocument21 pagesWindows Kernel Internal OverviewAdarshNo ratings yet
- Organisasi Sistem Komputer: Bahrin Dahlan., S.Kom.,MtDocument19 pagesOrganisasi Sistem Komputer: Bahrin Dahlan., S.Kom.,MtwilyantoNo ratings yet
- Embedded Systems:: G P Computer SystemDocument21 pagesEmbedded Systems:: G P Computer SystemMonu ChouhanNo ratings yet
- Lecture-1 ARM Cortex M4-Based System PDFDocument36 pagesLecture-1 ARM Cortex M4-Based System PDFAnandNo ratings yet
- Mac OS X - DESIGN PRINCIPLES AND KERNEL MODULESDocument16 pagesMac OS X - DESIGN PRINCIPLES AND KERNEL MODULESapi-3700456No ratings yet
- CS 333 Introduction To Operating Systems Class 2 - OS-Related Hardware & Software The Process ConceptDocument47 pagesCS 333 Introduction To Operating Systems Class 2 - OS-Related Hardware & Software The Process ConceptFelix EnyinnayaNo ratings yet
- Firmware Unit IVDocument42 pagesFirmware Unit IVRaviNo ratings yet
- Day 1 Agenda: Intro to OS and Linux CommandsDocument46 pagesDay 1 Agenda: Intro to OS and Linux CommandsVedang PatidarNo ratings yet
- Linux Internals & Networking: System Programming Using Kernel InterfacesDocument305 pagesLinux Internals & Networking: System Programming Using Kernel InterfacesSiddharth SidhuNo ratings yet
- POSIX Threads ProgrammingDocument15 pagesPOSIX Threads ProgrammingMaria Luisa Nuñez MendozaNo ratings yet
- Sdr-Infocom Brazil 2009 v1-1Document64 pagesSdr-Infocom Brazil 2009 v1-1Nha BanNo ratings yet
- Operating Systems: ThreadsDocument32 pagesOperating Systems: ThreadsAuroraNo ratings yet
- Understanding Computers - Understanding Programming Languages - Understanding JavaDocument30 pagesUnderstanding Computers - Understanding Programming Languages - Understanding JavaMuhammad Shakirin ShaariNo ratings yet
- Glossary+of+terms IBCSDocument13 pagesGlossary+of+terms IBCSEros Munoz JimenezNo ratings yet
- Concept of Real Time OSDocument29 pagesConcept of Real Time OSVignesh waranNo ratings yet
- Process: An Instance of a Program in ExecutionDocument37 pagesProcess: An Instance of a Program in ExecutionIn SaneNo ratings yet
- RTOS ConceptsDocument29 pagesRTOS Conceptsshirish jadhav91% (11)
- Windows Kernel Internals: David B. Probert, Ph.D. Windows Kernel Development Microsoft CorporationDocument20 pagesWindows Kernel Internals: David B. Probert, Ph.D. Windows Kernel Development Microsoft CorporationshamagondalNo ratings yet
- 2 - Win Concepts Tools PDFDocument45 pages2 - Win Concepts Tools PDFShidhinlal c.kNo ratings yet
- Genertions of OSDocument31 pagesGenertions of OSSamavia RiazNo ratings yet
- Organisasi Komputer Kuliah Pendahuluan IKI20210Document22 pagesOrganisasi Komputer Kuliah Pendahuluan IKI20210Tita MayasariNo ratings yet
- 03 Threads SynchDocument144 pages03 Threads SynchHikmet HasanovNo ratings yet
- Distributed SystemsDocument238 pagesDistributed SystemsOTMANE ER-RAGRAGUINo ratings yet
- Lecture 3- ThreadsDocument28 pagesLecture 3- Threadsfiraol.buloNo ratings yet
- Lec17 DisksDocument31 pagesLec17 Disksapi-3761983No ratings yet
- Coffee ProjectDocument50 pagesCoffee ProjectMahmoud DaghbasNo ratings yet
- Windows Kernel OverviewDocument20 pagesWindows Kernel OverviewJeff Pratt100% (1)
- Microprocessor Based System: My Lord! Advance Me in Knowledge and True UnderstandingDocument15 pagesMicroprocessor Based System: My Lord! Advance Me in Knowledge and True UnderstandingAsma' ZubirNo ratings yet
- 2020.04.30 - Design of UNIX - LectureDocument29 pages2020.04.30 - Design of UNIX - LectureKristijan GrozdanoskiNo ratings yet
- Chương 01Document31 pagesChương 01Bách NguyễnNo ratings yet
- Lecture 3 Classification of Embedded SystemsDocument22 pagesLecture 3 Classification of Embedded SystemsSaikrishnaNo ratings yet
- Operating Systems and Computer Architecture ExplainedDocument35 pagesOperating Systems and Computer Architecture Explainedalex bascoNo ratings yet
- Ee249 13 RtosDocument211 pagesEe249 13 RtosDinh Duy LeNo ratings yet
- Drawbridge PDFDocument28 pagesDrawbridge PDFAlok H TripathiNo ratings yet
- William Stallings Computer Organization and Architecture 9 EditionDocument28 pagesWilliam Stallings Computer Organization and Architecture 9 EditionAnggi Riza Amirullah SidhartaNo ratings yet
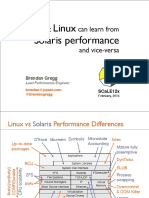
- SCaLE Linux Vs Solaris Performance2014 PDFDocument115 pagesSCaLE Linux Vs Solaris Performance2014 PDFs3m3staNo ratings yet
- 04 Computers Knowledge-OrganiserDocument5 pages04 Computers Knowledge-OrganiserNavdha SachdevaNo ratings yet
- Glossary: My Revisions Notes: WJEC and Eduqas GCSE Computer ScienceDocument2 pagesGlossary: My Revisions Notes: WJEC and Eduqas GCSE Computer ScienceSithika KariawasamNo ratings yet
- Understanding Kernel and OS ArchitectureDocument16 pagesUnderstanding Kernel and OS ArchitecturehameresterNo ratings yet
- High Performance Networking. Low Latency Devices. 'Network Fabric'Document40 pagesHigh Performance Networking. Low Latency Devices. 'Network Fabric'Jason WongNo ratings yet
- Windows Kernel Internals II: University of Tokyo - July 2004Document16 pagesWindows Kernel Internals II: University of Tokyo - July 2004Randall Jordan MoreiraNo ratings yet
- IKI20210 Pengantar Organisasi Komputer Kuliah No. 1: PendahuluanDocument22 pagesIKI20210 Pengantar Organisasi Komputer Kuliah No. 1: PendahuluansubairiNo ratings yet
- 05 Week6 8 Software Security A CompressedDocument66 pages05 Week6 8 Software Security A CompressedOscar WongNo ratings yet
- Operating 12system OriDocument102 pagesOperating 12system Oriapi-3716254No ratings yet
- Operating Systems Lecture Notes: Matthew DaileyDocument31 pagesOperating Systems Lecture Notes: Matthew DaileyMegha HegdeNo ratings yet
- 8.1.1 Multiprocessors Hardware 8.1.2 Multiprocessors Operation System Types 8.1.3 Multiprocessors Synchronization 8.1.4 Multiprocessors SchedulingDocument49 pages8.1.1 Multiprocessors Hardware 8.1.2 Multiprocessors Operation System Types 8.1.3 Multiprocessors Synchronization 8.1.4 Multiprocessors SchedulingHoàng VõNo ratings yet
- OS NotesDocument38 pagesOS NotesPranav Shady AshishNo ratings yet
- Embedded System Module 3 Part 2Document60 pagesEmbedded System Module 3 Part 2Harish G CNo ratings yet
- Unit-5 Part1Document85 pagesUnit-5 Part1himateja mygopulaNo ratings yet
- 15-740/18-740 Computer Architecture Lecture 3: Performance: Carnegie Mellon UniversityDocument20 pages15-740/18-740 Computer Architecture Lecture 3: Performance: Carnegie Mellon UniversityHariNo ratings yet
- Chapter 1: Introduction and HistoryDocument21 pagesChapter 1: Introduction and HistoryBirhanu AberaNo ratings yet
- "Unleashing the Power of Assembly Language: Mastering the World's Most Efficient Code"From Everand"Unleashing the Power of Assembly Language: Mastering the World's Most Efficient Code"No ratings yet
- Akash Kukadiya Graduate Report Fall2012Document70 pagesAkash Kukadiya Graduate Report Fall2012Ly TrầnNo ratings yet
- Extra High Voltage AcDocument535 pagesExtra High Voltage AcRachid HamianiNo ratings yet
- Fpga Implimentation of LCD Display1Document77 pagesFpga Implimentation of LCD Display1praveen_banthiNo ratings yet
- Murthy-Pavan Kumar-thesis-2019-Hardware Acceleration of Edge Detection Using HLSDocument56 pagesMurthy-Pavan Kumar-thesis-2019-Hardware Acceleration of Edge Detection Using HLSLy TrầnNo ratings yet
- Bachelor's Thesis Diploma 2019: Fracheboud LoïcDocument88 pagesBachelor's Thesis Diploma 2019: Fracheboud LoïcLy TrầnNo ratings yet
- PS2 Keyboard: About The GuideDocument3 pagesPS2 Keyboard: About The GuideLeslie WrightNo ratings yet
- Bachelor's Thesis Diploma 2019: Fracheboud LoïcDocument88 pagesBachelor's Thesis Diploma 2019: Fracheboud LoïcLy TrầnNo ratings yet
- Synthesizing and Simulating Verilog Code: Using Xilinx SoftwareDocument17 pagesSynthesizing and Simulating Verilog Code: Using Xilinx SoftwareJohn Victor BalamNo ratings yet
- Lab: Implementing The Xilkernel On The Xilinx Spartan 3E Starter KitDocument26 pagesLab: Implementing The Xilkernel On The Xilinx Spartan 3E Starter Kittcth_amyNo ratings yet
- Platform Studio UgDocument228 pagesPlatform Studio UgLy TrầnNo ratings yet
- Best Practice.Document37 pagesBest Practice.Navaneeth KumarNo ratings yet
- Workshop On Syntax - CECARDocument3 pagesWorkshop On Syntax - CECARWALTER100% (1)
- Teen Explorer 7, Kartkęwki A, Grupa 2 (Przeciągnięte) (Przeciągnięte)Document4 pagesTeen Explorer 7, Kartkęwki A, Grupa 2 (Przeciągnięte) (Przeciągnięte)Sandro FosachecaNo ratings yet
- Millennium: R134A Refrigerant Cooling Capacities 336 KW To 1090 KWDocument26 pagesMillennium: R134A Refrigerant Cooling Capacities 336 KW To 1090 KWttt449No ratings yet
- Gomez 1998 - Infancia y AprendizajeDocument30 pagesGomez 1998 - Infancia y Aprendizajesebe16No ratings yet
- Analyzing Shakespeare's "The Seven Ages of ManDocument6 pagesAnalyzing Shakespeare's "The Seven Ages of ManEstelle Nica Marie DunlaoNo ratings yet
- REVISED BLOOMS TAXONOMY-ppt-ADZ-050309Document48 pagesREVISED BLOOMS TAXONOMY-ppt-ADZ-050309Juhainie Candatu Anas100% (2)
- CRNQ, CRND - Instruction Manual (Detailed Explanations) BFP-A8661-AE (02.15) PDFDocument544 pagesCRNQ, CRND - Instruction Manual (Detailed Explanations) BFP-A8661-AE (02.15) PDFpauloNo ratings yet
- Broad and Narrow Abilities List HandoutDocument11 pagesBroad and Narrow Abilities List HandoutGlade EggettNo ratings yet
- MGMT 540 2019 February - A Cross Cultural Crash and Labor Conflict - Sai Nong Restaurant (A)Document8 pagesMGMT 540 2019 February - A Cross Cultural Crash and Labor Conflict - Sai Nong Restaurant (A)Komal KapilNo ratings yet
- Lecture 21 - MTH101 IIT KanpurDocument3 pagesLecture 21 - MTH101 IIT KanpurAsish MahapatraNo ratings yet
- Teaching Language SkillsDocument5 pagesTeaching Language SkillsRocioNo ratings yet
- Games World of Puzzles April 2017Document84 pagesGames World of Puzzles April 2017mina_ql100% (1)
- Many Tongues Called EnglishDocument6 pagesMany Tongues Called EnglishIrene PierriNo ratings yet
- Lecture#6 Complex NumbersDocument11 pagesLecture#6 Complex NumbersburhanNo ratings yet
- ChildBook Mother Is Gold Father Is Glass Gender An - Lorelle D Semley PDFDocument257 pagesChildBook Mother Is Gold Father Is Glass Gender An - Lorelle D Semley PDFTristan Pan100% (1)
- IMSLP65816-PMLP10093-Bach-JS Ach Bleib Bei Uns BWV649 PDFDocument3 pagesIMSLP65816-PMLP10093-Bach-JS Ach Bleib Bei Uns BWV649 PDFMichael PNo ratings yet
- SPEECH AND THEATER Communication UniversalsDocument3 pagesSPEECH AND THEATER Communication UniversalsMa'am Roma GualbertoNo ratings yet
- Tu Fu's Jade Flower Palace poem analysis and translationDocument6 pagesTu Fu's Jade Flower Palace poem analysis and translationzeusdavid100% (1)
- Salesforce AdminDocument3 pagesSalesforce Adminsss sss0% (1)
- Contoh Soal BHS INGGRIS Kelas 7Document2 pagesContoh Soal BHS INGGRIS Kelas 7Putu Chintya DeviNo ratings yet
- MVC TutorialDocument166 pagesMVC Tutorialmanish srivastavaNo ratings yet
- Gambaran Sindrom Afasia Kronik Dan Perubahannya Pasca TerapiDocument9 pagesGambaran Sindrom Afasia Kronik Dan Perubahannya Pasca TerapiNabila SalsabillNo ratings yet
- PRC150Document118 pagesPRC150Antonio RodriguezNo ratings yet
- Adjectives + Prepositions: About / at / of / WithDocument3 pagesAdjectives + Prepositions: About / at / of / Withayb alhoceima100% (1)
- Python programming paper: computer science honours semester 1Document6 pagesPython programming paper: computer science honours semester 1trivesh kambojNo ratings yet
- HarikambhojiDocument8 pagesHarikambhojiDasika SunderNo ratings yet
- Guide To WebexDocument6 pagesGuide To WebexAdnin NaimNo ratings yet
- Network Management PDFDocument37 pagesNetwork Management PDFPhuoc NgocNo ratings yet
- Task 2 - My Hidden TalentDocument15 pagesTask 2 - My Hidden Talentvanesapereira825No ratings yet