You might also like
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1From EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1Rating: 2.5 out of 5 stars2.5/5 (3)
- Line Follower Robot Using LabVIEWDocument6 pagesLine Follower Robot Using LabVIEWTrần Huy Vinh QuangNo ratings yet
- DC Motor ArduinoDocument40 pagesDC Motor ArduinoBodo De La BuernoNo ratings yet
- DTMF Based Prepaid Energy MeterDocument69 pagesDTMF Based Prepaid Energy MeterHemant Patel0% (1)
- 345028505-Peralatan-Otomasi-Industri (Autosaved)Document105 pages345028505-Peralatan-Otomasi-Industri (Autosaved)16 I Gde Wisnu Kusuma wardanaNo ratings yet
- Arduino - Servo MotorDocument3 pagesArduino - Servo Motorꀸꃅꋪꀎᐯ KumarNo ratings yet
- Adv - Micro. DC Motor Control With L293D Motor Driver IC and ArduinoDocument25 pagesAdv - Micro. DC Motor Control With L293D Motor Driver IC and Arduinowillingcoder.billionaireNo ratings yet
- Hardware InterfacingDocument65 pagesHardware Interfacingrajan palaNo ratings yet
- Arduino UnoDocument11 pagesArduino UnoNirav DsouzaNo ratings yet
- 3.1 Block Diagram & Components Description:: Fig: 3.1 Block Diagram of Cyclo-Converter Using MicrocontrollerDocument10 pages3.1 Block Diagram & Components Description:: Fig: 3.1 Block Diagram of Cyclo-Converter Using MicrocontrollerSwamyNo ratings yet
- Ir Remote Based Stepper Motor Control PDFDocument70 pagesIr Remote Based Stepper Motor Control PDFsanoopmk100% (1)
- Chapter One Controlling The Operation of Wind-Solar Hybrid Power System Using Arduino-Based Hybrid MPPT ControllerDocument48 pagesChapter One Controlling The Operation of Wind-Solar Hybrid Power System Using Arduino-Based Hybrid MPPT ControllerOdebunmi NathanielNo ratings yet
- TheftDocument12 pagesTheftEmeka Nelson OffornedoNo ratings yet
- Bomb Disposal Robot Using RF: Block DiagrmDocument10 pagesBomb Disposal Robot Using RF: Block DiagrmabhiudeyvijNo ratings yet
- Prime Mover Synchronous Generator Electrical GridDocument12 pagesPrime Mover Synchronous Generator Electrical GridReymart ManablugNo ratings yet
- Line Follower ROBOT Micro Controller 8051Document28 pagesLine Follower ROBOT Micro Controller 8051Rohit XavierNo ratings yet
- PTC1Document5 pagesPTC1jay shahNo ratings yet
- Il 41 100 1BDocument20 pagesIl 41 100 1Brajat_nandy5297No ratings yet
- DC Motor Fyp EdittdDocument20 pagesDC Motor Fyp EdittdRabia BilalNo ratings yet
- Welcome To International Journal of Engineering Research and Development (IJERD)Document8 pagesWelcome To International Journal of Engineering Research and Development (IJERD)IJERDNo ratings yet
- Embedded SystemDocument300 pagesEmbedded Systemsumathi100% (2)
- PDD LabDocument29 pagesPDD LabHariNarayanNo ratings yet
- Motor & Thermistor FundaDocument10 pagesMotor & Thermistor Fundajay shahNo ratings yet
- Lab Project ReportDocument11 pagesLab Project ReportMe alag HuNo ratings yet
- Biomedical Monitoring SystemDocument81 pagesBiomedical Monitoring SystemAmna AamirNo ratings yet
- Robotic ArmDocument106 pagesRobotic ArmGourav SinglaNo ratings yet
- Generator BasicsDocument8 pagesGenerator BasicsRajashekarBheemaNo ratings yet
- Automotive Electrical SystemDocument55 pagesAutomotive Electrical SystemMoriel J. NudoNo ratings yet
- 1 - DC Micro Motors & Geared MotorsDocument13 pages1 - DC Micro Motors & Geared Motorsfusti_88No ratings yet
- Iot Power Measurement Module: Presented byDocument18 pagesIot Power Measurement Module: Presented byAws FaeqNo ratings yet
- Controlling DC Motors With The L298N Dual HDocument27 pagesControlling DC Motors With The L298N Dual Hchafic WEISSNo ratings yet
- Experiment 12 The Universal Motor ObjectiveDocument5 pagesExperiment 12 The Universal Motor ObjectiveFahad IbrarNo ratings yet
- Essentials of Motors and Motor Driver: Interfacing Proximity Sensor With MotorDocument28 pagesEssentials of Motors and Motor Driver: Interfacing Proximity Sensor With MotorAli KhormiNo ratings yet
- Lab 3Document6 pagesLab 3Vu LeNo ratings yet
- GeneratorDocument62 pagesGeneratorBalachakri KothuriNo ratings yet
- Injection and Ignition SystemsDocument18 pagesInjection and Ignition Systems4gen_7No ratings yet
- Synchro Transmitter and Receiver 14pDocument14 pagesSynchro Transmitter and Receiver 14prixa11663No ratings yet
- Curso Drivers AC SiemensDocument37 pagesCurso Drivers AC SiemensCarlos G. DuqueNo ratings yet
- 16x2 LCD Relay1 Bluetooth: Arduino Based Underground Cable Fault DetectorDocument58 pages16x2 LCD Relay1 Bluetooth: Arduino Based Underground Cable Fault DetectorAnjali NaiduNo ratings yet
- Module IiDocument14 pagesModule Iisarath.mNo ratings yet
- Sensors & ActuatorsDocument67 pagesSensors & Actuatorsmahendra naik100% (2)
- Pure Sine Wave Inverter Circuit Using ArduinoDocument17 pagesPure Sine Wave Inverter Circuit Using ArduinoEmmanuel Gospel RajNo ratings yet
- Napino FileDocument29 pagesNapino FileParveen JaatNo ratings yet
- Brake Load Test of Squirel Cage Induction Motor 3 PhaseDocument7 pagesBrake Load Test of Squirel Cage Induction Motor 3 Phasejassisc100% (1)
- MEO Orals On Marine Electro Technology Function 5Document2 pagesMEO Orals On Marine Electro Technology Function 5Salih Tuğrul SarıNo ratings yet
- ICL7107 Assembly GuideDocument9 pagesICL7107 Assembly GuideLaurentiu IacobNo ratings yet
- Answer: Control System (Unit 1)Document18 pagesAnswer: Control System (Unit 1)Ajeet Kumar shuklaNo ratings yet
- Arduino Workshop 03 - Output: ActuatorsDocument13 pagesArduino Workshop 03 - Output: ActuatorsDardan BelaNo ratings yet
- Induction Motor ProtectionDocument42 pagesInduction Motor Protectionjayonline_4u91% (11)
- Automotive Electrical & Electronics Unit II: Presented byDocument58 pagesAutomotive Electrical & Electronics Unit II: Presented bymharitms100% (1)
- Automotive Electrical & Electronics Unit II: Presented byDocument58 pagesAutomotive Electrical & Electronics Unit II: Presented bymharitmsNo ratings yet
- Automotive Electrical & Electronics Unit II: Presented byDocument58 pagesAutomotive Electrical & Electronics Unit II: Presented bymharitmsNo ratings yet
- Microcontroll Er Based Car Parking SystemDocument46 pagesMicrocontroll Er Based Car Parking SystemEr Amit BhattNo ratings yet
- Electric Motor IT ReportDocument9 pagesElectric Motor IT ReportVincentNo ratings yet
- Generator & Exciter Basics: Whitby Hydro Energy Services Corporation: Engineering & Construction ServicesDocument8 pagesGenerator & Exciter Basics: Whitby Hydro Energy Services Corporation: Engineering & Construction Services12343567890No ratings yet
- Unit 2-3Document38 pagesUnit 2-3vidhya sNo ratings yet
- Electric Motor & Thermistor FundaDocument5 pagesElectric Motor & Thermistor Fundajay shahNo ratings yet
- TachometerDocument36 pagesTachometerSheena Mary100% (1)
- ELECTRICAL Engineering Interview Questions With Answers Free Download - EEEDocument33 pagesELECTRICAL Engineering Interview Questions With Answers Free Download - EEEearhyathNo ratings yet
- Injection and Ignition Systems: User's Guide For DT-C002Document16 pagesInjection and Ignition Systems: User's Guide For DT-C002arupNo ratings yet
- Stepper Motor Speed Control 1Document8 pagesStepper Motor Speed Control 1Mahesh kumarNo ratings yet
- MEMS Multisensor Intelligent Damage Detection For Wind TurbinesDocument8 pagesMEMS Multisensor Intelligent Damage Detection For Wind TurbinesMahesh kumarNo ratings yet
- Eb Power Failure AlarmDocument5 pagesEb Power Failure AlarmMahesh kumar0% (1)
- Ieee Parer CatlogDocument19 pagesIeee Parer CatlogMahesh kumarNo ratings yet
- Ieee Parer CatlogDocument19 pagesIeee Parer CatlogMahesh kumarNo ratings yet
- Chapter - 1Document56 pagesChapter - 1Mahesh kumarNo ratings yet
- D.C GunDocument15 pagesD.C GunMahesh kumarNo ratings yet
- Coolant PumpDocument11 pagesCoolant PumpMahesh kumarNo ratings yet
- Coolant PumpDocument11 pagesCoolant PumpMahesh kumarNo ratings yet
- FINAL52SDMS01Rev 0ver0301Document25 pagesFINAL52SDMS01Rev 0ver0301mahamazon88No ratings yet
- GH1248, GH1250, GH1253 Preliminary Datasheet V3.0 2Document8 pagesGH1248, GH1250, GH1253 Preliminary Datasheet V3.0 2NEXTECH ElectroicsNo ratings yet
- Automatic Room Light ControllerDocument17 pagesAutomatic Room Light ControllerManjushree J100% (6)
- Hiper Family Datasheet-14271Document27 pagesHiper Family Datasheet-14271nguyenthaibinh13No ratings yet
- Single Aisle Technical Training Manual T1+T2 (CFM 56) (LVL 2&3)Document40 pagesSingle Aisle Technical Training Manual T1+T2 (CFM 56) (LVL 2&3)Ahmad ZakwanNo ratings yet
- BCP3 R1Document4 pagesBCP3 R1Fulton Xavier ZambranoNo ratings yet
- MBQ60T65PESTHDocument8 pagesMBQ60T65PESTHJuan Sebastian Arenas100% (1)
- LVC Pricelist Wef 1st July 2014Document104 pagesLVC Pricelist Wef 1st July 2014manoj031No ratings yet
- 3VA27801AC130AA0-Z+A07 2bT30 Datasheet enDocument4 pages3VA27801AC130AA0-Z+A07 2bT30 Datasheet enJulio HauptNo ratings yet
- Safety (IEC) Report ZK-D3180S ZK-D2180S ZK-D1065SDocument72 pagesSafety (IEC) Report ZK-D3180S ZK-D2180S ZK-D1065SOscar Danilo Erazo Pecillo100% (1)
- APC CS 500 Manual PDFDocument2 pagesAPC CS 500 Manual PDFOlmar ElhondNo ratings yet
- Battery Charger PDFDocument27 pagesBattery Charger PDFVarada Radjou CNo ratings yet
- Power Electronics (By Ned Mohan) 2Document127 pagesPower Electronics (By Ned Mohan) 2Мирослав Милков100% (1)
- Basic Substation LectureDocument60 pagesBasic Substation LectureBer Salazar Jr67% (3)
- Training Report On 132/33 KV Sub-StationDocument25 pagesTraining Report On 132/33 KV Sub-StationAbrar Ahmad77% (47)
- VCB Manual ENG Ver.05 Dated 01.03.07Document81 pagesVCB Manual ENG Ver.05 Dated 01.03.07mn090078dNo ratings yet
- Mitsubishi A800 ManualDocument714 pagesMitsubishi A800 ManualAlejandro Garcia0% (1)
- Panimalar Engineering College: Answer ALL Questions, Choose The Best Answer Part - A (30 X 1 30)Document6 pagesPanimalar Engineering College: Answer ALL Questions, Choose The Best Answer Part - A (30 X 1 30)sivaNo ratings yet
- Relay 30A 24V SonChuaDocument11 pagesRelay 30A 24V SonChuamylitalindaNo ratings yet
- Stick Diagram & Lambda Based Design RulesDocument21 pagesStick Diagram & Lambda Based Design Rulesbaraniinst6875100% (1)
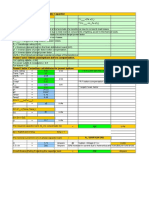
- Power Factor Correction SpreadsheetDocument1 pagePower Factor Correction Spreadsheetirwanchandra50% (2)
- ABB Produktubersicht Federspeicherantrieb FSA 1Document18 pagesABB Produktubersicht Federspeicherantrieb FSA 1Razvan PislaruNo ratings yet
- Lightning Arrestors Part 1Document18 pagesLightning Arrestors Part 1srinimeha@gmail.comNo ratings yet
- Lecture 1 - Construction of Synchronous GeneratorDocument11 pagesLecture 1 - Construction of Synchronous GeneratorNdapewelao MbwaleNo ratings yet
- What Is Unijunction Transistor (UJT)Document6 pagesWhat Is Unijunction Transistor (UJT)khan yousafzaiNo ratings yet
- Houchin Price List 2021 Rev GDocument6 pagesHouchin Price List 2021 Rev GWahyu KhoeruttamamNo ratings yet
- RM4TR32 Schneider Electric Datasheet 10978291Document7 pagesRM4TR32 Schneider Electric Datasheet 10978291carlosvillamar1234No ratings yet
- Types of Neutral Earthing in Power DistributionDocument8 pagesTypes of Neutral Earthing in Power DistributionedwardoNo ratings yet
- List of SOPDocument14 pagesList of SOPDimas PratamaNo ratings yet