You might also like
- Geological Strain Analysis: A Manual for the Rf/Ø MethodFrom EverandGeological Strain Analysis: A Manual for the Rf/Ø MethodRating: 4 out of 5 stars4/5 (1)
- MDynamics Chap5Document13 pagesMDynamics Chap5卓宥瑞No ratings yet
- SdijspvbieDocument13 pagesSdijspvbie卓宥瑞No ratings yet
- 4-Problems-Balancing-Rotating MassesDocument5 pages4-Problems-Balancing-Rotating MassesvrushNo ratings yet
- 10 Chapter 12 Balancing-StudentDocument82 pages10 Chapter 12 Balancing-StudentpayingintanNo ratings yet
- ME 3507: Theory of Machines: BalancingDocument60 pagesME 3507: Theory of Machines: Balancingusama riazNo ratings yet
- Balancing Rigid RotorsDocument17 pagesBalancing Rigid Rotorsdinesh veerNo ratings yet
- Chapter 3-BalancingDocument29 pagesChapter 3-BalancingDanielRaoNo ratings yet
- Chapter 3-BalancingDocument30 pagesChapter 3-BalancingHafzal GaniNo ratings yet
- BALANCINGDocument72 pagesBALANCINGSerhat YıldırımNo ratings yet
- Lect BalancingDocument72 pagesLect BalancingTalha KhanzadaNo ratings yet
- Engineering MechanicsDocument5 pagesEngineering MechanicsZaid BaigNo ratings yet
- Circular and Curvilinear MotionsDocument26 pagesCircular and Curvilinear MotionsJimmy LauNo ratings yet
- Analysis of Statically Indeterminate Structures: EiabcDocument6 pagesAnalysis of Statically Indeterminate Structures: EiabcMekuannint DemekeNo ratings yet
- Experiment 2Document6 pagesExperiment 2Syira Sofyan100% (1)
- 06 Hillerborg Strip MethodDocument7 pages06 Hillerborg Strip MethodZeshan SabirNo ratings yet
- 2019-ME-127Document48 pages2019-ME-127Zeeshan AliNo ratings yet
- Chapter 5 Internal Action in BeamDocument21 pagesChapter 5 Internal Action in BeamTewodros AliNo ratings yet
- Dynamics Machines1Document52 pagesDynamics Machines1Prashant PuriNo ratings yet
- Week 6 - Magnel Dia. & Tendon ProfileDocument27 pagesWeek 6 - Magnel Dia. & Tendon ProfileAlif Akhmizan100% (1)
- 3.1 - StaticBalancing - RotatingMassess in Sigle PlaneDocument40 pages3.1 - StaticBalancing - RotatingMassess in Sigle PlaneDr P Ravinder ReddyNo ratings yet
- Balancing Lecture NoteDocument25 pagesBalancing Lecture NoteKatlego Mokone100% (2)
- ECE 6401 Chapter 4 Overview Static Bending of Thin PlatesDocument18 pagesECE 6401 Chapter 4 Overview Static Bending of Thin PlatesAbcNo ratings yet
- Lecture 16 Rotational Torque Nov 8-1Document22 pagesLecture 16 Rotational Torque Nov 8-1Sterling Phillip ThomasNo ratings yet
- ENGINEERING MECHANICS VOL L STATICS FIFTH EDITION Chapter6 PDFDocument59 pagesENGINEERING MECHANICS VOL L STATICS FIFTH EDITION Chapter6 PDFFrancisco Javier Villate GaonaNo ratings yet
- 2019-Me-111 Lab Report 3 (Reaction of Beam)Document11 pages2019-Me-111 Lab Report 3 (Reaction of Beam)touqeerahmad 9058No ratings yet
- CIE113-ppt Quiz 2 RECORD 1Document16 pagesCIE113-ppt Quiz 2 RECORD 1Daryll FabrosNo ratings yet
- Introduction to Beams Forces DiagramsDocument16 pagesIntroduction to Beams Forces DiagramsEden Alvaro EmilyNo ratings yet
- Beams Calculation - AISC SummaryDocument40 pagesBeams Calculation - AISC SummarycooL_whO_saint100% (2)
- Phys101 Lectures 16, 17, 18: Rotational MotionDocument36 pagesPhys101 Lectures 16, 17, 18: Rotational MotionAldo Setyawan JayaNo ratings yet
- Linear and Angular Quantities: 1 RadianDocument2 pagesLinear and Angular Quantities: 1 RadianPraveen KumarNo ratings yet
- Objectives To Find Compositions of Isometries, Including Glide ReflectionsDocument7 pagesObjectives To Find Compositions of Isometries, Including Glide ReflectionsAbood SafadiNo ratings yet
- Rotating Mass BalancingDocument52 pagesRotating Mass BalancingSAI PRAMOD RAVADANo ratings yet
- GyroscopeDocument7 pagesGyroscopevijay2293No ratings yet
- SOM - Skill Course-2Document53 pagesSOM - Skill Course-2Rohit RanjanNo ratings yet
- Balancing Planar & MultiplanarDocument21 pagesBalancing Planar & MultiplanarMira BunsuNo ratings yet
- Chapter3-3Moment Equationsl (5,6)Document32 pagesChapter3-3Moment Equationsl (5,6)Kirolos AwadNo ratings yet
- Rigid BodiesDocument68 pagesRigid BodiesAmon RoyNo ratings yet
- Analysis of Statically Indeterminate Structures by The Displacement MethodDocument31 pagesAnalysis of Statically Indeterminate Structures by The Displacement MethodDiego Jaramillo BeckerNo ratings yet
- L13 Newton 2nd Law Hirotaka Sato (2)Document38 pagesL13 Newton 2nd Law Hirotaka Sato (2)Imperial ReckerNo ratings yet
- 09 Force Acceleration Methods 19 20Document50 pages09 Force Acceleration Methods 19 20Ibrahim HasanNo ratings yet
- PERHITUNGAN BALOK ATAPFIX - REiDocument8 pagesPERHITUNGAN BALOK ATAPFIX - REiRainhard PurbaNo ratings yet
- ECS468 CHAPTER 1b Frame AnalysisDocument18 pagesECS468 CHAPTER 1b Frame AnalysisRoif SamsulNo ratings yet
- Slab I.D. S-1, S-2, S-9, S-10: Input DataDocument16 pagesSlab I.D. S-1, S-2, S-9, S-10: Input Datahambog kasiNo ratings yet
- Balancing of Rotating MassesDocument9 pagesBalancing of Rotating MassesEricNo ratings yet
- Sme1206-2 0Document25 pagesSme1206-2 0Anantha ReddyNo ratings yet
- SOM Unit 2 WatermarkDocument42 pagesSOM Unit 2 WatermarkShivam GautreNo ratings yet
- Calculo en Vigas 3Document15 pagesCalculo en Vigas 3María Alejandra Velásquez PNo ratings yet
- Dynamics of Particles: K.Murugananthan, Assistant Professor, Kamaraj College of Engineering & Technology. VirudhunagarDocument23 pagesDynamics of Particles: K.Murugananthan, Assistant Professor, Kamaraj College of Engineering & Technology. VirudhunagarAli EspinosaNo ratings yet
- Give AwayDocument6 pagesGive AwayDavid DanielNo ratings yet
- Experiment No. 7 Bending Moment in Beams: Lab Report No.: IST-MECH-SBMA-N06-00/00Document5 pagesExperiment No. 7 Bending Moment in Beams: Lab Report No.: IST-MECH-SBMA-N06-00/00Mansoob BukhariNo ratings yet
- List of Symbols: Symbol Meaning English Units SI UnitsDocument5 pagesList of Symbols: Symbol Meaning English Units SI UnitsFrancis GarciaNo ratings yet
- BalancingDocument70 pagesBalancingMohit SawwalakheNo ratings yet
- Dynamic Modeling of Robot Manipulators in D-H FramesDocument6 pagesDynamic Modeling of Robot Manipulators in D-H FramesPatricio GalarceNo ratings yet
- RCM PDFDocument3 pagesRCM PDFSunita SinglaNo ratings yet
- Byjus'sDocument53 pagesByjus'sSobhit Ranjan Panda100% (1)
- Bending Moment in Beams ExperimentDocument6 pagesBending Moment in Beams ExperimentMansoob BukhariNo ratings yet
- TOM CheatsheetDocument3 pagesTOM Cheatsheetgokusmile776No ratings yet
- ES 204 Assignment 16-b Solutions (Due 03/02) : One Sided The VideoDocument7 pagesES 204 Assignment 16-b Solutions (Due 03/02) : One Sided The VideoSirilak KlakwongNo ratings yet
- 13-Cold Fusion and Gravitational EnergyDocument28 pages13-Cold Fusion and Gravitational EnergyMohammed Al-OdatNo ratings yet
- 8-Fuel CellsDocument28 pages8-Fuel CellsMohammed Al-OdatNo ratings yet
- 16 ObservationsDocument24 pages16 ObservationsMohammed Al-OdatNo ratings yet
- 7-Salinity GradientDocument22 pages7-Salinity GradientMohammed Al-OdatNo ratings yet
- 1 - Introduction To Renewable EnergyDocument28 pages1 - Introduction To Renewable EnergyMohammed Al-OdatNo ratings yet
- 4 Heat Transfer and StorageDocument16 pages4 Heat Transfer and StorageMohammed Al-OdatNo ratings yet
- Course Introduction Today's ClassDocument36 pagesCourse Introduction Today's ClassMohammed Al-OdatNo ratings yet
- 17 FuelCellsDocument57 pages17 FuelCellsMohammed Al-OdatNo ratings yet
- Renewable: EnergyDocument38 pagesRenewable: EnergyMohammed Al-OdatNo ratings yet
- Wind Energy Economics and AnalysisDocument137 pagesWind Energy Economics and AnalysisMohammed Al-OdatNo ratings yet
- 1.1 Energy and Society: Residential Transportation Commercial Industrial A Thought On Energy and GDPDocument12 pages1.1 Energy and Society: Residential Transportation Commercial Industrial A Thought On Energy and GDPMohammed Al-OdatNo ratings yet
- Understanding Energy LimitationsDocument26 pagesUnderstanding Energy LimitationsMohammed Al-OdatNo ratings yet
- Alternate Energy ActivitiesDocument15 pagesAlternate Energy ActivitiessebascianNo ratings yet
- 08 NuclearDocument62 pages08 NuclearMohammed Al-OdatNo ratings yet
- CH 410 Summer 2009 Joe Musgrave and Ted Walker: WWW - Nrel.govDocument21 pagesCH 410 Summer 2009 Joe Musgrave and Ted Walker: WWW - Nrel.govAnnu BhatiaNo ratings yet
- Wind Energy Systems Lectures on Momentum Theory and TurbulenceDocument111 pagesWind Energy Systems Lectures on Momentum Theory and TurbulenceMohammed Al-OdatNo ratings yet
- Energy Conservation OutlineDocument8 pagesEnergy Conservation OutlineMohammed Al-OdatNo ratings yet
- Chemical & Physical Properties of Crude Oil: Module No. 4Document22 pagesChemical & Physical Properties of Crude Oil: Module No. 4Bipul Kumar PaulNo ratings yet
- Chpt8-Wind Turbine ControlDocument58 pagesChpt8-Wind Turbine ControlMohammed Al-OdatNo ratings yet
- Wind PowerDocument20 pagesWind PowerMohammed Al-OdatNo ratings yet
- Wind Energy BasicsDocument33 pagesWind Energy BasicsShona Arum FNo ratings yet
- Crude Oil Characteristics: Properties, Evaluation & Worldwide Quality TrendsDocument13 pagesCrude Oil Characteristics: Properties, Evaluation & Worldwide Quality TrendsMohammed Al-OdatNo ratings yet
- Introduction To Wind Energy: James Mccalley Honors 322W, Wind Energy Honors SeminarDocument28 pagesIntroduction To Wind Energy: James Mccalley Honors 322W, Wind Energy Honors SeminarMohammed Al-OdatNo ratings yet
- Fuel and Its CharacteristicsDocument42 pagesFuel and Its CharacteristicsMohammed Al-OdatNo ratings yet
- Combustion & Fossil FuelsDocument11 pagesCombustion & Fossil FuelsMohammed Al-OdatNo ratings yet
- Coal Properties and TestingDocument13 pagesCoal Properties and TestingMohammed Al-OdatNo ratings yet
- Fuel and Its Characteristics: Prof. Mohammed Al-OdatDocument43 pagesFuel and Its Characteristics: Prof. Mohammed Al-OdatMohammed Al-OdatNo ratings yet
- Energy and EnvoiromentDocument38 pagesEnergy and EnvoiromentMohammed Al-OdatNo ratings yet
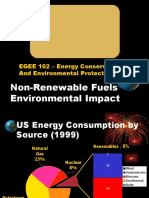
- Non-Renewable Fuels Environmental Impact: EGEE 102 - Energy Conservation and Environmental ProtectionDocument40 pagesNon-Renewable Fuels Environmental Impact: EGEE 102 - Energy Conservation and Environmental ProtectionAshager ShimelashNo ratings yet
- Traditional Energy: Fossil FuelsDocument34 pagesTraditional Energy: Fossil FuelsMohammed Al-OdatNo ratings yet
- Partea IDocument61 pagesPartea ICata OpreaNo ratings yet
- Integrated Wire Mesh Production MachinesDocument36 pagesIntegrated Wire Mesh Production MachinesJavier F. Via GiglioNo ratings yet
- E 180 000 2 11 13Document408 pagesE 180 000 2 11 13spaszko54No ratings yet
- Automatic LatheDocument20 pagesAutomatic LathedevalohithaaNo ratings yet
- FUTURE OF CUSTOM HIRING OF FARM EQUIPMENTDocument6 pagesFUTURE OF CUSTOM HIRING OF FARM EQUIPMENTShailender AdhikariNo ratings yet
- Robotic Symbionts: Interweaving Human and Machine ActionsDocument10 pagesRobotic Symbionts: Interweaving Human and Machine ActionsEsteban AlvarezNo ratings yet
- Vic A TronicDocument25 pagesVic A Tronicfernando leaño zuritaNo ratings yet
- Futurists Hazards of Prophecy PDFDocument13 pagesFuturists Hazards of Prophecy PDFredcloud111100% (2)
- Facility LayoutDocument30 pagesFacility LayoutamitNo ratings yet
- Macaco Mecanico Catalago Kalatec Duffnorton PDFDocument152 pagesMacaco Mecanico Catalago Kalatec Duffnorton PDFmuhammad afrizalNo ratings yet
- Secondary and Tertiary Industries of PakistanDocument21 pagesSecondary and Tertiary Industries of PakistanMuhammad Talha Subhani0% (1)
- Engineer Resume Gubinath BalasubramaniamDocument4 pagesEngineer Resume Gubinath BalasubramaniamGobinath BalasubramaniamNo ratings yet
- Automation Software Architectures in Automated Production Systems An Industrial Case Study in The Packaging Machine Industryproduction EngineeringDocument10 pagesAutomation Software Architectures in Automated Production Systems An Industrial Case Study in The Packaging Machine Industryproduction EngineeringFrank Joel Herrera ApaesteguiNo ratings yet
- Mit SDM ThesisDocument5 pagesMit SDM Thesismhzkehajd100% (2)
- Review For Development of Hydraulic Excavator Attachment: YANG Cheng Huang Kui LI Yinwu WANG Jingchun ZHOU MengDocument5 pagesReview For Development of Hydraulic Excavator Attachment: YANG Cheng Huang Kui LI Yinwu WANG Jingchun ZHOU MengZuhaib ShaikhNo ratings yet
- Curriculum Vitae Europass: Personal InformationDocument16 pagesCurriculum Vitae Europass: Personal InformationAndreiGammerNo ratings yet
- Farm Power and Machinery PDFDocument2 pagesFarm Power and Machinery PDFJake20% (5)
- AdvancedmanuDocument20 pagesAdvancedmanuseraj khanNo ratings yet
- Ansi Code For Protective RelayDocument3 pagesAnsi Code For Protective RelayPuppy Ayu Jatmiko100% (1)
- Introduction To Materials Handling PDFDocument8 pagesIntroduction To Materials Handling PDFhijzain75% (4)
- Statement of Purpose: Seeking an M.S. in Robotics at MITDocument2 pagesStatement of Purpose: Seeking an M.S. in Robotics at MITSoumya Chatterjee76% (17)
- Automobile EngineeringDocument133 pagesAutomobile EngineeringAshok Singh Yadav100% (3)
- Rockwell DCP Programming Guide Part 1 - 1.1 - 050405Document78 pagesRockwell DCP Programming Guide Part 1 - 1.1 - 050405Salai ArulMozhi100% (1)
- Cim ReportDocument23 pagesCim ReportLuqman SuhaimeNo ratings yet
- Toyota - 3FD135 Specifications - ForkliftactionDocument2 pagesToyota - 3FD135 Specifications - ForkliftactionRktBatamNo ratings yet
- Chapter 1: The Problem and A Review of Related Literature RationaleDocument30 pagesChapter 1: The Problem and A Review of Related Literature RationaleRuth MontebonNo ratings yet
- A6vm Service Manual PDFDocument508 pagesA6vm Service Manual PDFEmerson BatistaNo ratings yet
- Introduction To CNC Machine ToolsDocument35 pagesIntroduction To CNC Machine ToolsBharat BhushanNo ratings yet
- Pneumatic Can Crusher SystemDocument21 pagesPneumatic Can Crusher Systemkamleshm2No ratings yet
- B65 TEIL01 e 2007.10.30Document161 pagesB65 TEIL01 e 2007.10.30beckam88100% (2)