You might also like
- Past Exams Tors Vibs and Solns 1516Document20 pagesPast Exams Tors Vibs and Solns 1516SamNo ratings yet
- Dss Application Note Microvib Ii Aircraft Analyzer Aerospatiale/Eurocopter Models As350A/B/D/L, As355E/F/N Helicopter Track and BalanceDocument14 pagesDss Application Note Microvib Ii Aircraft Analyzer Aerospatiale/Eurocopter Models As350A/B/D/L, As355E/F/N Helicopter Track and BalancerobinyNo ratings yet
- 1 Balancing Problems Solution 1Document35 pages1 Balancing Problems Solution 1Mukund Gupta100% (1)
- Simulation of A Spring Mass Damper System Using MatlabDocument54 pagesSimulation of A Spring Mass Damper System Using Matlabshika-san65% (17)
- UNIT 3 Balancing of MassesDocument52 pagesUNIT 3 Balancing of MassesSAI PRAMOD RAVADANo ratings yet
- 3.1 - StaticBalancing - RotatingMassess in Sigle PlaneDocument40 pages3.1 - StaticBalancing - RotatingMassess in Sigle PlaneDr P Ravinder ReddyNo ratings yet
- BalancingDocument70 pagesBalancingMohit SawwalakheNo ratings yet
- BALANCINGDocument72 pagesBALANCINGSerhat YıldırımNo ratings yet
- Sme1206-2 0Document25 pagesSme1206-2 0Anantha ReddyNo ratings yet
- المحاضرة 3Document7 pagesالمحاضرة 3عبدالله باسم خلاوي مانعNo ratings yet
- 4-Problems-Balancing-Rotating MassesDocument5 pages4-Problems-Balancing-Rotating MassesvrushNo ratings yet
- Theory of Machine: BalancingDocument51 pagesTheory of Machine: Balancingnishant dhimanNo ratings yet
- Chapter 3-BalancingDocument30 pagesChapter 3-BalancingHafzal GaniNo ratings yet
- Axle Friction and Thrust Bearings: V. Neo Tarun 18M635Document11 pagesAxle Friction and Thrust Bearings: V. Neo Tarun 18M635Neo TarunNo ratings yet
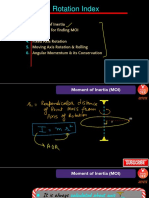
- Rotation IndexDocument52 pagesRotation IndexMohith YNo ratings yet
- Chapter 3-BalancingDocument29 pagesChapter 3-BalancingDanielRaoNo ratings yet
- Balancing of Rigid Rotors and Field Balancing: S K Mondal'sDocument17 pagesBalancing of Rigid Rotors and Field Balancing: S K Mondal'sdinesh veerNo ratings yet
- Assignment3 Writeup PDFDocument10 pagesAssignment3 Writeup PDFLeonardo KnuppNo ratings yet
- Suspension LectureDocument41 pagesSuspension Lecturealex.korobov100% (4)
- Rotational Dynamics-09 - Objective & SubjectiveDocument27 pagesRotational Dynamics-09 - Objective & SubjectiveRaju SinghNo ratings yet
- T01 04 Gil-Martin - Hernandez-Montes - GNP2020Document8 pagesT01 04 Gil-Martin - Hernandez-Montes - GNP2020Kenan KajosevicNo ratings yet
- Exercise - 1 Objective Problems - JEE Main: Section ADocument44 pagesExercise - 1 Objective Problems - JEE Main: Section ARahul ChotaNo ratings yet
- Sheet of Rotational Motion Student Copy With Ans 30-07-2021 1632047789959Document72 pagesSheet of Rotational Motion Student Copy With Ans 30-07-2021 1632047789959PpNo ratings yet
- Wind Turbine Design (Continued) : Lakshmi N Sankar Lsankar@ae - Gatech.eduDocument13 pagesWind Turbine Design (Continued) : Lakshmi N Sankar Lsankar@ae - Gatech.eduMAGRINo ratings yet
- Design of Beams: Part ADocument47 pagesDesign of Beams: Part AMorad AJNo ratings yet
- Student Copy - Cpas - 08Document7 pagesStudent Copy - Cpas - 08Vanshika LudhaniNo ratings yet
- Machine Foundation-Calculation of Unbalance ForceDocument6 pagesMachine Foundation-Calculation of Unbalance Forcesathiyaseelann.sNo ratings yet
- AC Fundamentals..Document32 pagesAC Fundamentals..Adil MehmoodNo ratings yet
- WINSEM2018-19 MEE4007 ETH MB310A VL2018195003564 Reference Material I Helical Gears FundamentalDocument19 pagesWINSEM2018-19 MEE4007 ETH MB310A VL2018195003564 Reference Material I Helical Gears FundamentalSahil PatelNo ratings yet
- Exam2 v13Document10 pagesExam2 v13Jasmine DavisNo ratings yet
- Beams Calculation - AISC SummaryDocument40 pagesBeams Calculation - AISC SummarycooL_whO_saint100% (2)
- Physics 12 April MorningDocument18 pagesPhysics 12 April MorningcrypticgarvNo ratings yet
- Mains Rotational Motion Paper-01Document7 pagesMains Rotational Motion Paper-01Anju MohtaNo ratings yet
- Lab #4: Rolling Friction: A. IntroductionDocument6 pagesLab #4: Rolling Friction: A. IntroductionvalagitNo ratings yet
- COM Teevra SeriesDocument93 pagesCOM Teevra Seriesiitianin2024No ratings yet
- Eletrical Machines (K-Wiki - Synchronous Machines)Document59 pagesEletrical Machines (K-Wiki - Synchronous Machines)qwer100% (1)
- (@bohring - Bot) 25 - 12 - 2023 - SR - IIT - STAR - CO - S (@HeyitsyashXD)Document22 pages(@bohring - Bot) 25 - 12 - 2023 - SR - IIT - STAR - CO - S (@HeyitsyashXD)Idhant SinghNo ratings yet
- BME 601 ToM-II - Question BankDocument15 pagesBME 601 ToM-II - Question BankAditya Kumar GautamNo ratings yet
- D225 Dynamics of Mechanical Systems 2005 Q1Document3 pagesD225 Dynamics of Mechanical Systems 2005 Q1sukrusuNo ratings yet
- Lecture - 1 Balancing of Masses Theory of MachineDocument47 pagesLecture - 1 Balancing of Masses Theory of MachineabasNo ratings yet
- Day 3theory - Slides-1Document5 pagesDay 3theory - Slides-1JunarNo ratings yet
- SMA 2v2Document25 pagesSMA 2v2Min Rot MonNo ratings yet
- Unit II Balancingofrotatingmasses 210207040000Document23 pagesUnit II Balancingofrotatingmasses 210207040000ShanmuganathanNo ratings yet
- 18ME32 MOM @VTUPulse - Com-Mod-3Document20 pages18ME32 MOM @VTUPulse - Com-Mod-3Mohammed Shakeel khudusNo ratings yet
- Manipulator Kinematics: Dr. T. AsokanDocument26 pagesManipulator Kinematics: Dr. T. AsokanHarry WillsmithNo ratings yet
- PHYS 101 - General Physics I Final Exam Solutions: Duration: 120 Minutes Wednesday, 22 May 2019Document4 pagesPHYS 101 - General Physics I Final Exam Solutions: Duration: 120 Minutes Wednesday, 22 May 2019Tuğba AydemirNo ratings yet
- Test - 29-01-24 - 01-29-2024-09-49-34-083 AmDocument3 pagesTest - 29-01-24 - 01-29-2024-09-49-34-083 Amyashvi.jain0507No ratings yet
- CH 05-OCIZLaDocument35 pagesCH 05-OCIZLaSantino Puokleena Yien GatluakNo ratings yet
- Beams - 2Document25 pagesBeams - 2AlkhaledNo ratings yet
- Horizontal Curve Setting: MD Aftabuzzaman, PHDDocument39 pagesHorizontal Curve Setting: MD Aftabuzzaman, PHDJoe NjoreNo ratings yet
- Coupling: Basic Difference BetweenDocument41 pagesCoupling: Basic Difference BetweenKadiyam VijayNo ratings yet
- Study The Methods of Balancing of Multi-Cylinder Engine Like In-Line Engine, Radial Engine, V-EngineDocument28 pagesStudy The Methods of Balancing of Multi-Cylinder Engine Like In-Line Engine, Radial Engine, V-EngineSiddhant BrahmbhattNo ratings yet
- Gear Modifications WindDocument11 pagesGear Modifications Windcosta59dac9242No ratings yet
- ALPS 2310 Physics Assignment SolutionDocument17 pagesALPS 2310 Physics Assignment SolutionSujal KapoorNo ratings yet
- Substitute Frame AnalysisDocument5 pagesSubstitute Frame Analysissiniann7100% (1)
- Synchronous Machine Theory and ModelingDocument108 pagesSynchronous Machine Theory and Modelingnanavarasmdu100% (1)
- RotationDocument17 pagesRotationAkshith IsolaNo ratings yet
- Energy of A Body in A Simple Harmonic Motion (MDocument8 pagesEnergy of A Body in A Simple Harmonic Motion (Mthathalakshman121407No ratings yet
- Wa 11Document7 pagesWa 11Avishkar JaiswalNo ratings yet
- Lecture 16 Rotational Torque Nov 8-1Document22 pagesLecture 16 Rotational Torque Nov 8-1Sterling Phillip ThomasNo ratings yet
- Mca Formula SheetDocument4 pagesMca Formula SheetBharatiyulamNo ratings yet
- Cylindrical Compression Helix Springs For Suspension SystemsFrom EverandCylindrical Compression Helix Springs For Suspension SystemsNo ratings yet
- Nondestructive Examination (NDE) Technology and Codes Student Manual Personnel Qualification and CertificationDocument18 pagesNondestructive Examination (NDE) Technology and Codes Student Manual Personnel Qualification and CertificationSyarif IrwantoNo ratings yet
- Teoria SurgeDocument13 pagesTeoria Surgeparthapaul2000No ratings yet
- Documented InformationDocument5 pagesDocumented InformationbkssdgNo ratings yet
- PWR Pressure Vessel InspectionDocument9 pagesPWR Pressure Vessel InspectionPrashant PuriNo ratings yet
- Pitting Corrosion A ReviewDocument25 pagesPitting Corrosion A ReviewPrashant PuriNo ratings yet
- ASNT Is WhatDocument2 pagesASNT Is WhatPrashant PuriNo ratings yet
- Nondestructive Examination (NDE) Technology and Codes Student Manual Personnel Qualification and CertificationDocument18 pagesNondestructive Examination (NDE) Technology and Codes Student Manual Personnel Qualification and CertificationSyarif IrwantoNo ratings yet
- ASNT-TC1A About PDFDocument20 pagesASNT-TC1A About PDFPrashant PuriNo ratings yet
- UT Certication What RequiredDocument22 pagesUT Certication What RequiredPrashant PuriNo ratings yet
- 09 Chapter4Document29 pages09 Chapter4Prashant PuriNo ratings yet
- 09 Chapter4Document29 pages09 Chapter4Prashant PuriNo ratings yet
- Condenser CondenserDocument47 pagesCondenser CondenserPrashant Puri100% (1)
- Symbol of Weld PDFDocument28 pagesSymbol of Weld PDFSyarif IrwantoNo ratings yet
- Documented InformationDocument5 pagesDocumented InformationbkssdgNo ratings yet
- ECT Signal Effect Noise To Signal RationDocument6 pagesECT Signal Effect Noise To Signal RationPrashant PuriNo ratings yet
- BHEL - Manufacturing Process of 500MW Turbo Generator Bars - Electrical Engg. (EE) Summer TrainingDocument47 pagesBHEL - Manufacturing Process of 500MW Turbo Generator Bars - Electrical Engg. (EE) Summer TrainingVinnie SinghNo ratings yet
- Steam Turbine and Deposits Problems and SolutionsDocument18 pagesSteam Turbine and Deposits Problems and Solutionsjerezg25100% (2)
- 4 3 LMTD With TutorialDocument5 pages4 3 LMTD With TutorialAfrooneyNo ratings yet
- Ultrasonic Testing of Steel CastingDocument38 pagesUltrasonic Testing of Steel CastingPARK, SANGYEOLNo ratings yet
- Sceince DirectDocument6 pagesSceince DirectPrashant PuriNo ratings yet
- UT Certication What RequiredDocument22 pagesUT Certication What RequiredPrashant PuriNo ratings yet
- Sri Hanuman Chalisa in HindiDocument3 pagesSri Hanuman Chalisa in HindiSrivatsa97% (31)
- Question On CondenserDocument2 pagesQuestion On CondenserPrashant PuriNo ratings yet
- La Ko Sure Unsa NiDocument3 pagesLa Ko Sure Unsa NiJeromeNo ratings yet
- MalariaDocument15 pagesMalariaMary ShermanNo ratings yet
- Parliamenary Quewstion For Nuclear Power PlantDocument3 pagesParliamenary Quewstion For Nuclear Power PlantPrashant PuriNo ratings yet
- Manufacturing of InsulationDocument9 pagesManufacturing of InsulationPrashant PuriNo ratings yet
- Welding Procedure PreparationDocument122 pagesWelding Procedure Preparationthe_badass1234100% (21)
- Indian Electrical Motors LimitedDocument12 pagesIndian Electrical Motors LimitedPrashant PuriNo ratings yet
- Ultrasonic Testing of Steel CastingDocument38 pagesUltrasonic Testing of Steel CastingPARK, SANGYEOLNo ratings yet
- Farrat Isolevel: Structural Vibration Isolation Floating Floors Thermal Break ConnectionsDocument8 pagesFarrat Isolevel: Structural Vibration Isolation Floating Floors Thermal Break ConnectionsZahoor AhmedNo ratings yet
- Theory - Reciprocating Engine Vibration AnalysisDocument2 pagesTheory - Reciprocating Engine Vibration AnalysisJose Luis RattiaNo ratings yet
- Maths 3 SyllabusDocument3 pagesMaths 3 SyllabusARUN K CHOCKALINGAMNo ratings yet
- BeFo Rapport 147 Webb (1wer)Document64 pagesBeFo Rapport 147 Webb (1wer)Kaleeswari GNo ratings yet
- Appendix A and B in Geotechnical Earthquake EngineeringDocument35 pagesAppendix A and B in Geotechnical Earthquake EngineeringEl-kapitan AdetiaNo ratings yet
- Rotor BalancingDocument13 pagesRotor BalancingWail Izzeldin100% (1)
- Aqwa Programs Tutorial-2Document17 pagesAqwa Programs Tutorial-2Syed Hasan100% (1)
- Phonetics Acoustic PhoneticsDocument52 pagesPhonetics Acoustic PhoneticsWidad Widad0% (1)
- Rajalakshmi Institute of Technology: CHENNAI - 602 107 Department of Mechanical EngineeringDocument6 pagesRajalakshmi Institute of Technology: CHENNAI - 602 107 Department of Mechanical Engineeringthamizh609No ratings yet
- Free Damped VibrationDocument50 pagesFree Damped VibrationPraful KhondeNo ratings yet
- Night School 23 Session 1Document54 pagesNight School 23 Session 1Luis CortesNo ratings yet
- A Look at The Seismic Risk of Italian Code-Conforming RC BuildingsDocument12 pagesA Look at The Seismic Risk of Italian Code-Conforming RC BuildingsYorgos BaltzopoulosNo ratings yet
- 9702 w10 QP 42Document24 pages9702 w10 QP 42Dewan Olin ChotepadaeNo ratings yet
- Lifetime Prediction For Bearing in Induction Motors by Shu Tzu Chang (Paper-2019)Document5 pagesLifetime Prediction For Bearing in Induction Motors by Shu Tzu Chang (Paper-2019)emmanuel799No ratings yet
- Vibro-Acoustics: A New Springer PublicationDocument9 pagesVibro-Acoustics: A New Springer PublicationcharcharNo ratings yet
- Design of Foundations For Offshore Wind Turbines: December 2018Document7 pagesDesign of Foundations For Offshore Wind Turbines: December 2018Việt DũngNo ratings yet
- Me6603 Notes Rejinpaul Fea PDFDocument155 pagesMe6603 Notes Rejinpaul Fea PDFFakkir Mohamed100% (2)
- Data SheetDocument17 pagesData Sheetaladin namlunNo ratings yet
- VibrationDocument54 pagesVibrationmayureshrmahajan100% (3)
- Methods For Diagnostics of Bearings in Non-Stationary EnvironmentsDocument6 pagesMethods For Diagnostics of Bearings in Non-Stationary EnvironmentsLakshithaNo ratings yet
- M.E. Engineering Design Anna University Syllabus Reg 2021Document24 pagesM.E. Engineering Design Anna University Syllabus Reg 2021Boopathi KalaiNo ratings yet
- ME STR Syllabus-R22-FinalDocument135 pagesME STR Syllabus-R22-FinalSwapnil KNo ratings yet
- 40T Broadband SeismometerDocument7 pages40T Broadband SeismometerSteveAbonyiNo ratings yet
- A84 Reyes KalkanDocument20 pagesA84 Reyes Kalkanmansoor_yakhchalian2No ratings yet
- Wind Design As BNBC 2020Document46 pagesWind Design As BNBC 2020rafia kamal0% (1)
- Shivam Agarwal Shivam AgarwalDocument3 pagesShivam Agarwal Shivam AgarwalmadhuagarwalyoyoyoNo ratings yet
- Mechanical VibrationsDocument12 pagesMechanical VibrationsDhiyanesh WaranNo ratings yet