You might also like
- AirBag ToyotaDocument7 pagesAirBag Toyotashadow_smdkNo ratings yet
- Mahindra Price ListDocument1 pageMahindra Price Listkishan KumarNo ratings yet
- Gauge Control Module 2013-2018 TroubleshootingDocument67 pagesGauge Control Module 2013-2018 TroubleshootingTotall AutomotrízNo ratings yet
- Trouble Diagnosis Circuit Diagram: (Yd Type 2)Document11 pagesTrouble Diagnosis Circuit Diagram: (Yd Type 2)enero486No ratings yet
- How To Use Electrical Wiring Diagram: Section 1Document257 pagesHow To Use Electrical Wiring Diagram: Section 1drecibeloNo ratings yet
- Engine Data ListDocument48 pagesEngine Data ListPham Tuan AnhNo ratings yet
- PB Air Conditioning EngDocument18 pagesPB Air Conditioning EngNitin VanjariNo ratings yet
- Maxximo: Diagnostic Manual MAN-00129Document1 pageMaxximo: Diagnostic Manual MAN-00129LeelaNo ratings yet
- Diagrama de Coneccion de Motores para CNCDocument1 pageDiagrama de Coneccion de Motores para CNCFreddy CajasNo ratings yet
- Engine Control SystemACCENTpdfDocument1 pageEngine Control SystemACCENTpdfDelsy SimbronNo ratings yet
- Engine Controls Engine Controls: Page 1 of 5Document6 pagesEngine Controls Engine Controls: Page 1 of 5Oscar LópezNo ratings yet
- Atos Fuel SDocument133 pagesAtos Fuel Singenieriaelectronic100% (1)
- 83 Plano Elec PDFDocument6 pages83 Plano Elec PDFManuel CanazaNo ratings yet
- Tracción ControlDocument212 pagesTracción Controltallermae100% (1)
- Ci P0500Document2 pagesCi P0500David BenazeraNo ratings yet
- Absorber Control Indicator Light CircuitDocument2 pagesAbsorber Control Indicator Light Circuitbob loblawNo ratings yet
- Product Introduction Product Introduction: LEXUS LS600h/LS600hL Hybrid System Power Control Unit (PCU)Document4 pagesProduct Introduction Product Introduction: LEXUS LS600h/LS600hL Hybrid System Power Control Unit (PCU)Вячеслав ГлушакNo ratings yet
- Panasonic WP1400 PDFDocument69 pagesPanasonic WP1400 PDFboroda2410No ratings yet
- Escape 2002 PDFDocument4 pagesEscape 2002 PDFLuis GongoraNo ratings yet
- 2GR-FE Engine CKP Sensor CodesDocument7 pages2GR-FE Engine CKP Sensor CodesYdelkadiasmela Dominguezmorel100% (1)
- DTC P1349/73 VVT System Malfunction: Wiring DiagramDocument5 pagesDTC P1349/73 VVT System Malfunction: Wiring DiagramAnonymous tWYsgPmNo ratings yet
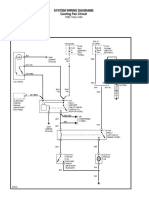
- 2012 Nissan Frontier S 2012 Nissan Frontier S: System Wiring Diagrams System Wiring DiagramsDocument1 page2012 Nissan Frontier S 2012 Nissan Frontier S: System Wiring Diagrams System Wiring DiagramsSergio HernandezNo ratings yet
- 1997 Nissan Altima ECU Pinout GuideDocument8 pages1997 Nissan Altima ECU Pinout GuideEscobar Medellin Juan Pablo0% (1)
- Ipdm E/R (Intelligent Power Distribution Module Engine Room)Document1 pageIpdm E/R (Intelligent Power Distribution Module Engine Room)Marc AmoresNo ratings yet
- Tachometer Using Frequency To Voltage ConverterDocument25 pagesTachometer Using Frequency To Voltage Converterഹരി ചിന്തകൾNo ratings yet
- Abs TDocument16 pagesAbs TAlbert BriceñoNo ratings yet
- Engine Control (5Vz-Fe) : System OutlineDocument10 pagesEngine Control (5Vz-Fe) : System OutlineTdco SonicoNo ratings yet
- ActyonB0802016 PDFDocument7 pagesActyonB0802016 PDFRms AutomotrizNo ratings yet
- Ec Harness ConectorDocument15 pagesEc Harness ConectorHawkar SuleimanNo ratings yet
- Automotive AbbreviationsDocument5 pagesAutomotive Abbreviationsiman1tt100% (1)
- Diagnosing Air Suspension Height Control IssuesDocument3 pagesDiagnosing Air Suspension Height Control Issuesbob loblawNo ratings yet
- Grand Am Continental Tire Sports Integrating ECU PDFDocument31 pagesGrand Am Continental Tire Sports Integrating ECU PDFsenthilvlNo ratings yet
- Harness & Circuit DiagramDocument71 pagesHarness & Circuit DiagramTomy100% (1)
- Harness & Wiring Diagram: To IndexDocument58 pagesHarness & Wiring Diagram: To Indexhidraulic100% (2)
- Acura 90Document1 pageAcura 90Alfredo jose Medina revattaNo ratings yet
- P1449 Fallos de La Batería Del Civic Híbrido.Document4 pagesP1449 Fallos de La Batería Del Civic Híbrido.Norman Valle SáenzNo ratings yet
- BSD104DV H3axDocument21 pagesBSD104DV H3axTiborNo ratings yet
- Code P1693Document21 pagesCode P1693احمدميدوNo ratings yet
- Programming Operation For GW Vehicle Immobilizer SystemDocument38 pagesProgramming Operation For GW Vehicle Immobilizer SystemPablo NuñezNo ratings yet
- CAN Communication PDFDocument68 pagesCAN Communication PDFAlfredo Medina100% (1)
- Engine Control System OverviewDocument957 pagesEngine Control System OverviewElena BujorNo ratings yet
- Toyota 1Document5 pagesToyota 1Jose F. SeguraNo ratings yet
- T TC014 06Document2 pagesT TC014 06mario100% (1)
- EPS (TMT Made From Oct. 2017 Production Until Jan. 2018 Production, From Jan. 2018 Production)Document8 pagesEPS (TMT Made From Oct. 2017 Production Until Jan. 2018 Production, From Jan. 2018 Production)Angel Rodríguez100% (1)
- 28 COROLLA / AURIS OVERALL ELECTRICAL WIRING DIAGRAMDocument1 page28 COROLLA / AURIS OVERALL ELECTRICAL WIRING DIAGRAMvarenziaNo ratings yet
- V3040DDocument8 pagesV3040DmohammadNo ratings yet
- Diagrama A Honda Civid Hybrid 2009Document1 pageDiagrama A Honda Civid Hybrid 2009enio romeroNo ratings yet
- Abs Lexus Gx470 2007Document12 pagesAbs Lexus Gx470 2007Nguyen ManhNo ratings yet
- 2016 Chevrolet Captiva-INMO-DIAGRAMDocument3 pages2016 Chevrolet Captiva-INMO-DIAGRAMPANHA MENNo ratings yet
- 8 Corolla / Auris (Cont. Next Page) : Engine Control (1ZR-FE, 2ZR-FE)Document5 pages8 Corolla / Auris (Cont. Next Page) : Engine Control (1ZR-FE, 2ZR-FE)Amal TharakaNo ratings yet
- 3s FuelDocument310 pages3s FuelPrecisionetica100% (3)
- Toyota Hilux 2018 Overall EWD Vehicle Exterior Headlight Beam Level Control (Manual)Document1 pageToyota Hilux 2018 Overall EWD Vehicle Exterior Headlight Beam Level Control (Manual)gabrielzinho43No ratings yet
- Stavic Ewd LHDDocument239 pagesStavic Ewd LHDERMINSUL VICUÑA SALASNo ratings yet
- ECM PINOUT Chevrolet-Sail PDFDocument2 pagesECM PINOUT Chevrolet-Sail PDFJhonatan Jibaja RamírezNo ratings yet
- Basic of MPX (Multiplex Communication) 1. GeneralDocument7 pagesBasic of MPX (Multiplex Communication) 1. Generaldima65No ratings yet
- Ecu-Pin PDFDocument39 pagesEcu-Pin PDFJimmy Brian KaifitiNo ratings yet
- Tiida PowerDocument62 pagesTiida PowerChristopher Anderson100% (1)
- TND6041-D DC Motor Driver Fundamentals PDFDocument9 pagesTND6041-D DC Motor Driver Fundamentals PDFAlex CarmonaNo ratings yet
- TND6041-D DC Motor Driver Fundamentals PDFDocument9 pagesTND6041-D DC Motor Driver Fundamentals PDFAlex CarmonaNo ratings yet
- 00905B PDFDocument10 pages00905B PDFusamafalakNo ratings yet
- Volvo 240 Owners Manual 1992 PDFDocument160 pagesVolvo 240 Owners Manual 1992 PDFΖαχος ΤσελιοςNo ratings yet
- Volvo Transmission A340Document8 pagesVolvo Transmission A340Ahmed I. EltaherNo ratings yet
- 1992 Volvo 240 Wiring DiagramsDocument23 pages1992 Volvo 240 Wiring DiagramsAhmed I. Eltaher100% (1)
- Blue Print Tech Article EPS Part2 PDFDocument3 pagesBlue Print Tech Article EPS Part2 PDFWawan SatiawanNo ratings yet
- Machines: Challenges in Winding Design and Thermal Calculations: Physical Model of Permanent Magnet Synchronous MachineDocument15 pagesMachines: Challenges in Winding Design and Thermal Calculations: Physical Model of Permanent Magnet Synchronous Machineidriss habibiNo ratings yet
- Magnetic Effects of Current WorksheetDocument11 pagesMagnetic Effects of Current Worksheetkobayashirei602No ratings yet
- How To Calculate Ferrite Core TransformersDocument14 pagesHow To Calculate Ferrite Core TransformersAhmed HeskolNo ratings yet
- 3rd Quarter Exam PT ReviewerDocument20 pages3rd Quarter Exam PT ReviewerJocel LabineNo ratings yet
- Atlanta Transformer ComponentsDocument74 pagesAtlanta Transformer Componentsalex696No ratings yet
- RMXPRT GuideDocument109 pagesRMXPRT GuideDilipNo ratings yet
- TN04 1003Document4 pagesTN04 1003Frank FlindersNo ratings yet
- Igcse 61 Magnetism&ElectromagnetismDocument32 pagesIgcse 61 Magnetism&ElectromagnetismHany ElGezawy100% (4)
- UU ET Series Common Mode ChokesDocument12 pagesUU ET Series Common Mode ChokespzcoilNo ratings yet
- Project InverterDocument67 pagesProject InverterKeshavGargNo ratings yet
- Barbosa 150426021227 Conversion Gate01Document6 pagesBarbosa 150426021227 Conversion Gate01zac2351No ratings yet
- Insulation Resistance (IR) Values - Electrical Notes & ArticlesDocument37 pagesInsulation Resistance (IR) Values - Electrical Notes & Articlesnyong dro100% (1)
- Vector GroupDocument24 pagesVector GroupRuchir Pandey HSET, SRHUNo ratings yet
- Design and Construction of Child Rescue Pneumatic SystemDocument63 pagesDesign and Construction of Child Rescue Pneumatic SystemVimal SNo ratings yet
- Vol 1 ING - Vers 2018 PDFDocument210 pagesVol 1 ING - Vers 2018 PDFAlessandro Ribeiro Soares De QueirozNo ratings yet
- Vocational Training Reort of NTPC SipatDocument22 pagesVocational Training Reort of NTPC Sipatmuskan sharmaNo ratings yet
- Unit 1-ELECTROMAGNETISMDocument19 pagesUnit 1-ELECTROMAGNETISMmohd mahathir100% (11)
- S I 32-251-3Document68 pagesS I 32-251-3CatalinGhineaNo ratings yet
- RMD Motor TypesDocument19 pagesRMD Motor TypesMuhammed AyyubNo ratings yet
- Al Qaem Seminary: Subject: Physics Class: Form IvDocument11 pagesAl Qaem Seminary: Subject: Physics Class: Form IvVicent EdsonNo ratings yet
- Transformer Failure Modes 20130820Document47 pagesTransformer Failure Modes 20130820Adiel Camarillo Narvaez100% (1)
- UntitledDocument31 pagesUntitledJulio CruzNo ratings yet
- Bus and Line ProtectionDocument26 pagesBus and Line ProtectionYugendran KumaravelNo ratings yet
- Servo Motor Design Using MotorSolveDocument20 pagesServo Motor Design Using MotorSolveSK PNo ratings yet
- 2-Stator WindingDocument42 pages2-Stator WindingSuparnoWitoradyoNo ratings yet
- Sir NotesDocument600 pagesSir Notessiddharth mohantyNo ratings yet
- Catalog - Rotating Electrical MachinesDocument24 pagesCatalog - Rotating Electrical MachinesAshhAlexNo ratings yet
- A Guide To AC Motor Repair and ReplacementDocument24 pagesA Guide To AC Motor Repair and ReplacementApostolie Iulian100% (1)
- Magnetomotive Force and Reluctance Magnetic Circuit GuideDocument63 pagesMagnetomotive Force and Reluctance Magnetic Circuit Guidesubhash_tuhhNo ratings yet
- Modeling For The Design of Fractional Slot PM Machines With Concentrated Windings Protected From Demagnetization During Three-Phase Short CircuitDocument8 pagesModeling For The Design of Fractional Slot PM Machines With Concentrated Windings Protected From Demagnetization During Three-Phase Short CircuitFaiza OuiddirNo ratings yet