You might also like
- GOVERNORS REGULATE ENGINE SPEEDDocument42 pagesGOVERNORS REGULATE ENGINE SPEEDBiswanath samantaNo ratings yet
- Study of Flywheel: Visit For More Learning ResourcesDocument50 pagesStudy of Flywheel: Visit For More Learning ResourcesAditi RayNo ratings yet
- GOVERNOR TYPES & WORKING 40Document42 pagesGOVERNOR TYPES & WORKING 40Ambreen UmarNo ratings yet
- Ch5 GovrnorsDocument40 pagesCh5 GovrnorsChirag SharmaNo ratings yet
- Mechanical GovernorsDocument23 pagesMechanical Governorsahmadhamada0511No ratings yet
- Governor Fundamentals and Power ManagementDocument18 pagesGovernor Fundamentals and Power Managementrandhir1112No ratings yet
- Unit - 5Document46 pagesUnit - 5vivekselvan2No ratings yet
- 4 DynamometerDocument8 pages4 DynamometerParesh PatilNo ratings yet
- DOM - Governor NotesDocument17 pagesDOM - Governor NotesEssKay0% (1)
- Proyecto de Vibras 2.165Document6 pagesProyecto de Vibras 2.165Pablo AquinoNo ratings yet
- Angular velocity and forces in reciprocating enginesDocument39 pagesAngular velocity and forces in reciprocating enginesrajashekar reddy nallalaNo ratings yet
- MIN 301 Dynamics of Machines ExperimentsDocument12 pagesMIN 301 Dynamics of Machines ExperimentsSaifullah AhmadNo ratings yet
- Experiment 2Document11 pagesExperiment 2azizsaafanNo ratings yet
- R R R W: 0.4 Rad/s 0.8 Rad/sDocument3 pagesR R R W: 0.4 Rad/s 0.8 Rad/sGupta GurunadhGuptaNo ratings yet
- Unit # 8 Governor: Mechanis of Material & Machines 1Document27 pagesUnit # 8 Governor: Mechanis of Material & Machines 1api-19790673100% (2)
- SRV02-Series Ball & Beam: Student HandoutDocument13 pagesSRV02-Series Ball & Beam: Student HandoutKeli KeyNo ratings yet
- Speed GovernorDocument16 pagesSpeed Governorرعد العكيليNo ratings yet
- Governor PDFDocument94 pagesGovernor PDFmudit verma0% (1)
- Fluid MechanicsDocument9 pagesFluid MechanicsulkuNo ratings yet
- Chapter3 GovernorDocument16 pagesChapter3 GovernorBazli Faiq Zaini100% (1)
- Whirling of Shaft SMM 3 by NITK SurathkalDocument20 pagesWhirling of Shaft SMM 3 by NITK SurathkalMarilyn PetersNo ratings yet
- Chapter 4 GovernersDocument26 pagesChapter 4 GovernersPrasenjit ChatterjeeNo ratings yet
- Governors For HNDE (Mech) - Labuduwa: 1. Watt GovernorDocument12 pagesGovernors For HNDE (Mech) - Labuduwa: 1. Watt Governors_nimalanNo ratings yet
- GyroscopeDocument7 pagesGyroscopevijay2293No ratings yet
- Performance of a Pelton WheelDocument17 pagesPerformance of a Pelton Wheellimakupang_matNo ratings yet
- Velocidade de LancamentoDocument4 pagesVelocidade de LancamentoCharles CordeiroNo ratings yet
- Lec - 9Document12 pagesLec - 9Sam RockxNo ratings yet
- Unit 4. GovernorsDocument17 pagesUnit 4. GovernorsMugisha OlivierNo ratings yet
- GovernorsDocument69 pagesGovernorsBiswajyoti Dutta100% (1)
- Exercise 7 Dynamic Balancing of Rigid RotorsDocument7 pagesExercise 7 Dynamic Balancing of Rigid RotorsAnonymous dqbb02DUhNo ratings yet
- Balancing IntroductionDocument28 pagesBalancing IntroductionArun Raja K KNo ratings yet
- Brakes and DynamometersDocument32 pagesBrakes and DynamometersAjinkya NaikNo ratings yet
- 01 Engine Force AnalysisDocument27 pages01 Engine Force AnalysisSunny DesharNo ratings yet
- 2 DOF Ball Balancer - Workbook (Instructor)Document32 pages2 DOF Ball Balancer - Workbook (Instructor)Raaj LavaNo ratings yet
- 2 DOF Ball Balancer - Workbook (Instructor) PDFDocument32 pages2 DOF Ball Balancer - Workbook (Instructor) PDFRaaj LavaNo ratings yet
- ME 309 EXPERIMENTAL ANALYSIS OF PORTER GOVERNORDocument6 pagesME 309 EXPERIMENTAL ANALYSIS OF PORTER GOVERNORNeha HebbarNo ratings yet
- 3D Controller and Trajectory Generation for QuadrotorsDocument10 pages3D Controller and Trajectory Generation for QuadrotorsLeonardo KnuppNo ratings yet
- Construction and Working:: Porter GovernorDocument5 pagesConstruction and Working:: Porter Governoraverify53No ratings yet
- Dynamic Analysis of Engine Valvetrain and Its Effects On CamshaftDocument5 pagesDynamic Analysis of Engine Valvetrain and Its Effects On CamshaftIjsrnet EditorialNo ratings yet
- 7.1. Classification of GovernorsDocument56 pages7.1. Classification of GovernorsaddisudagneNo ratings yet
- VRATILO Petar FinishDocument28 pagesVRATILO Petar FinishPetar JuricNo ratings yet
- 1 EX-5519-Variable-g-PendulumDocument7 pages1 EX-5519-Variable-g-PendulumSohaib IrfanNo ratings yet
- GyroscopeDocument7 pagesGyroscopeRajesh SarkarNo ratings yet
- CH-18 GovernorDocument42 pagesCH-18 GovernorMusfiq AlamNo ratings yet
- Chapter 3-BalancingDocument29 pagesChapter 3-BalancingDanielRaoNo ratings yet
- Basic Design Procedure of ShaftDocument19 pagesBasic Design Procedure of ShaftvrushilNo ratings yet
- The Elementary Mathematical Model: 2. 1 Swing EquationDocument40 pagesThe Elementary Mathematical Model: 2. 1 Swing EquationMarian ArjonaNo ratings yet
- Programming Exercise 3: 3D Controller and Trajectory GenerationDocument10 pagesProgramming Exercise 3: 3D Controller and Trajectory GenerationhemanthkandulaNo ratings yet
- Chapter 4.7-OnDocument42 pagesChapter 4.7-OnBelayneh Tadesse100% (3)
- Energy-14Document13 pagesEnergy-14harsh gargNo ratings yet
- Lecture 19Document36 pagesLecture 19castles15No ratings yet
- Motor-Generator Test Results Disprove Physics LawsDocument9 pagesMotor-Generator Test Results Disprove Physics LawsMihai DanielNo ratings yet
- Balancing Reciprocating MassesDocument29 pagesBalancing Reciprocating MassesPraful KhondeNo ratings yet
- CH-18 GovernorDocument42 pagesCH-18 Governorsumit20264No ratings yet
- B1 Critical Speed of ShaftDocument13 pagesB1 Critical Speed of ShaftAkash BargeNo ratings yet
- MIT16 07F09 Lec23Document7 pagesMIT16 07F09 Lec23kapilkumar18No ratings yet
- Dynamics of Machinery: GovernorsDocument11 pagesDynamics of Machinery: GovernorsaNo ratings yet
- Ch09 SSM 070904Document26 pagesCh09 SSM 070904VinhTranNo ratings yet
- Transmissibility: FT (T) Is The Force Transmitted To The Supporting Structure or Base. The Force Transmitted ThroughDocument3 pagesTransmissibility: FT (T) Is The Force Transmitted To The Supporting Structure or Base. The Force Transmitted ThroughPrabhu GNo ratings yet
- Sess 42Document2 pagesSess 42Prabhu GNo ratings yet
- Sess 44Document2 pagesSess 44Prabhu GNo ratings yet
- Sess 45Document1 pageSess 45Prabhu GNo ratings yet
- Gyroscopic Forces and Torques: Plane of SpinningDocument4 pagesGyroscopic Forces and Torques: Plane of SpinningPrabhu GNo ratings yet
- Controlling Force:: Controlling Force Diagram. This Diagram Enables The Stability and Sensitiveness of TheDocument4 pagesControlling Force:: Controlling Force Diagram. This Diagram Enables The Stability and Sensitiveness of ThePrabhu GNo ratings yet
- UNIT-V - GOVERNORS - IntroductionDocument2 pagesUNIT-V - GOVERNORS - IntroductionPrabhu GNo ratings yet
- Characteristics of Governors: StabilityDocument3 pagesCharacteristics of Governors: StabilityPrabhu GNo ratings yet
- Types - Centrifugal GovernorsDocument3 pagesTypes - Centrifugal GovernorsPrabhu GNo ratings yet
- Unit - 1 Casting: DATE:-10.08.2020 TIME:-1.30 To 2.30 PMDocument24 pagesUnit - 1 Casting: DATE:-10.08.2020 TIME:-1.30 To 2.30 PMPrabhu GNo ratings yet
- Production Data Analysis in Sahara UnconventionalDocument4 pagesProduction Data Analysis in Sahara UnconventionalJhoan UrdanetaNo ratings yet
- SOLAR WATER HEATER - ppt1Document20 pagesSOLAR WATER HEATER - ppt1Manoj KannanNo ratings yet
- The Ins and Outs of Human Cognition in The Construction of MeaningDocument11 pagesThe Ins and Outs of Human Cognition in The Construction of MeaningmarceloNo ratings yet
- 10 PhysicsDocument4 pages10 PhysicsNicka Asereht MinaNo ratings yet
- 3 APH PERFORMANCE in NTPC STATIONS AjaySharmaDocument15 pages3 APH PERFORMANCE in NTPC STATIONS AjaySharmaDSGNo ratings yet
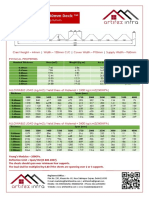
- ARTIFEX INFRA - 44mm Decksheet ProfileDocument1 pageARTIFEX INFRA - 44mm Decksheet ProfileAmit SharmaNo ratings yet
- Hydraulics and Irrigation Engineering (Lab Part) (Lecture#1)Document13 pagesHydraulics and Irrigation Engineering (Lab Part) (Lecture#1)Mushraf RazaNo ratings yet
- 1st Progress Report - Mert KarakaşDocument5 pages1st Progress Report - Mert KarakaşMNo ratings yet
- University of Cambridge International Examinations General Certificate of Education Advanced Subsidiary Level and Advanced LevelDocument24 pagesUniversity of Cambridge International Examinations General Certificate of Education Advanced Subsidiary Level and Advanced LevelAshfaaq SkadamNo ratings yet
- Matrices EssentialsDocument22 pagesMatrices Essentialsmolahstudios100% (12)
- Servising and Procedure Catalog CF 10031 8-10 R01 en PDFDocument434 pagesServising and Procedure Catalog CF 10031 8-10 R01 en PDFphong100% (1)
- Lecture 2 v1Document26 pagesLecture 2 v1Anwar Hossain PolasNo ratings yet
- TechMaths Gr10 LB EngDocument432 pagesTechMaths Gr10 LB EngSam AlexanderNo ratings yet
- Pontryagin Principle of Maximum Time-Optimal Control: Constrained Control, Bang-Bang ControlDocument14 pagesPontryagin Principle of Maximum Time-Optimal Control: Constrained Control, Bang-Bang ControldhayanethraNo ratings yet
- Semiconductor Electronics: Materials, Devices and Simple CircuitsDocument16 pagesSemiconductor Electronics: Materials, Devices and Simple Circuitspawan paudelNo ratings yet
- Lesson 2 Divisibility Rules of 3, 6, & 9Document19 pagesLesson 2 Divisibility Rules of 3, 6, & 9jsphmnsycjrscribdNo ratings yet
- Roles of Maths A) Towards Individual: - Social DevelopmentDocument4 pagesRoles of Maths A) Towards Individual: - Social DevelopmentZulatfi Bin Mat Ripin IPGKDRINo ratings yet
- TNPSC: I Prelims Test Plan - 2020Document5 pagesTNPSC: I Prelims Test Plan - 2020s.ranjithNo ratings yet
- Consolidation Test Results and ParametersDocument25 pagesConsolidation Test Results and ParametersSAIB BRAHIMNo ratings yet
- Design of T BeamDocument5 pagesDesign of T BeamAnton_Young_1962No ratings yet
- MV March2018 EsasDocument9 pagesMV March2018 EsasMargo Isay EriveNo ratings yet
- Synchronicity Acausal Connection and The Fractal Dynamics of Clinical PracticeDocument20 pagesSynchronicity Acausal Connection and The Fractal Dynamics of Clinical PracticeDaria DanielNo ratings yet
- Determination of DensitiesDocument4 pagesDetermination of DensitiesJulian CarantoNo ratings yet
- Storage and Handling of SolidsDocument43 pagesStorage and Handling of Solidsmadhav100% (1)
- BIOENGINEERING L-605 COBALT CHROMIUM CARDIOVASCULAR STENTDocument1 pageBIOENGINEERING L-605 COBALT CHROMIUM CARDIOVASCULAR STENTpratyeshNo ratings yet
- Graphing Secant and Cosecant 1Document26 pagesGraphing Secant and Cosecant 1WilmarieNo ratings yet
- GIET UNIVERSITY PARTIAL DIFFERENTIAL EQUATIONS EXAMDocument2 pagesGIET UNIVERSITY PARTIAL DIFFERENTIAL EQUATIONS EXAMPritesh RayaguruNo ratings yet
- 3 6 2-SHMDocument57 pages3 6 2-SHMeren parkNo ratings yet
- So You Want To Learn Physics... - Susan FowlerDocument48 pagesSo You Want To Learn Physics... - Susan FowlerYianniNo ratings yet
- Laser and MaserDocument10 pagesLaser and MaserDrAnkita V. KushwahaNo ratings yet