You might also like
- Project Riske ManagementDocument7 pagesProject Riske ManagementMohammed Lawal AhmedNo ratings yet
- Biomedical EngineeringDocument12 pagesBiomedical EngineeringBiomedical Engineering100% (1)
- Road Detection PaperDocument14 pagesRoad Detection Papersaeb2saebNo ratings yet
- Final FYP PPT - Road MapperDocument38 pagesFinal FYP PPT - Road MapperViral ShahNo ratings yet
- Learning To Detect Roads in High-Resolution Aerial ImagesDocument14 pagesLearning To Detect Roads in High-Resolution Aerial ImagesAlim SheikhNo ratings yet
- City-Scale Road Extraction from Satellite Imagery v2: Travel TimesDocument10 pagesCity-Scale Road Extraction from Satellite Imagery v2: Travel Timeshenri joel jrNo ratings yet
- Road Scene Segmentation from Noisy Labels and Color Plane FusionDocument14 pagesRoad Scene Segmentation from Noisy Labels and Color Plane FusioncseteanikoNo ratings yet
- 1 s2.0 S0303243421001367 MainDocument11 pages1 s2.0 S0303243421001367 MainFijo MjNo ratings yet
- Sujatha-Selvathi2015 Article ConnectedComponent-basedTechniDocument16 pagesSujatha-Selvathi2015 Article ConnectedComponent-basedTechniJoão JúniorNo ratings yet
- Ruas 2017Document256 pagesRuas 2017tek bahadur katuwalNo ratings yet
- Mobile Robot Monocular Vision Navigation Based On Road Region and Boundary EstimationDocument8 pagesMobile Robot Monocular Vision Navigation Based On Road Region and Boundary EstimationArtur Faby Jimenez BonillaNo ratings yet
- Monocular Road Terrain Detection Using Visual and Spatial InformationDocument11 pagesMonocular Road Terrain Detection Using Visual and Spatial InformationKedarNo ratings yet
- Lane - NIT-1Document11 pagesLane - NIT-1narendra29000No ratings yet
- Hierachical Route PlanningDocument5 pagesHierachical Route Planningvarunsingh214761No ratings yet
- Sustainability 11 04511 v2Document19 pagesSustainability 11 04511 v2ravichoprascribdNo ratings yet
- 5435-Article Text-8660-1-10-20200511Document8 pages5435-Article Text-8660-1-10-20200511Dipan MehtaNo ratings yet
- Remote Sensing: Automatic Road Centerline Extraction From Imagery Using Road GPS DataDocument20 pagesRemote Sensing: Automatic Road Centerline Extraction From Imagery Using Road GPS DataJoão JúniorNo ratings yet
- Paper For Worldcomp-FinalpaperDocument7 pagesPaper For Worldcomp-FinalpaperVijaya NatarajanNo ratings yet
- A Contribution To Solving The Travelling Salesman Problem Using Ant Colony Optimization and Web Mapping PlatformsDocument7 pagesA Contribution To Solving The Travelling Salesman Problem Using Ant Colony Optimization and Web Mapping PlatformsZougoulougouNo ratings yet
- Base PaperDocument12 pagesBase PaperRenji RajNo ratings yet
- Accepted Manuscript: NeurocomputingDocument33 pagesAccepted Manuscript: Neurocomputingalex vargheseNo ratings yet
- Research_on_road_extraction_from_high-resolution_remote_sensing_images_based_on_improved_UNetDocument10 pagesResearch_on_road_extraction_from_high-resolution_remote_sensing_images_based_on_improved_UNetBharath RNo ratings yet
- Reference Notes2 27Document8 pagesReference Notes2 27Pratima SinghNo ratings yet
- Map Matching For Intelligent Speed AdaptationDocument12 pagesMap Matching For Intelligent Speed Adaptationajainb239No ratings yet
- High-Fidelity Roadway Modeling and Simulation: Jie Wang Yiannis Papelis Yuzhong Shen Ozhan Unal Mecit CetinDocument6 pagesHigh-Fidelity Roadway Modeling and Simulation: Jie Wang Yiannis Papelis Yuzhong Shen Ozhan Unal Mecit CetinBrad DfNo ratings yet
- SemiAutomatic Extraction of Geometric Elements of Curved Ramps From Google Earth ImagesSustainability SwitzerlandDocument16 pagesSemiAutomatic Extraction of Geometric Elements of Curved Ramps From Google Earth ImagesSustainability SwitzerlandBruce ChavezNo ratings yet
- Segmentation of Urban Areas Using Road Networks: Nicholas Jing Yuan Yu Zheng Xing XieDocument5 pagesSegmentation of Urban Areas Using Road Networks: Nicholas Jing Yuan Yu Zheng Xing XieMuhammad FarhanNo ratings yet
- Vision-Based Extrapolation of Road Lane Lines inDocument4 pagesVision-Based Extrapolation of Road Lane Lines invenkat pNo ratings yet
- ECE 533 Course Project: Vision-Based Lane Detection Using Hough TransformDocument12 pagesECE 533 Course Project: Vision-Based Lane Detection Using Hough TransformpravinNo ratings yet
- Learning Lane Graph Representations For Motion ForecastingDocument17 pagesLearning Lane Graph Representations For Motion ForecastingApoorva AnkadNo ratings yet
- Convolutional Neural Network For Road Network Detections Using Sentinel 2ADocument6 pagesConvolutional Neural Network For Road Network Detections Using Sentinel 2AInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Lanelet2: A High-Definition Map Framework For The Future of Automated DrivingDocument8 pagesLanelet2: A High-Definition Map Framework For The Future of Automated DrivingJEICK HINCAPIE BARRERANo ratings yet
- A Methodology For Generating Service Areas That Accounts For Linear BarriersDocument22 pagesA Methodology For Generating Service Areas That Accounts For Linear BarriersAbdul RahmatNo ratings yet
- Remote Sensing: A Real Time Localization System For Vehicles Using Terrain-Based Time Series Subsequence MatchingDocument18 pagesRemote Sensing: A Real Time Localization System For Vehicles Using Terrain-Based Time Series Subsequence MatchingSeagul PeekNo ratings yet
- Map MatchingDocument32 pagesMap Matchingvarunsingh214761No ratings yet
- DTM HakimDocument6 pagesDTM HakimAbdulHakimSallehNo ratings yet
- Iros 09 YwseoDocument6 pagesIros 09 Ywseokirt wirk skythomasNo ratings yet
- Ijgi 08 00409 PDFDocument24 pagesIjgi 08 00409 PDFilo halidNo ratings yet
- Isprs Archives XLI B3 567 2016Document8 pagesIsprs Archives XLI B3 567 2016henri joel jrNo ratings yet
- A Framework For Road Change Detection and Map UpdatingDocument6 pagesA Framework For Road Change Detection and Map UpdatingMochtar SulaimanNo ratings yet
- Contour Lines Extraction and Reconstruction From Topographic MapsDocument12 pagesContour Lines Extraction and Reconstruction From Topographic MapsUbiquitous Computing and Communication JournalNo ratings yet
- Iceans Paper 3-A Simplified Traffic Sign Detection and Recognition System Using Convolutional Neural NetworksDocument11 pagesIceans Paper 3-A Simplified Traffic Sign Detection and Recognition System Using Convolutional Neural NetworksMUHAMMAD ABUBAKAR SADIQNo ratings yet
- 1 s2.0 S0167739X22003028 MainDocument9 pages1 s2.0 S0167739X22003028 MainErsela ZainNo ratings yet
- Deep TEC for Road Extraction from UAV ImageryDocument19 pagesDeep TEC for Road Extraction from UAV ImageryDaniel Garcia MurilloNo ratings yet
- Fast and Reliable Obstacle Detection and Segmentation For Cross-Country NavigationDocument9 pagesFast and Reliable Obstacle Detection and Segmentation For Cross-Country NavigationRoger SacchelliNo ratings yet
- Routing-Based Map Matching For Extracting Routes From GPS TrajectoriesDocument6 pagesRouting-Based Map Matching For Extracting Routes From GPS Trajectoriesjeep82No ratings yet
- Semiautomatic Road Extraction Framework Based On Shape Features and LS-SVM From High-Resolution ImagesDocument12 pagesSemiautomatic Road Extraction Framework Based On Shape Features and LS-SVM From High-Resolution Imagesalex vargheseNo ratings yet
- A Novel Method For Road Intersection Construction From Vehicle Trajectory DataDocument10 pagesA Novel Method For Road Intersection Construction From Vehicle Trajectory DataMNNo ratings yet
- Manto Carlo MethodDocument9 pagesManto Carlo MethodSri KanthNo ratings yet
- Design and Implementation of Hybrid Routing Algorithm For VANETDocument5 pagesDesign and Implementation of Hybrid Routing Algorithm For VANETWARSE JournalsNo ratings yet
- Sat2Graph: Road Graph Extraction Through Graph-Tensor EncodingDocument17 pagesSat2Graph: Road Graph Extraction Through Graph-Tensor EncodingUlrichFranckNo ratings yet
- Accuracy Comparison of Roadway Earthwork Computation Between 3D and 2D MethodsDocument9 pagesAccuracy Comparison of Roadway Earthwork Computation Between 3D and 2D Methodskrystal1911No ratings yet
- Automatic Segmentation and Enhancement of PavementDocument9 pagesAutomatic Segmentation and Enhancement of PavementLuis AlfaroNo ratings yet
- Predicting Speed of Road Using GPS Traces: CS4225 Project ReportDocument18 pagesPredicting Speed of Road Using GPS Traces: CS4225 Project ReportNehaKarunyaNo ratings yet
- Road Network Extraction in Urban Areas by Means of Feature-Level FusionDocument5 pagesRoad Network Extraction in Urban Areas by Means of Feature-Level FusionstalinNo ratings yet
- Traffic Flow Analysis With Multiple Adaptive Vehicle Detectors and Velocity Estimation With Landmark-Based ScanlinesDocument8 pagesTraffic Flow Analysis With Multiple Adaptive Vehicle Detectors and Velocity Estimation With Landmark-Based Scanlineskoushik reddyNo ratings yet
- Traffic Using GPSDocument18 pagesTraffic Using GPSSanjidanahid ShornaNo ratings yet
- Article 1Document8 pagesArticle 1erick_abrahamNo ratings yet
- Quddus 2007Document17 pagesQuddus 2007MehdiHamidiRadNo ratings yet
- Fuzzy Logic Based-Map Matching Algorithm For Vehicle Navigation System in Urban CanyonsDocument12 pagesFuzzy Logic Based-Map Matching Algorithm For Vehicle Navigation System in Urban CanyonsDivya KhandelwalNo ratings yet
- Road Vec NetDocument25 pagesRoad Vec NetYueNo ratings yet
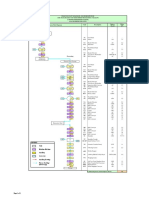
- Process Flow Diagram and Horsepower for TSR 10/20 Grades Crumb Rubber Processing FacilityDocument1 pageProcess Flow Diagram and Horsepower for TSR 10/20 Grades Crumb Rubber Processing Facilityhenri joel jrNo ratings yet
- 1 s2.0 S1569843222000619 MainDocument20 pages1 s2.0 S1569843222000619 Mainhenri joel jrNo ratings yet
- Isprs Archives XLI B3 567 2016Document8 pagesIsprs Archives XLI B3 567 2016henri joel jrNo ratings yet
- 2020GH000310Document21 pages2020GH000310henri joel jrNo ratings yet
- 1 s2.0 S1569843222000358 MainDocument24 pages1 s2.0 S1569843222000358 Mainhenri joel jrNo ratings yet
- Road Network Extraction From Low-Frequency Trajectories Based On A Road Structure-Aware FilterDocument17 pagesRoad Network Extraction From Low-Frequency Trajectories Based On A Road Structure-Aware Filterhenri joel jrNo ratings yet
- Automatic Urban Road Extraction From High Resolution Satellite Data Using Object Based Image Analysis A Fuzzy ClassificaDocument8 pagesAutomatic Urban Road Extraction From High Resolution Satellite Data Using Object Based Image Analysis A Fuzzy Classificahenri joel jrNo ratings yet
- Energy and Buildings: Building Height Estimation Using Google EarthDocument14 pagesEnergy and Buildings: Building Height Estimation Using Google Earthhenri joel jrNo ratings yet
- Information Fusion With Dempster-Shafer Evidence Theory For Software Defect PredictionDocument6 pagesInformation Fusion With Dempster-Shafer Evidence Theory For Software Defect Predictionhenri joel jrNo ratings yet
- Etude D'impact AgbovileDocument10 pagesEtude D'impact Agbovilehenri joel jrNo ratings yet
- Indian Journal Of: EcologyDocument241 pagesIndian Journal Of: Ecologyhenri joel jrNo ratings yet
- HEC RAS Training Manual Workshop 1Document21 pagesHEC RAS Training Manual Workshop 1henri joel jrNo ratings yet
- NZ HEC RAS Manual Workshop 1Document20 pagesNZ HEC RAS Manual Workshop 1satriadelapanduaNo ratings yet
- Dempster-Shafer BPA Based on Fuzzy MembershipDocument9 pagesDempster-Shafer BPA Based on Fuzzy Membershiphenri joel jrNo ratings yet
- IF AC Intelligent Components and Instruments For Control Applications, Annecy France 1997Document5 pagesIF AC Intelligent Components and Instruments For Control Applications, Annecy France 1997henri joel jrNo ratings yet
- Fulltext01 PDFDocument48 pagesFulltext01 PDFhenri joel jrNo ratings yet
- Optimal object association using Dempster-Shafer frameworkDocument12 pagesOptimal object association using Dempster-Shafer frameworkhenri joel jrNo ratings yet
- WHD Thesis PDFDocument195 pagesWHD Thesis PDFhenri joel jrNo ratings yet
- S Hartmann Dempster-Shafer PDFDocument34 pagesS Hartmann Dempster-Shafer PDFhenri joel jrNo ratings yet
- Dempster-Shafer Theory: Introduction, Connections With Rough Sets and Application To ClusteringDocument48 pagesDempster-Shafer Theory: Introduction, Connections With Rough Sets and Application To Clusteringhenri joel jrNo ratings yet
- MSC Thesis Mukami PDFDocument121 pagesMSC Thesis Mukami PDFhenri joel jrNo ratings yet
- WHD Thesis PDFDocument195 pagesWHD Thesis PDFhenri joel jrNo ratings yet
- Fulltext01 PDFDocument48 pagesFulltext01 PDFhenri joel jrNo ratings yet
- S Hartmann Dempster-Shafer PDFDocument34 pagesS Hartmann Dempster-Shafer PDFhenri joel jrNo ratings yet
- Dempster-Shafer Theory: Introduction, Connections With Rough Sets and Application To ClusteringDocument48 pagesDempster-Shafer Theory: Introduction, Connections With Rough Sets and Application To Clusteringhenri joel jrNo ratings yet
- ShaferDocument2 pagesShaferJitender MeenaNo ratings yet
- Dempster-Shafer BPA Based on Fuzzy MembershipDocument9 pagesDempster-Shafer BPA Based on Fuzzy Membershiphenri joel jrNo ratings yet
- Optimal object association using Dempster-Shafer frameworkDocument12 pagesOptimal object association using Dempster-Shafer frameworkhenri joel jrNo ratings yet
- Chapter 3 The Methodology of Economic Research: AidankaneDocument5 pagesChapter 3 The Methodology of Economic Research: AidankaneSrira BanerjeeNo ratings yet
- Student Debate on Population Growth and Environmental DegradationDocument2 pagesStudent Debate on Population Growth and Environmental DegradationRoy CanoyNo ratings yet
- APA 6th Edition Referencing StyleDocument4 pagesAPA 6th Edition Referencing StyleSara ChNo ratings yet
- Self-Designed Experience ProposalDocument7 pagesSelf-Designed Experience Proposalapi-295927147No ratings yet
- Literature Review: Naresh T Chauhan Community Medicine Deptt, Government Medical College, SuratDocument39 pagesLiterature Review: Naresh T Chauhan Community Medicine Deptt, Government Medical College, SuratdrnareshchauhanNo ratings yet
- 3.3. There Is One Error in One of Five Blocks of A...Document2 pages3.3. There Is One Error in One of Five Blocks of A...sabika bashirNo ratings yet
- Topic Guide 2 2018Document14 pagesTopic Guide 2 2018Lila EsauNo ratings yet
- Irm1501 Study GuideDocument55 pagesIrm1501 Study GuideAnitaNo ratings yet
- HK Yes HU NoDocument10 pagesHK Yes HU Noharitriwibowo14No ratings yet
- Lecture 2.bb - Secondary DataDocument8 pagesLecture 2.bb - Secondary DataRodrigo VázquezNo ratings yet
- Research 2 Module 1 Week 1 - 2021Document8 pagesResearch 2 Module 1 Week 1 - 2021Dabymalou Sapu-anNo ratings yet
- Application Letter PT Scci - Salman RamdhaniDocument1 pageApplication Letter PT Scci - Salman RamdhaniRamadhani SalmanNo ratings yet
- Documented Information Guidance: Mohammad ElshahatDocument3 pagesDocumented Information Guidance: Mohammad ElshahatRicardo FoleyNo ratings yet
- Thesis Proposal Electronics Communication EngineeringDocument4 pagesThesis Proposal Electronics Communication Engineeringelizabethallencambridge100% (2)
- Senior Scientist Assay Development Proteomics in San Diego CA Resume Gabriela KorzusDocument2 pagesSenior Scientist Assay Development Proteomics in San Diego CA Resume Gabriela KorzusGabrielaKorzusNo ratings yet
- Product-Oriented Assessment RubricDocument16 pagesProduct-Oriented Assessment RubricLizlie Laosinguan100% (2)
- Study On Perfromance Appraisal System in HPCLDocument12 pagesStudy On Perfromance Appraisal System in HPCLomkinggNo ratings yet
- 7 Steps of Hypothesis TestingDocument3 pages7 Steps of Hypothesis TestingShaira Mae LapazNo ratings yet
- Obstruction. Return of Bowel Sounds - Not Effective To Judges Post Op IleusDocument6 pagesObstruction. Return of Bowel Sounds - Not Effective To Judges Post Op Ileusjustin_saneNo ratings yet
- All Haj Har Sam Gnrs 586 Qi PresentationDocument12 pagesAll Haj Har Sam Gnrs 586 Qi Presentationapi-416448549No ratings yet
- Assessment Task 1 Issue SummaryDocument7 pagesAssessment Task 1 Issue SummaryManuel Pozos HernándezNo ratings yet
- Schwartz. We Make Our Tools and Our Tools Make UsDocument35 pagesSchwartz. We Make Our Tools and Our Tools Make UsJuan MontoyaNo ratings yet
- EPOC Study Designs AboutDocument3 pagesEPOC Study Designs AboutAleCsss123No ratings yet
- CONSUMER BEHAVIOR TITLEDocument63 pagesCONSUMER BEHAVIOR TITLERudrasish BeheraNo ratings yet
- CFS Cloud Implementation in OrganizationsDocument192 pagesCFS Cloud Implementation in OrganizationsDaniela TalmaciuNo ratings yet
- How to Work with Quotient RingsDocument6 pagesHow to Work with Quotient RingsRustin AlexandruNo ratings yet
- Juki Sweing Machine ProjectDocument61 pagesJuki Sweing Machine ProjectApple ComputersNo ratings yet
- EcE Laboratory Borrowing Form TemplateDocument1 pageEcE Laboratory Borrowing Form TemplateAnthony Sazon TolentinoNo ratings yet