You might also like
- JK Water Leaks AllDocument144 pagesJK Water Leaks Allkacos2000100% (5)
- CDT Handbook: For Certification CandidatesDocument15 pagesCDT Handbook: For Certification CandidatesKnot NairNo ratings yet
- ASTM C131/C131M 14: Standard Test Method For Resistance To Degradation of Small-Size Coarse Aggregate by Abrasion and Impact in The Los Angeles MachineDocument5 pagesASTM C131/C131M 14: Standard Test Method For Resistance To Degradation of Small-Size Coarse Aggregate by Abrasion and Impact in The Los Angeles MachineShaheer Ahmad100% (1)
- Movie Project PlanDocument14 pagesMovie Project PlanEris Perfect100% (1)
- 09 - Configuring Cisco ASADocument8 pages09 - Configuring Cisco ASAMorad Alabsy100% (1)
- Road Detection PaperDocument14 pagesRoad Detection Papersaeb2saebNo ratings yet
- Boiler Feed Water PumpDocument7 pagesBoiler Feed Water PumphadijawaidNo ratings yet
- Informed Urban Transport Systems: Classic and Emerging Mobility Methods toward Smart CitiesFrom EverandInformed Urban Transport Systems: Classic and Emerging Mobility Methods toward Smart CitiesNo ratings yet
- A Framework For Road Change Detection and Map UpdatingDocument6 pagesA Framework For Road Change Detection and Map UpdatingMochtar SulaimanNo ratings yet
- Roadtracer: Automatic Extraction of Road Networks From Aerial ImagesDocument9 pagesRoadtracer: Automatic Extraction of Road Networks From Aerial Imageshenri joel jrNo ratings yet
- Sujatha-Selvathi2015 Article ConnectedComponent-basedTechniDocument16 pagesSujatha-Selvathi2015 Article ConnectedComponent-basedTechniJoão JúniorNo ratings yet
- Ruas 2017Document256 pagesRuas 2017tek bahadur katuwalNo ratings yet
- Sustainability 11 04511 v2Document19 pagesSustainability 11 04511 v2ravichoprascribdNo ratings yet
- Predicting Speed of Road Using GPS Traces: CS4225 Project ReportDocument18 pagesPredicting Speed of Road Using GPS Traces: CS4225 Project ReportNehaKarunyaNo ratings yet
- A Review of Global Path Planning Methods For Occupancy Grid Maps Regardless of Obstacle DensityDocument30 pagesA Review of Global Path Planning Methods For Occupancy Grid Maps Regardless of Obstacle DensityAbdessamed BelhadjNo ratings yet
- Road Scene Segmentation from Noisy Labels and Color Plane FusionDocument14 pagesRoad Scene Segmentation from Noisy Labels and Color Plane FusioncseteanikoNo ratings yet
- Learning To Detect Roads in High-Resolution Aerial ImagesDocument14 pagesLearning To Detect Roads in High-Resolution Aerial ImagesAlim SheikhNo ratings yet
- Role of GIS in Traffic EngineeringDocument6 pagesRole of GIS in Traffic EngineeringDebasmita Roy ChowdhuryNo ratings yet
- Map Matching For Intelligent Speed AdaptationDocument12 pagesMap Matching For Intelligent Speed Adaptationajainb239No ratings yet
- Paper For Worldcomp-FinalpaperDocument7 pagesPaper For Worldcomp-FinalpaperVijaya NatarajanNo ratings yet
- Sat2Graph: Road Graph Extraction Through Graph-Tensor EncodingDocument17 pagesSat2Graph: Road Graph Extraction Through Graph-Tensor EncodingUlrichFranckNo ratings yet
- A Contribution To Solving The Travelling Salesman Problem Using Ant Colony Optimization and Web Mapping PlatformsDocument7 pagesA Contribution To Solving The Travelling Salesman Problem Using Ant Colony Optimization and Web Mapping PlatformsZougoulougouNo ratings yet
- Sensors: Traffic Estimation For Large Urban Road Network With High Missing Data RatioDocument16 pagesSensors: Traffic Estimation For Large Urban Road Network With High Missing Data RatioJokosystems NigeriaNo ratings yet
- Smooth Path Planning in Constrained Environments: Martin Rufli Dave Ferguson Roland SiegwartDocument6 pagesSmooth Path Planning in Constrained Environments: Martin Rufli Dave Ferguson Roland SiegwartTales MarquesNo ratings yet
- New Method FR Haul Road Design in Open PitDocument20 pagesNew Method FR Haul Road Design in Open PitFandy saputraNo ratings yet
- 3D Localization, Mapping and Path Planning For Search and Rescue OperationsDocument3 pages3D Localization, Mapping and Path Planning For Search and Rescue OperationsbookeepaNo ratings yet
- Final ManuscriptDocument20 pagesFinal ManuscriptDharnish Raja.JNo ratings yet
- Road Network Extraction in Urban Areas by Means of Feature-Level FusionDocument5 pagesRoad Network Extraction in Urban Areas by Means of Feature-Level FusionstalinNo ratings yet
- 5435-Article Text-8660-1-10-20200511Document8 pages5435-Article Text-8660-1-10-20200511Dipan MehtaNo ratings yet
- Remote Sensing: A Real Time Localization System For Vehicles Using Terrain-Based Time Series Subsequence MatchingDocument18 pagesRemote Sensing: A Real Time Localization System For Vehicles Using Terrain-Based Time Series Subsequence MatchingSeagul PeekNo ratings yet
- A Methodology For Generating Service Areas That Accounts For Linear BarriersDocument22 pagesA Methodology For Generating Service Areas That Accounts For Linear BarriersAbdul RahmatNo ratings yet
- Algorithms For Estimating Bus Arrival Times Using GPS DataDocument6 pagesAlgorithms For Estimating Bus Arrival Times Using GPS DataBruno FreitasNo ratings yet
- Panos Michalopoulos John Hourdos University of Minnesota - Civil Engineering Department February 28 2007Document46 pagesPanos Michalopoulos John Hourdos University of Minnesota - Civil Engineering Department February 28 2007Nadeem AhmadNo ratings yet
- Efficiently Computing Optimal Paths of Arbitrary Clearance from Navigation MeshesDocument10 pagesEfficiently Computing Optimal Paths of Arbitrary Clearance from Navigation MeshesJoren JoestarNo ratings yet
- Mobile Robot Monocular Vision Navigation Based On Road Region and Boundary EstimationDocument8 pagesMobile Robot Monocular Vision Navigation Based On Road Region and Boundary EstimationArtur Faby Jimenez BonillaNo ratings yet
- Multi-Robot Mapping and Navigation Using Topological FeaturesDocument6 pagesMulti-Robot Mapping and Navigation Using Topological FeaturesSiddharth UNo ratings yet
- Segmentation of Urban Areas Using Road Networks: Nicholas Jing Yuan Yu Zheng Xing XieDocument5 pagesSegmentation of Urban Areas Using Road Networks: Nicholas Jing Yuan Yu Zheng Xing XieMuhammad FarhanNo ratings yet
- Deep TEC for Road Extraction from UAV ImageryDocument19 pagesDeep TEC for Road Extraction from UAV ImageryDaniel Garcia MurilloNo ratings yet
- 2020 - Connolly - High Speed Railway Ground Dynamics A Multi-Model AnalysisDocument25 pages2020 - Connolly - High Speed Railway Ground Dynamics A Multi-Model Analysissulongge98No ratings yet
- A Real-Time Algorithm For Mobile Robot Mapping With Applications To Multi-Robot and 3D MappingDocument8 pagesA Real-Time Algorithm For Mobile Robot Mapping With Applications To Multi-Robot and 3D MappingjayachandradbzNo ratings yet
- Semiautomatic Road Extraction Framework Based On Shape Features and LS-SVM From High-Resolution ImagesDocument12 pagesSemiautomatic Road Extraction Framework Based On Shape Features and LS-SVM From High-Resolution Imagesalex vargheseNo ratings yet
- ECE 533 Course Project: Vision-Based Lane Detection Using Hough TransformDocument12 pagesECE 533 Course Project: Vision-Based Lane Detection Using Hough TransformpravinNo ratings yet
- Proposing New Path-planning Metrics for Operating Rovers on MarsDocument11 pagesProposing New Path-planning Metrics for Operating Rovers on MarsMAriaNo ratings yet
- Kim End-To-End Ego Lane CVPR 2017 PaperDocument9 pagesKim End-To-End Ego Lane CVPR 2017 PaperXiaotian LiuNo ratings yet
- Automatic Segmentation and Enhancement of PavementDocument9 pagesAutomatic Segmentation and Enhancement of PavementLuis AlfaroNo ratings yet
- Application of Image Processing To Measure Road Distresses: January 2008Document8 pagesApplication of Image Processing To Measure Road Distresses: January 2008afshine123No ratings yet
- Hiti Graph Model of Topographical Road Maps in Navigation SystemsDocument9 pagesHiti Graph Model of Topographical Road Maps in Navigation SystemsJacco EerlandNo ratings yet
- Research_on_road_extraction_from_high-resolution_remote_sensing_images_based_on_improved_UNetDocument10 pagesResearch_on_road_extraction_from_high-resolution_remote_sensing_images_based_on_improved_UNetBharath RNo ratings yet
- Multi-Robot Informative Path Planning Using A Leader-Follower ArchitectureDocument7 pagesMulti-Robot Informative Path Planning Using A Leader-Follower Architecturegfdsal878No ratings yet
- Direct Georeferencing 3D Points Cloud Map Based On SLAM and Robot Operating SystemDocument5 pagesDirect Georeferencing 3D Points Cloud Map Based On SLAM and Robot Operating SystemFraj HarizNo ratings yet
- Base PaperDocument12 pagesBase PaperRenji RajNo ratings yet
- Hough Detec LineDocument6 pagesHough Detec Linenguyễn hiềnNo ratings yet
- Isprs Archives XLI B3 567 2016Document8 pagesIsprs Archives XLI B3 567 2016henri joel jrNo ratings yet
- Fast and Reliable Obstacle Detection and Segmentation For Cross-Country NavigationDocument9 pagesFast and Reliable Obstacle Detection and Segmentation For Cross-Country NavigationRoger SacchelliNo ratings yet
- An Evaluation of Inter-Vehicle Ad Hoc Networks Based On Realistic Vehicular TracesDocument12 pagesAn Evaluation of Inter-Vehicle Ad Hoc Networks Based On Realistic Vehicular TracesAsma BenTiba Epouse KribiNo ratings yet
- cognitive frameworkDocument17 pagescognitive frameworkHEPZIBAH J CSE-PG2020No ratings yet
- Ptam PaperDocument10 pagesPtam PaperRyottNo ratings yet
- Suma++: Efficient Lidar-Based Semantic SlamDocument8 pagesSuma++: Efficient Lidar-Based Semantic SlamIgnacio VizzoNo ratings yet
- Quddus 2007Document17 pagesQuddus 2007MehdiHamidiRadNo ratings yet
- SemiAutomatic Extraction of Geometric Elements of Curved Ramps From Google Earth ImagesSustainability SwitzerlandDocument16 pagesSemiAutomatic Extraction of Geometric Elements of Curved Ramps From Google Earth ImagesSustainability SwitzerlandBruce ChavezNo ratings yet
- Traffic Flow Analysis With Multiple Adaptive Vehicle Detectors and Velocity Estimation With Landmark-Based ScanlinesDocument8 pagesTraffic Flow Analysis With Multiple Adaptive Vehicle Detectors and Velocity Estimation With Landmark-Based Scanlineskoushik reddyNo ratings yet
- Design and Implementation of Hybrid Routing Algorithm For VANETDocument5 pagesDesign and Implementation of Hybrid Routing Algorithm For VANETWARSE JournalsNo ratings yet
- Zoning and Network BuildingDocument5 pagesZoning and Network Buildingeliasrhd1No ratings yet
- Traffic Pattern Analysis From GPS Data: A Case Study of Dhaka CityDocument6 pagesTraffic Pattern Analysis From GPS Data: A Case Study of Dhaka CityheimdhallNo ratings yet
- Feature Object Detection On The Urban Road Surface by The Application of Three Line Scanner ImageryDocument6 pagesFeature Object Detection On The Urban Road Surface by The Application of Three Line Scanner Imagerybhavin_kapoorNo ratings yet
- Neues verkehrswissenschaftliches Journal - Ausgabe 16: Capacity Research in Urban Rail-Bound Transportation with Special Consideration of Mixed TrafficFrom EverandNeues verkehrswissenschaftliches Journal - Ausgabe 16: Capacity Research in Urban Rail-Bound Transportation with Special Consideration of Mixed TrafficNo ratings yet
- 1 s2.0 S1569843222000358 MainDocument24 pages1 s2.0 S1569843222000358 Mainhenri joel jrNo ratings yet
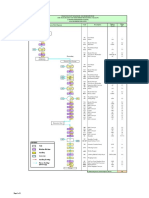
- Process Flow Diagram and Horsepower for TSR 10/20 Grades Crumb Rubber Processing FacilityDocument1 pageProcess Flow Diagram and Horsepower for TSR 10/20 Grades Crumb Rubber Processing Facilityhenri joel jrNo ratings yet
- 2020GH000310Document21 pages2020GH000310henri joel jrNo ratings yet
- Road Network Extraction From Low-Frequency Trajectories Based On A Road Structure-Aware FilterDocument17 pagesRoad Network Extraction From Low-Frequency Trajectories Based On A Road Structure-Aware Filterhenri joel jrNo ratings yet
- IF AC Intelligent Components and Instruments For Control Applications, Annecy France 1997Document5 pagesIF AC Intelligent Components and Instruments For Control Applications, Annecy France 1997henri joel jrNo ratings yet
- HEC RAS Training Manual Workshop 1Document21 pagesHEC RAS Training Manual Workshop 1henri joel jrNo ratings yet
- 1 s2.0 S1569843222000619 MainDocument20 pages1 s2.0 S1569843222000619 Mainhenri joel jrNo ratings yet
- Information Fusion With Dempster-Shafer Evidence Theory For Software Defect PredictionDocument6 pagesInformation Fusion With Dempster-Shafer Evidence Theory For Software Defect Predictionhenri joel jrNo ratings yet
- Isprs Archives XLI B3 567 2016Document8 pagesIsprs Archives XLI B3 567 2016henri joel jrNo ratings yet
- Indian Journal Of: EcologyDocument241 pagesIndian Journal Of: Ecologyhenri joel jrNo ratings yet
- ShaferDocument2 pagesShaferJitender MeenaNo ratings yet
- Energy and Buildings: Building Height Estimation Using Google EarthDocument14 pagesEnergy and Buildings: Building Height Estimation Using Google Earthhenri joel jrNo ratings yet
- NZ HEC RAS Manual Workshop 1Document20 pagesNZ HEC RAS Manual Workshop 1satriadelapanduaNo ratings yet
- Automatic Urban Road Extraction From High Resolution Satellite Data Using Object Based Image Analysis A Fuzzy ClassificaDocument8 pagesAutomatic Urban Road Extraction From High Resolution Satellite Data Using Object Based Image Analysis A Fuzzy Classificahenri joel jrNo ratings yet
- S Hartmann Dempster-Shafer PDFDocument34 pagesS Hartmann Dempster-Shafer PDFhenri joel jrNo ratings yet
- Etude D'impact AgbovileDocument10 pagesEtude D'impact Agbovilehenri joel jrNo ratings yet
- WHD Thesis PDFDocument195 pagesWHD Thesis PDFhenri joel jrNo ratings yet
- Dempster-Shafer BPA Based on Fuzzy MembershipDocument9 pagesDempster-Shafer BPA Based on Fuzzy Membershiphenri joel jrNo ratings yet
- Optimal object association using Dempster-Shafer frameworkDocument12 pagesOptimal object association using Dempster-Shafer frameworkhenri joel jrNo ratings yet
- Fulltext01 PDFDocument48 pagesFulltext01 PDFhenri joel jrNo ratings yet
- MSC Thesis Mukami PDFDocument121 pagesMSC Thesis Mukami PDFhenri joel jrNo ratings yet
- Dempster-Shafer Theory: Introduction, Connections With Rough Sets and Application To ClusteringDocument48 pagesDempster-Shafer Theory: Introduction, Connections With Rough Sets and Application To Clusteringhenri joel jrNo ratings yet
- Fulltext01 PDFDocument48 pagesFulltext01 PDFhenri joel jrNo ratings yet
- WHD Thesis PDFDocument195 pagesWHD Thesis PDFhenri joel jrNo ratings yet
- Dempster-Shafer Theory: Introduction, Connections With Rough Sets and Application To ClusteringDocument48 pagesDempster-Shafer Theory: Introduction, Connections With Rough Sets and Application To Clusteringhenri joel jrNo ratings yet
- Dempster-Shafer BPA Based on Fuzzy MembershipDocument9 pagesDempster-Shafer BPA Based on Fuzzy Membershiphenri joel jrNo ratings yet
- Optimal object association using Dempster-Shafer frameworkDocument12 pagesOptimal object association using Dempster-Shafer frameworkhenri joel jrNo ratings yet
- S Hartmann Dempster-Shafer PDFDocument34 pagesS Hartmann Dempster-Shafer PDFhenri joel jrNo ratings yet
- GIGABYTE GA-H81M-DS2 Mainboard ManualDocument32 pagesGIGABYTE GA-H81M-DS2 Mainboard Manualcr33pz1llaNo ratings yet
- Lab ReportDocument3 pagesLab ReportasdadadNo ratings yet
- Uncovering Misconceptions in GNSS Precise Point PositioningDocument10 pagesUncovering Misconceptions in GNSS Precise Point PositioningChethan Kumar RENo ratings yet
- Surface Vehicle Standard: Rev. AUG2005Document58 pagesSurface Vehicle Standard: Rev. AUG2005Leonardo Gonçalves GomideNo ratings yet
- Faculty of Engineering, UNIMASDocument4 pagesFaculty of Engineering, UNIMASjohnNo ratings yet
- Introduction To Qualitative Research MethodsDocument8 pagesIntroduction To Qualitative Research MethodsBast JordNo ratings yet
- Release Mode Bundle ErrorDocument11 pagesRelease Mode Bundle ErrorRaman deepNo ratings yet
- F2022C00010Document152 pagesF2022C00010CNo ratings yet
- Parts Shutter CompletoDocument158 pagesParts Shutter CompletofaelofNo ratings yet
- E2.3 - CPSC 210 - PrairieLearnDocument3 pagesE2.3 - CPSC 210 - PrairieLearnErainne Yuting DaiNo ratings yet
- Valve Material Specification General Notes: Annexure-I (To VMS)Document5 pagesValve Material Specification General Notes: Annexure-I (To VMS)sabareeshNo ratings yet
- Final AssignmentDocument4 pagesFinal AssignmentAssignment HandleNo ratings yet
- VB Programs BCA 4th SemDocument58 pagesVB Programs BCA 4th SemadarshNo ratings yet
- V2 Progression Pathways by CS IT and DL-with-CT-refs PDFDocument1 pageV2 Progression Pathways by CS IT and DL-with-CT-refs PDFsramsahaNo ratings yet
- Industrial Metal Detector: Operator ManualDocument40 pagesIndustrial Metal Detector: Operator ManualINMETRO SACNo ratings yet
- Bibler Tempest SetupDocument3 pagesBibler Tempest SetupmriffaiNo ratings yet
- Models - Heat.conical Dielectric ProbeDocument28 pagesModels - Heat.conical Dielectric ProbeDenis JaissonNo ratings yet
- Operation Research First Unit Notes For Bba 4th SemDocument16 pagesOperation Research First Unit Notes For Bba 4th SemRavi Patel78% (9)
- AutoLaser UM enDocument151 pagesAutoLaser UM enCristian LopezNo ratings yet
- History of Computer: Basic Computing Periods: Week 3 Living in The IT Era Maria Michelle VinegasDocument41 pagesHistory of Computer: Basic Computing Periods: Week 3 Living in The IT Era Maria Michelle VinegasMary Ianne Therese GumabongNo ratings yet
- Advantages of Planning (100 Words)Document3 pagesAdvantages of Planning (100 Words)Maria Angelika AgarpaoNo ratings yet
- ICT AssignmentDocument8 pagesICT Assignmentlij yoNo ratings yet
- Elec Cold Test - Smdb-Roof AtkinsDocument2 pagesElec Cold Test - Smdb-Roof AtkinsNabilBouabanaNo ratings yet
- Catia v5 6r2014 For Engineers and Designers PDF FreeDocument2 pagesCatia v5 6r2014 For Engineers and Designers PDF FreeJasmeet SinghNo ratings yet