You might also like
- Unit II Chapter 9: Vibration Control: UE15ME352: Mechanical Vibrations Question Bank: Partial SolutionsDocument11 pagesUnit II Chapter 9: Vibration Control: UE15ME352: Mechanical Vibrations Question Bank: Partial SolutionsNABIL HUSSAINNo ratings yet
- Reinforced Concrete Design Fourth Edition by W. H. Mosley and J. H. BungeyDocument403 pagesReinforced Concrete Design Fourth Edition by W. H. Mosley and J. H. BungeyNikunj Dwivedi100% (6)
- (Energy Wind) Andreas Baumgart - Models For Wind TurbinesDocument71 pages(Energy Wind) Andreas Baumgart - Models For Wind Turbinestaner56No ratings yet
- 1887 3249402-Renewable and Sustainable Energy Reviews 144 2021 110880Document23 pages1887 3249402-Renewable and Sustainable Energy Reviews 144 2021 110880rotimi olalekan fataiNo ratings yet
- Active Tensegrity Structures With SlidinDocument8 pagesActive Tensegrity Structures With SlidinDoan Nguyen VanNo ratings yet
- Cui 2018Document17 pagesCui 2018Anonymous sQGjGjo7oNo ratings yet
- SdarticleDocument9 pagesSdarticleBianca ParvNo ratings yet
- ECCOMAS Paper FinalDocument13 pagesECCOMAS Paper FinalsarhlisahraNo ratings yet
- Aeroelastic Analysis of A Floating Offshore Wind Turbine in Platform-Induced Surge Motion Using A Fully Coupled CFD-MBD MethodDocument42 pagesAeroelastic Analysis of A Floating Offshore Wind Turbine in Platform-Induced Surge Motion Using A Fully Coupled CFD-MBD MethodGerry RyanNo ratings yet
- Energies 13 02108Document21 pagesEnergies 13 02108eqNo ratings yet
- InTech-Structural Analysis of Complex Wind Turbine Blades Flexo Torsional Vibrational ModesDocument28 pagesInTech-Structural Analysis of Complex Wind Turbine Blades Flexo Torsional Vibrational ModesMahmoud MoussaNo ratings yet
- Michielsen - 2012 - Steady-State Dynamics of A 3D Tensegrity Structure Simulations and ExperimentsDocument16 pagesMichielsen - 2012 - Steady-State Dynamics of A 3D Tensegrity Structure Simulations and Experimentsdiogorossot_85125119No ratings yet
- A Model For Yawing Dynamic Optimization of A Wind Turbine StructureDocument9 pagesA Model For Yawing Dynamic Optimization of A Wind Turbine StructureRevan TaeNo ratings yet
- VMD CatDocument13 pagesVMD CatvedantvivekhireNo ratings yet
- Collapse Load Analysis of Yield-Line ElementsDocument7 pagesCollapse Load Analysis of Yield-Line ElementsAlaa Elsisi100% (1)
- International Journal of Engineering Science: Wenbin Yu, Dewey H. Hodges, Jimmy C. HoDocument25 pagesInternational Journal of Engineering Science: Wenbin Yu, Dewey H. Hodges, Jimmy C. HosquijanNo ratings yet
- J Mechmachtheory 2021 104291Document14 pagesJ Mechmachtheory 2021 104291luuthuanNo ratings yet
- Seismic Protection of RC Frames Using Friction Dampers: A.K. SinhaDocument11 pagesSeismic Protection of RC Frames Using Friction Dampers: A.K. SinhaIAEME PublicationNo ratings yet
- Engineering Structures: M.F. Huang, K.T. Tse, C.M. Chan, K.C.S. Kwok, P.A. Hitchcock, W.J. Lou, G. LiDocument11 pagesEngineering Structures: M.F. Huang, K.T. Tse, C.M. Chan, K.C.S. Kwok, P.A. Hitchcock, W.J. Lou, G. LiBianca ParvNo ratings yet
- Hydroelastic Analysis of Flexible Floating Interconnected Structures - 2Document16 pagesHydroelastic Analysis of Flexible Floating Interconnected Structures - 2Wael Fawzy MohamedNo ratings yet
- Analysis of The Blade Element Momentum Theory: Jeremy Ledoux, Sebastián Riffo, Julien SalomonDocument29 pagesAnalysis of The Blade Element Momentum Theory: Jeremy Ledoux, Sebastián Riffo, Julien Salomonsathish22No ratings yet
- Stability Comparison of Different Controllers For Hydraulic Turbine Fractional Order Interval Parameter Time-Delay SystemDocument16 pagesStability Comparison of Different Controllers For Hydraulic Turbine Fractional Order Interval Parameter Time-Delay SystemClaudia SabrinaNo ratings yet
- FSI PaperDocument10 pagesFSI PaperHasan AdelNo ratings yet
- Sistem Kerja Kinetic FasadDocument9 pagesSistem Kerja Kinetic FasadPii Ishak HermanNo ratings yet
- 1 s2.0 S0263822319308724 MainDocument15 pages1 s2.0 S0263822319308724 MainJean Carlos Mota SilvaNo ratings yet
- Morphing Wing StructuresDocument7 pagesMorphing Wing StructuresManoj RamNo ratings yet
- Control Engineering Practice: Michael Erhard, Hans StrauchDocument14 pagesControl Engineering Practice: Michael Erhard, Hans StrauchSka dooshNo ratings yet
- Recent Progress in Aerodynamics For Aeroelastic AnalysisDocument6 pagesRecent Progress in Aerodynamics For Aeroelastic AnalysisIJRASETPublications100% (1)
- A Modified Damping Model of Vector Form Intrinsic Finite Element Method For High-Speed Spiral Bevel Gear Dynamic Characteristics AnalysisDocument11 pagesA Modified Damping Model of Vector Form Intrinsic Finite Element Method For High-Speed Spiral Bevel Gear Dynamic Characteristics AnalysisNgoc Thang NguyenNo ratings yet
- Li 2017Document15 pagesLi 2017l4dy3v1lNo ratings yet
- A Fem-BemDocument23 pagesA Fem-BemAleksa MarjanovićNo ratings yet
- Multibody Dynamics PaperDocument10 pagesMultibody Dynamics PaperMahmoud MoussaNo ratings yet
- A Novel Design of Planar High Compliance Joint in Variable S - 2022 - MechanismDocument17 pagesA Novel Design of Planar High Compliance Joint in Variable S - 2022 - MechanismOscar GomezNo ratings yet
- Energy: Abbas Ebrahimi, Mahmood SekandariDocument15 pagesEnergy: Abbas Ebrahimi, Mahmood Sekandarimohdsolihat1No ratings yet
- Lift and Drag Forces Calculation From 2D Airfoil Data of Wind Turbine BladesDocument25 pagesLift and Drag Forces Calculation From 2D Airfoil Data of Wind Turbine BladesffontanaNo ratings yet
- Wind Turbine Modeling Using The Bond Graph: Tore Bakka and Hamid Reza KarimiDocument6 pagesWind Turbine Modeling Using The Bond Graph: Tore Bakka and Hamid Reza KarimiEdisson VillaNo ratings yet
- Application of Finite Element Method in Structural DesignDocument16 pagesApplication of Finite Element Method in Structural DesignAnil KadbhaneNo ratings yet
- 2021-Uncertainty Modeling in Reliability Analysis of Floating Wind TurbineDocument21 pages2021-Uncertainty Modeling in Reliability Analysis of Floating Wind TurbineKala J PrasadNo ratings yet
- 1 s2.0 S0020768301000269 Main PDFDocument28 pages1 s2.0 S0020768301000269 Main PDFsundaramaks saravana muruganNo ratings yet
- Inter Achieve 2004 Jinkoo (EESD)Document20 pagesInter Achieve 2004 Jinkoo (EESD)bristiNo ratings yet
- Flexible Arm On ShaftDocument26 pagesFlexible Arm On ShaftCleves AxiomaNo ratings yet
- Optimal Topology and Geometry For Controllable Tensegrity Systems by Jager, Masic, SkeltonDocument6 pagesOptimal Topology and Geometry For Controllable Tensegrity Systems by Jager, Masic, SkeltonTensegrity WikiNo ratings yet
- Time History Analysis of Frame Structure Systems by State-Space Representation MethodDocument8 pagesTime History Analysis of Frame Structure Systems by State-Space Representation MethodPraveena RaoNo ratings yet
- Guruswamy G A Review of Numerical Fluids Structures Interface Methods For Computations Using High-Fidelity EquationsDocument11 pagesGuruswamy G A Review of Numerical Fluids Structures Interface Methods For Computations Using High-Fidelity EquationsBrenno Moura MouraNo ratings yet
- Applmech 02 00009Document12 pagesApplmech 02 00009SubhasreeNo ratings yet
- 2019 Goyal and Skelton - Tensegrity System Dynamics With Rigid Bars and Massive StringsDocument26 pages2019 Goyal and Skelton - Tensegrity System Dynamics With Rigid Bars and Massive StringsDaniel MartinsNo ratings yet
- NarsipurPomeroySelig 2012Document18 pagesNarsipurPomeroySelig 2012idora27No ratings yet
- 11 Asme-Detc LeishmanDocument11 pages11 Asme-Detc LeishmanToufique YalsangikarNo ratings yet
- Review of Aeroelasticity For Wind Turbine Current Status, Research Focus and Future PerspectivesDocument16 pagesReview of Aeroelasticity For Wind Turbine Current Status, Research Focus and Future PerspectivesclaralisieNo ratings yet
- 2021 Influence of Inertia and Aspect Ratio On The Torsional Galloping of Single-Axis Solar TrackersDocument9 pages2021 Influence of Inertia and Aspect Ratio On The Torsional Galloping of Single-Axis Solar TrackersYanfei ZhuNo ratings yet
- Vibration 04 00020 v2Document13 pagesVibration 04 00020 v2uma.bhuvanNo ratings yet
- H Aa Madsen 2007 J. Phys. Conf. Ser. 75 012016Document12 pagesH Aa Madsen 2007 J. Phys. Conf. Ser. 75 012016cepheid_luNo ratings yet
- Energies 12 00659 PDFDocument28 pagesEnergies 12 00659 PDFPonniyin SelvanNo ratings yet
- Structural Optimization Procedure of A Composite Wind Turbine Blade For Reducing Both Material Cost and Blade WeightDocument20 pagesStructural Optimization Procedure of A Composite Wind Turbine Blade For Reducing Both Material Cost and Blade WeightNasser ShelilNo ratings yet
- A - Simplified - Flexible - Multibody - Dynamics - For - A - Main Landing GearDocument11 pagesA - Simplified - Flexible - Multibody - Dynamics - For - A - Main Landing GearSoma VargaNo ratings yet
- 17.perumal, Zhou - 2021 - Axisymmetric Jet Manipulation Using Multiple Unsteady Minijets-AnnotatedDocument26 pages17.perumal, Zhou - 2021 - Axisymmetric Jet Manipulation Using Multiple Unsteady Minijets-Annotatedjinuchandran09No ratings yet
- Computers and Structures: C. Martín Saravia, Sebastián P. Machado, Víctor H. CortínezDocument15 pagesComputers and Structures: C. Martín Saravia, Sebastián P. Machado, Víctor H. CortínezKhalil DeghoumNo ratings yet
- 1-Saeroelasticdesignoptimizationofthin-Walledsubsonicwings Against DivergenceDocument9 pages1-Saeroelasticdesignoptimizationofthin-Walledsubsonicwings Against Divergencerahman10191871No ratings yet
- Syllabus UE15ME352 Mechanical Vibrations 2017-18Document2 pagesSyllabus UE15ME352 Mechanical Vibrations 2017-18NABIL HUSSAINNo ratings yet
- Study of Abrasion Wear and Affecting Wear RateDocument8 pagesStudy of Abrasion Wear and Affecting Wear RateNABIL HUSSAINNo ratings yet
- New Doc 2018-04-06Document4 pagesNew Doc 2018-04-06NABIL HUSSAINNo ratings yet
- Nanoindentation Studies of Materials: Materials Physics. With High-Resolution Load-Displacement Data, DiscreteDocument11 pagesNanoindentation Studies of Materials: Materials Physics. With High-Resolution Load-Displacement Data, DiscreteNABIL HUSSAINNo ratings yet
- JSW Steel LTD, Vijayanagar Works.: Gets Campus InstructionsDocument1 pageJSW Steel LTD, Vijayanagar Works.: Gets Campus InstructionsNABIL HUSSAINNo ratings yet
- Unit 5 Trailer Compound Pendulum PDFDocument15 pagesUnit 5 Trailer Compound Pendulum PDFNABIL HUSSAINNo ratings yet
- Development of Surface Coatings For Wear Resistant ApplicationsDocument1 pageDevelopment of Surface Coatings For Wear Resistant ApplicationsNABIL HUSSAINNo ratings yet
- Cost Estimation of Plastic Injection Products ThroDocument8 pagesCost Estimation of Plastic Injection Products ThroNABIL HUSSAINNo ratings yet
- Fem Assignment-1Document1 pageFem Assignment-1NABIL HUSSAINNo ratings yet
- Analytical AccDocument1 pageAnalytical AccNABIL HUSSAINNo ratings yet
- TiN TiC WearDocument13 pagesTiN TiC WearNABIL HUSSAINNo ratings yet
- During Transient Events.: ArticleDocument27 pagesDuring Transient Events.: ArticleNABIL HUSSAINNo ratings yet
- Initial StudyDocument2 pagesInitial StudyNABIL HUSSAINNo ratings yet
- Accommodation Booking Form1 PDFDocument6 pagesAccommodation Booking Form1 PDFNABIL HUSSAINNo ratings yet
- All Study Materials-SSC JE ISRO T.A PDFDocument5 pagesAll Study Materials-SSC JE ISRO T.A PDFNABIL HUSSAINNo ratings yet
- Pes University: Office of The Controller of ExaminationsDocument5 pagesPes University: Office of The Controller of ExaminationsNABIL HUSSAINNo ratings yet
- FSA Department UDL Lesson Plan FormatDocument4 pagesFSA Department UDL Lesson Plan Formatapi-623580840No ratings yet
- Leica NA700 LevelDocument10 pagesLeica NA700 Levelbbutros_317684077No ratings yet
- IMPORTANT MCQ-Heat Transfer 1 - WWW - ALLEXAMREVIEW.COM - PDFDocument19 pagesIMPORTANT MCQ-Heat Transfer 1 - WWW - ALLEXAMREVIEW.COM - PDFRobert Michael CorpusNo ratings yet
- Problems: 7.1 Through 7.4Document4 pagesProblems: 7.1 Through 7.4GertaNo ratings yet
- 01 3D Abutment Foundation PileDocument28 pages01 3D Abutment Foundation PileAhmed RamadanNo ratings yet
- Tutorial 1Document2 pagesTutorial 1Netra PujarNo ratings yet
- Vibrations Second Edition by Balakumar Balachandran Edward B Magrab 385 390-2-760138Document6 pagesVibrations Second Edition by Balakumar Balachandran Edward B Magrab 385 390-2-760138Tomás TorresNo ratings yet
- Historical Development of The AtomDocument23 pagesHistorical Development of The AtomAdrian John Manaloto100% (1)
- Postbuckling Analysis of Columns Resting On An Elastic FoundationDocument10 pagesPostbuckling Analysis of Columns Resting On An Elastic FoundationIrani GonçalvesNo ratings yet
- Permatran-W Model 101K ManuscriptDocument122 pagesPermatran-W Model 101K ManuscriptsqalopezNo ratings yet
- Dash B Shear and Moment 1Document13 pagesDash B Shear and Moment 1Rosmari Aquino PascualNo ratings yet
- Business Mathematics ProblemsDocument51 pagesBusiness Mathematics ProblemsVishu DcpNo ratings yet
- Viva Questions For Highway & Transportation Engineering Lab, CE691Document1 pageViva Questions For Highway & Transportation Engineering Lab, CE691Barijit 6550% (2)
- Exam 2 Review Sol PDFDocument13 pagesExam 2 Review Sol PDFkanurNo ratings yet
- Impact of JetDocument13 pagesImpact of Jetamyrk666No ratings yet
- Web Penetrations Design BookletDocument93 pagesWeb Penetrations Design BookletMinh HoNo ratings yet
- HC-30-L Bom (Listado de Materiales e Instrumentacion)Document8 pagesHC-30-L Bom (Listado de Materiales e Instrumentacion)marcosNo ratings yet
- Keeara Walji - Fri April 30 - Mon April 3 - Exploration Lesson 2Document11 pagesKeeara Walji - Fri April 30 - Mon April 3 - Exploration Lesson 2Keeara WaljiNo ratings yet
- Chapter 2Document48 pagesChapter 2lianne lizardoNo ratings yet
- Operation of The Classical CMOS SchmittDocument5 pagesOperation of The Classical CMOS SchmittAakash ChandraNo ratings yet
- Unit 4 AssignmentsDocument5 pagesUnit 4 AssignmentsbattuarunNo ratings yet
- Astm D2434 PDFDocument6 pagesAstm D2434 PDFRoy Franco Velasco100% (2)
- Hu 2023 J. Phys. Conf. Ser. 2503 012101Document11 pagesHu 2023 J. Phys. Conf. Ser. 2503 012101Amri MoussaNo ratings yet
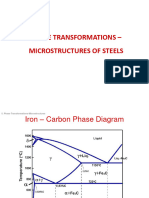
- 05 - MetE 414-Phase Transformations-Microstructures of Steels-Fall 2023Document70 pages05 - MetE 414-Phase Transformations-Microstructures of Steels-Fall 2023egesenturk2000No ratings yet
- Amit Kumar 2Document52 pagesAmit Kumar 2ravi singhNo ratings yet
- 210 CÂU TỪ VỰNG TỪ ĐỀ CÔ DƯƠNG THỊ HƯƠNG .Image.MarkedDocument37 pages210 CÂU TỪ VỰNG TỪ ĐỀ CÔ DƯƠNG THỊ HƯƠNG .Image.MarkedYmelttillodi ForeverinmyheartNo ratings yet
- Me310 HW 3Document3 pagesMe310 HW 3HafizSikandarNo ratings yet
- B Arch Syllabus 2020 15.06.2020 Revised Aug 2020Document91 pagesB Arch Syllabus 2020 15.06.2020 Revised Aug 2020Anushree guptaNo ratings yet