You might also like
- Automatización 4ta Clase, Tipos de Opciones de ControlDocument6 pagesAutomatización 4ta Clase, Tipos de Opciones de Controlivandario17-1No ratings yet
- Embedded Systems and Control Systems': An Open-Loop ControllerDocument5 pagesEmbedded Systems and Control Systems': An Open-Loop Controllermohed_kamalNo ratings yet
- Automatic Controllers & Control ModesDocument74 pagesAutomatic Controllers & Control ModesVishal IyerNo ratings yet
- Unit 16 Instrumentation and Control LO3 & 4 PDFDocument9 pagesUnit 16 Instrumentation and Control LO3 & 4 PDFChathura RanathungaNo ratings yet
- PID ControllerDocument10 pagesPID ControllerFarid HazwanNo ratings yet
- 1 System DynamicsDocument60 pages1 System DynamicsAous HNo ratings yet
- NI Tutorial 3782 enDocument4 pagesNI Tutorial 3782 enpetergoodingNo ratings yet
- Exp - P9 - Pressure ControlDocument9 pagesExp - P9 - Pressure ControlPriyanshu LilhaNo ratings yet
- Pid EeeeDocument28 pagesPid Eeeecyprian obotaNo ratings yet
- Control DerivativoDocument27 pagesControl Derivativouriel cortesNo ratings yet
- Experiment No.1: Now Manually Move The AVS-1 Bar To Control The Flow Through The Valve in To The ContainerDocument16 pagesExperiment No.1: Now Manually Move The AVS-1 Bar To Control The Flow Through The Valve in To The ContainerfahadfiazNo ratings yet
- NI Tutorial 3782 enDocument4 pagesNI Tutorial 3782 enhiperboreoatlantecNo ratings yet
- Process Control and Common TermsDocument210 pagesProcess Control and Common TermsGeorge Markas100% (1)
- L-14 (SS) (Iac) ( (Ee) Nptel)Document10 pagesL-14 (SS) (Iac) ( (Ee) Nptel)Marvin BayanayNo ratings yet
- Report ControlDocument33 pagesReport Controlajwadalfatani100% (5)
- PID Theory ExplainedDocument9 pagesPID Theory ExplainedMansen NsubugaNo ratings yet
- PID ControllerDocument6 pagesPID ControllerpavittarNo ratings yet
- Chapter - 4 Control Configuration 4.1 Pid ControllerDocument8 pagesChapter - 4 Control Configuration 4.1 Pid ControllerMoorthy ManikandanNo ratings yet
- Examining The Fundamentals of PID ControlDocument7 pagesExamining The Fundamentals of PID ControlbariNo ratings yet
- Process ControlDocument2 pagesProcess ControlFakharAbbasNo ratings yet
- Probably The Best Simple PID Tuning Rules in The WorldDocument12 pagesProbably The Best Simple PID Tuning Rules in The WorldKarthi KarthyNo ratings yet
- Chapter 2: Optimum Controller Chapter 2: Optimum Controller Settings Settings GGDocument5 pagesChapter 2: Optimum Controller Chapter 2: Optimum Controller Settings Settings GGLakshmiNo ratings yet
- Example of PID Tuning ExampleDocument31 pagesExample of PID Tuning Examplemhd badhrul bin baharNo ratings yet
- Contro EngineeringDocument29 pagesContro EngineeringNor AshimyNo ratings yet
- Process Control Lab ReportDocument23 pagesProcess Control Lab ReportAnonymous OWdJRM8C100% (1)
- In For MeDocument11 pagesIn For MePenedorado ChichiplateadoNo ratings yet
- PID ControllerDocument16 pagesPID ControllermarraurdersNo ratings yet
- Chapter 1 Introduction Control SysDocument52 pagesChapter 1 Introduction Control SysHaliza MatsaniNo ratings yet
- Pid ControllerDocument20 pagesPid ControllerHarshal InamdarNo ratings yet
- Feedback Exam ReviewerDocument5 pagesFeedback Exam ReviewerShania LoveresNo ratings yet
- PID ControllersDocument58 pagesPID Controllerss12originalNo ratings yet
- Chapter 1Document22 pagesChapter 1Anonymous AFFiZnNo ratings yet
- Introduction To Direct Digital Control Systems: Purpose of This GuideDocument82 pagesIntroduction To Direct Digital Control Systems: Purpose of This GuidekdpmansiNo ratings yet
- Controller TuningDocument5 pagesController TuningSubham SikdarNo ratings yet
- DDCDocument22 pagesDDCBala SrivasNo ratings yet
- Automated Control Resumen Unidd IVDocument23 pagesAutomated Control Resumen Unidd IVRakgnar LodbrokNo ratings yet
- Tuning A PID Controller: Guillermo J. CostaDocument6 pagesTuning A PID Controller: Guillermo J. CostaDeepak RainaNo ratings yet
- Building Management System - BMS 1Document31 pagesBuilding Management System - BMS 1jaffna100% (1)
- Bms For HvacDocument63 pagesBms For HvacWasantha Jayarathna100% (1)
- PID ControlDocument11 pagesPID Controlhd03No ratings yet
- U Tune (Micro Lite)Document8 pagesU Tune (Micro Lite)Laurence MalanumNo ratings yet
- Pid Tuning ClassicalDocument18 pagesPid Tuning ClassicalVo Quang HuyNo ratings yet
- PID Tuning ClassicalDocument10 pagesPID Tuning ClassicalTolga DurudoganNo ratings yet
- What Is PID-Tutorial Overview: Proportional Band Integral DerivativeDocument5 pagesWhat Is PID-Tutorial Overview: Proportional Band Integral Derivativethenu.chandru1042No ratings yet
- Tangent Analysis of A Discreet Step ResponseDocument4 pagesTangent Analysis of A Discreet Step Responseduknow2No ratings yet
- Tarea2 Investigacion-Mcca-190090Document13 pagesTarea2 Investigacion-Mcca-190090Christian MendezNo ratings yet
- Process Instrumentation Terminology Performance CharaDocument12 pagesProcess Instrumentation Terminology Performance CharaPriNo ratings yet
- EE402 RecitationDocument64 pagesEE402 Recitationvignesh0617No ratings yet
- Control Lab Project ReportDocument28 pagesControl Lab Project ReportDanyal QamarNo ratings yet
- Working or Operation of PID ControllerDocument7 pagesWorking or Operation of PID Controllerjohn glenn magnoNo ratings yet
- Objective:: Experiment 9 PID ControllerDocument6 pagesObjective:: Experiment 9 PID ControllerSyamil RahmanNo ratings yet
- PID ControllersDocument9 pagesPID Controllerszs94qjqcx7No ratings yet
- Understanding PID Control and Loop Tuning Fundamentals - Control Engineering PDFDocument1 pageUnderstanding PID Control and Loop Tuning Fundamentals - Control Engineering PDFrafik1995No ratings yet
- EVMS Full Notes PDFDocument78 pagesEVMS Full Notes PDFNaveen DhanurajNo ratings yet
- 2018 Best Practices For PID MacMillanDocument5 pages2018 Best Practices For PID MacMillanAndrew BaileyNo ratings yet
- P, I, D, PI, PD, and PID ControlDocument14 pagesP, I, D, PI, PD, and PID ControlArnav KothiyalNo ratings yet
- Practical Guides to Testing and Commissioning of Mechanical, Electrical and Plumbing (Mep) InstallationsFrom EverandPractical Guides to Testing and Commissioning of Mechanical, Electrical and Plumbing (Mep) InstallationsRating: 3.5 out of 5 stars3.5/5 (3)
- Advanced Temperature Measurement and Control, Second EditionFrom EverandAdvanced Temperature Measurement and Control, Second EditionNo ratings yet
- Arduino Measurements in Science: Advanced Techniques and Data ProjectsFrom EverandArduino Measurements in Science: Advanced Techniques and Data ProjectsNo ratings yet
- Basic Machine Design Situational Problem by Alcorcon 1 1 PDFDocument169 pagesBasic Machine Design Situational Problem by Alcorcon 1 1 PDFVictoria Cantilado100% (5)
- Toroy Experiment 3Document2 pagesToroy Experiment 3anon ggNo ratings yet
- Toroy Experiment 3Document2 pagesToroy Experiment 3anon ggNo ratings yet
- University of CebuDocument2 pagesUniversity of Cebuanon ggNo ratings yet
- University of CebuDocument2 pagesUniversity of Cebuanon ggNo ratings yet
- Toroy Experiment 4Document1 pageToroy Experiment 4anon ggNo ratings yet
- Toroy Experiment 5Document1 pageToroy Experiment 5anon ggNo ratings yet
- Toroyrhastee - Experiment No.6Document5 pagesToroyrhastee - Experiment No.6anon ggNo ratings yet
- Learner Enrollment and Survey Form v8 EnglishDocument5 pagesLearner Enrollment and Survey Form v8 EnglishRhastee P. ToroyNo ratings yet
- Labajo JM Synthesis 5Document5 pagesLabajo JM Synthesis 5anon ggNo ratings yet
- Toroy Experiment 3Document2 pagesToroy Experiment 3anon ggNo ratings yet
- B Additional Practice Problems 1 2 Toroy - RhasteeDocument8 pagesB Additional Practice Problems 1 2 Toroy - RhasteeRhastee P. ToroyNo ratings yet
- Toroyrhastee - Experiment No.6Document5 pagesToroyrhastee - Experiment No.6anon ggNo ratings yet
- 6th Central Pay Commission Salary CalculatorDocument15 pages6th Central Pay Commission Salary Calculatorrakhonde100% (436)
- Project Paw ToroyDocument1 pageProject Paw Toroyanon ggNo ratings yet
- TrizDocument2 pagesTrizRhastee P. ToroyNo ratings yet
- Labajo Obera ToroyDocument4 pagesLabajo Obera ToroyRhastee P. ToroyNo ratings yet
- Toroyrhastee - Experiment No.6Document5 pagesToroyrhastee - Experiment No.6anon ggNo ratings yet
- IpunoDocument3 pagesIpunoanon ggNo ratings yet
- Toroy Experiment 4Document1 pageToroy Experiment 4anon ggNo ratings yet
- Toroy Experiment 5Document1 pageToroy Experiment 5anon ggNo ratings yet
- University of CebuDocument2 pagesUniversity of Cebuanon ggNo ratings yet
- Toroyrhastee - Experiment No.6Document5 pagesToroyrhastee - Experiment No.6anon ggNo ratings yet
- Toroy Experiment 3Document2 pagesToroy Experiment 3anon ggNo ratings yet
- Toroy Experiment 3Document2 pagesToroy Experiment 3anon ggNo ratings yet
- Competitive Strategies: Rhastee P. Toroy StudentDocument6 pagesCompetitive Strategies: Rhastee P. Toroy StudentRhastee P. ToroyNo ratings yet
- Toroyrhastee - Experiment No.6Document5 pagesToroyrhastee - Experiment No.6anon ggNo ratings yet
- University of CebuDocument2 pagesUniversity of Cebuanon ggNo ratings yet
- TrizDocument2 pagesTrizRhastee P. ToroyNo ratings yet
- Toroy Experiment 3Document2 pagesToroy Experiment 3anon ggNo ratings yet
- GATE-2006 Physics Question PaperDocument19 pagesGATE-2006 Physics Question PaperDavid HudsonNo ratings yet
- Astable MultivibratorDocument3 pagesAstable MultivibratorTushar GuptaNo ratings yet
- Circuit Techniques For Low-Voltage and High-Speed AD ConvertersDocument256 pagesCircuit Techniques For Low-Voltage and High-Speed AD ConvertersAnkurNo ratings yet
- Mechanic Medical Electronics.146180428Document37 pagesMechanic Medical Electronics.146180428swami061009No ratings yet
- Simple LM386 Audio AmplifierDocument18 pagesSimple LM386 Audio Amplifieragus alimNo ratings yet
- Solve Elec 2-5 Help WindowsDocument35 pagesSolve Elec 2-5 Help WindowsJerome EugeneNo ratings yet
- Operational AmplifiersDocument56 pagesOperational AmplifiersRupert Rosel AmatorioNo ratings yet
- Physics Education in The 21st CenturyDocument82 pagesPhysics Education in The 21st CenturyRahul SinglaNo ratings yet
- Analog Cmos Ic Design SyllabusDocument2 pagesAnalog Cmos Ic Design SyllabusVijay UrkudeNo ratings yet
- 50W DIY Hi-Fi Audio AmplifierDocument7 pages50W DIY Hi-Fi Audio AmplifierGoran ŠtetinNo ratings yet
- E NotesDocument3 pagesE NotesbashasvuceNo ratings yet
- Difference Between Op-Amp and ComparatorDocument7 pagesDifference Between Op-Amp and ComparatorCarloNo ratings yet
- 8-Bit R-2R Ladder Digital To Analog Converter With Equal CurrentsDocument17 pages8-Bit R-2R Ladder Digital To Analog Converter With Equal CurrentsKAMARUDHEEN KPNo ratings yet
- Smallest Radio Circuit Using Two Transistors - Engineering Projects12Document4 pagesSmallest Radio Circuit Using Two Transistors - Engineering Projects12max_orwellNo ratings yet
- Design of Two Stage Op-AmpDocument4 pagesDesign of Two Stage Op-AmpWARSE JournalsNo ratings yet
- ECD Lab NEC 752Document17 pagesECD Lab NEC 752Ravindra Kumar0% (1)
- Energy Generation Using DynamoDocument6 pagesEnergy Generation Using DynamoLeo RaquelNo ratings yet
- A Software-Defined Radio For The Masses - Gerald YoungbloodDocument40 pagesA Software-Defined Radio For The Masses - Gerald YoungbloodvictorplugaruNo ratings yet
- Datasheet 741Document5 pagesDatasheet 741Lucas Ernesto Caetano ErnestoNo ratings yet
- شرح الكترونيات 1 AmplifiersDocument43 pagesشرح الكترونيات 1 AmplifiersAboodA.KhraishiNo ratings yet
- Design of A Low-Power, Low-Cost ECG & EMG Sensor For Wearable Biometric and Medical ApplicationDocument3 pagesDesign of A Low-Power, Low-Cost ECG & EMG Sensor For Wearable Biometric and Medical ApplicationMuhammad Fauzi D4 ElektromedikNo ratings yet
- CS1403 Linear Integrated CircuitsDocument2 pagesCS1403 Linear Integrated CircuitsMohamed Abdul RahimNo ratings yet
- Question # 1a: Vo 1 Vo 1 2 16 Vo 1 32 V Vo 0 Vo 0Document9 pagesQuestion # 1a: Vo 1 Vo 1 2 16 Vo 1 32 V Vo 0 Vo 0Muhammad abdur rehmanNo ratings yet
- Ec8453 - Linear Integrated Circuits: Question BankDocument5 pagesEc8453 - Linear Integrated Circuits: Question Bankrkkumar07No ratings yet
- Electret Amplifier Application NoteDocument14 pagesElectret Amplifier Application NoterobkosaNo ratings yet
- 0700 - PIC-Gen Frequency GeneratorDocument11 pages0700 - PIC-Gen Frequency GeneratorJojo LeaonNo ratings yet
- OpAmp - LM308AN - MotorolaDocument9 pagesOpAmp - LM308AN - MotorolaLudwig SchmidtNo ratings yet
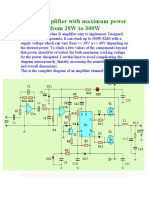
- Class D Amplifier With Maximum Power Adjustable From 20W To 300WDocument13 pagesClass D Amplifier With Maximum Power Adjustable From 20W To 300Wramontv032428No ratings yet
- EM Field DetectorDocument3 pagesEM Field DetectorAnonymous zUO8ZEmNo ratings yet
- Linear Applications of Op-AmpsDocument94 pagesLinear Applications of Op-AmpsManar HosnyNo ratings yet