You might also like
- Serial Communications: ObjectivesDocument26 pagesSerial Communications: ObjectivesAmy OliverNo ratings yet
- Uart Manual and Macros for Xilinx FPGAsDocument13 pagesUart Manual and Macros for Xilinx FPGAsramukajarrNo ratings yet
- Data Sheet: 1.3 GHZ Bidirectional I C-Bus Controlled SynthesizerDocument21 pagesData Sheet: 1.3 GHZ Bidirectional I C-Bus Controlled Synthesizeroliver sepnioNo ratings yet
- Experiment No. 1 (B) : Interfacing UART of LPC2148 To Transmit and Receive MessageDocument4 pagesExperiment No. 1 (B) : Interfacing UART of LPC2148 To Transmit and Receive MessageJohn FarandisNo ratings yet
- Data Sheet: 1.3 GHZ Bidirectional I C-Bus Controlled SynthesizerDocument19 pagesData Sheet: 1.3 GHZ Bidirectional I C-Bus Controlled SynthesizeraledangieNo ratings yet
- 12 UartDocument13 pages12 UartsalmaamsayeddNo ratings yet
- 8051 - Serial CommunicationDocument44 pages8051 - Serial CommunicationDr-Samson ChepuriNo ratings yet
- RS232 InterfacingDocument41 pagesRS232 InterfacingPuspala ManojkumarNo ratings yet
- LMK05028 - Clock GenDocument94 pagesLMK05028 - Clock GenHoang NguyenNo ratings yet
- 09 Nutiny-Nuc029 UartDocument16 pages09 Nutiny-Nuc029 UartDharmendra SavaliyaNo ratings yet
- UARTDocument27 pagesUARTNaveen Kumar100% (1)
- Ic 7805 (Voltage Regulator Ic) : Atmega328Document10 pagesIc 7805 (Voltage Regulator Ic) : Atmega328MohsinRazaNo ratings yet
- Chapter Three3 Narration 1Document14 pagesChapter Three3 Narration 1brightmoreNo ratings yet
- RS232 422 485 I2c SpiDocument6 pagesRS232 422 485 I2c SpiShen JinWei100% (1)
- Experiment 1 UART and RS232C Standard: ObjectivesDocument8 pagesExperiment 1 UART and RS232C Standard: ObjectivesJay PatelNo ratings yet
- MCS9835Document34 pagesMCS9835nicolae7887169No ratings yet
- Cable-Ping Wiring DiagramsDocument9 pagesCable-Ping Wiring DiagramsManuel Fernandez LeyvaNo ratings yet
- Tlx84X Current-Mode PWM Controllers: 1 Features 3 DescriptionDocument26 pagesTlx84X Current-Mode PWM Controllers: 1 Features 3 DescriptionAnonymous t9tLb3WgNo ratings yet
- Slvs 038 IDocument28 pagesSlvs 038 Igabriel6276No ratings yet
- TASCAM CD-400U/CD-400UDAB CONTROL I/O Terminals RS-232C TELNET Protocol SpecificationsDocument28 pagesTASCAM CD-400U/CD-400UDAB CONTROL I/O Terminals RS-232C TELNET Protocol SpecificationsChhim AnasNo ratings yet
- RS232 Serial Communication Configuration and BasicsDocument31 pagesRS232 Serial Communication Configuration and Basicsjaigodara100% (1)
- Hardware Overview (Chapter 2)Document74 pagesHardware Overview (Chapter 2)shkytenkoNo ratings yet
- General Description: FeaturesDocument54 pagesGeneral Description: FeaturesAmirNo ratings yet
- Chapter 8 Memory Interface MC68000Document180 pagesChapter 8 Memory Interface MC68000JevithaNo ratings yet
- Si5348 Rev D Data Sheet: Network Synchronizer For Synce/ 1588 PTP Telecom Boundary (T-BC) and Slave (T-SC) ClocksDocument54 pagesSi5348 Rev D Data Sheet: Network Synchronizer For Synce/ 1588 PTP Telecom Boundary (T-BC) and Slave (T-SC) ClocksABHINASH MAHOR ee12b068No ratings yet
- 09 - I2C Serial CommunicationsmDocument10 pages09 - I2C Serial CommunicationsmSorabh DungNo ratings yet
- MGate MB3170/MB3270 Quick Install GuideDocument6 pagesMGate MB3170/MB3270 Quick Install GuideheikelNo ratings yet
- UART in LPC2148 ARM7 MicrocontrollerDocument8 pagesUART in LPC2148 ARM7 Microcontrollerrudra_1No ratings yet
- Data Sheet: TSA5520 TSA5521Document24 pagesData Sheet: TSA5520 TSA5521Ali BarakatNo ratings yet
- Es Notes Unit 5Document33 pagesEs Notes Unit 51balamanianNo ratings yet
- FA21 Lec16 2021-11-06 UART ProgrammingDocument17 pagesFA21 Lec16 2021-11-06 UART ProgrammingMahreenNo ratings yet
- ST 16Document39 pagesST 16eddi ahmadNo ratings yet
- xr21V1410 131 072513Document28 pagesxr21V1410 131 072513kokantNo ratings yet
- UART Communication: 2023EV167 Department of EceDocument7 pagesUART Communication: 2023EV167 Department of EceNITHYASREE K RNo ratings yet
- AR-727iV3: Part NO. AR-727i V3 AR-727CM V3Document4 pagesAR-727iV3: Part NO. AR-727i V3 AR-727CM V3jorge franco HerreraNo ratings yet
- UART - Universal Asynchronous Receiver TransmitterDocument26 pagesUART - Universal Asynchronous Receiver TransmitterSivaprasad Reddy100% (2)
- 1st Rev Road RaggingDocument22 pages1st Rev Road RaggingElamaruthiNo ratings yet
- Metal Detector Robot Controlled RemotelyDocument25 pagesMetal Detector Robot Controlled RemotelyDarshan ParmarNo ratings yet
- Conexion Backto Back Atraves de Puertos AuxDocument6 pagesConexion Backto Back Atraves de Puertos AuxMario RyesNo ratings yet
- Cypress Uart To Spi Bridge An49694 12Document8 pagesCypress Uart To Spi Bridge An49694 12anilcelebiNo ratings yet
- File 1406270302Document25 pagesFile 1406270302rupeshNo ratings yet
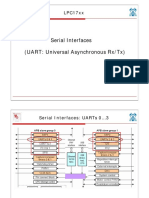
- Serial Interfaces (UART: Universal Asynchronous RX/TX) : LPC17xxDocument37 pagesSerial Interfaces (UART: Universal Asynchronous RX/TX) : LPC17xxSonia212No ratings yet
- PIC-PLC Konacna VerzijaDocument95 pagesPIC-PLC Konacna VerzijaEsma Ko- PopičkaNo ratings yet
- PLL 2002jun12 Amd CT Ntek An01Document20 pagesPLL 2002jun12 Amd CT Ntek An01hirohirofNo ratings yet
- Serial Communication in AVRDocument35 pagesSerial Communication in AVRgopalgeniusNo ratings yet
- Tire Pressure Monitor Sensor Product Specification: MPXY8300 SeriesDocument165 pagesTire Pressure Monitor Sensor Product Specification: MPXY8300 SeriesNahuel RmNo ratings yet
- ARM Experiment ProgrammsDocument52 pagesARM Experiment ProgrammsShweta KulkarniNo ratings yet
- Bpac NoteDocument17 pagesBpac NoteSampreeth Nambisan Perigini100% (1)
- Pam 7q Gps Module Product Guide v10 1Document6 pagesPam 7q Gps Module Product Guide v10 1jose ambiorixNo ratings yet
- All 8251 8255 852Document124 pagesAll 8251 8255 852Sunil KumarNo ratings yet
- RS-232C:TELNET Protocol SpecificationsDocument54 pagesRS-232C:TELNET Protocol SpecificationsJVTO79No ratings yet
- MC Unit 4Document42 pagesMC Unit 4Kalai VaniNo ratings yet
- Class12 15 HSPICEDocument59 pagesClass12 15 HSPICEKavicharan MummaneniNo ratings yet
- Block Proving Axle Counter: Southern Railway Signal & Telecommunication Training CentreDocument17 pagesBlock Proving Axle Counter: Southern Railway Signal & Telecommunication Training CentresampreethpNo ratings yet
- 2023EV167 Department of Ece: UART CommunicationDocument7 pages2023EV167 Department of Ece: UART CommunicationNITHYASREE K RNo ratings yet
- UART Module Generates Serial Communication SignalsDocument21 pagesUART Module Generates Serial Communication SignalsSusie MaestreNo ratings yet
- MP Unit-6 Se-IiDocument51 pagesMP Unit-6 Se-IiNeha KardileNo ratings yet
- XR16C2850Document44 pagesXR16C2850usmancheema81No ratings yet
- IoT Communication Protocols and Data Transmission ExamplesDocument83 pagesIoT Communication Protocols and Data Transmission ExamplesVyshnavi Challa ObullaNo ratings yet
- Customer 1Document1 pageCustomer 1Tiffany HolmesNo ratings yet
- Customer 1Document1 pageCustomer 1Tiffany HolmesNo ratings yet
- Experiment No. 4 Common Emitter Amplifier AIM: Fig 1. Circuit DiagramDocument4 pagesExperiment No. 4 Common Emitter Amplifier AIM: Fig 1. Circuit Diagrampandiyarajan142611No ratings yet
- Customer 1Document1 pageCustomer 1Tiffany HolmesNo ratings yet
- Customer 4Document1 pageCustomer 4ss mNo ratings yet
- Customer 1Document1 pageCustomer 1Tiffany HolmesNo ratings yet
- Customer 1Document1 pageCustomer 1Tiffany HolmesNo ratings yet
- Floating Point NumbersDocument20 pagesFloating Point NumbershemantNo ratings yet
- Serial Buses Jan2015Document44 pagesSerial Buses Jan20151balamanianNo ratings yet
- All All 'Enter Digital Input Information ': For If Else End EndDocument17 pagesAll All 'Enter Digital Input Information ': For If Else End Endss mNo ratings yet
- Unit 1Document1 pageUnit 1ss mNo ratings yet
- Unit-3 Part-A MPMCDocument17 pagesUnit-3 Part-A MPMCsubbaraoNo ratings yet
- Experiment No. 4 Common Emitter Amplifier AIM: Fig 1. Circuit DiagramDocument4 pagesExperiment No. 4 Common Emitter Amplifier AIM: Fig 1. Circuit Diagrampandiyarajan142611No ratings yet
- Electromagnetic Field Theory: "Our Thoughts and Feelings Have Electromagnetic Reality. Manifest Wisely."Document66 pagesElectromagnetic Field Theory: "Our Thoughts and Feelings Have Electromagnetic Reality. Manifest Wisely."Kavya Mamilla100% (1)
- ADC ImpqnsDocument4 pagesADC Impqnsss mNo ratings yet
- Lecture Notes: Microprocessors and MicrocontrollersDocument217 pagesLecture Notes: Microprocessors and MicrocontrollersNikhila NikkiNo ratings yet
- Mid 2 BitsDocument17 pagesMid 2 Bitsss mNo ratings yet
- Samskrutha PravahiniDocument38 pagesSamskrutha PravahiniShayan GudipalliNo ratings yet
- 1Document12 pages1ss mNo ratings yet
- Electromagnetic Field Theory: "Our Thoughts and Feelings Have Electromagnetic Reality. Manifest Wisely."Document66 pagesElectromagnetic Field Theory: "Our Thoughts and Feelings Have Electromagnetic Reality. Manifest Wisely."Kavya Mamilla100% (1)
- Ijet 22964Document4 pagesIjet 22964ss mNo ratings yet
- 2-Days Android Apps ProposalDocument6 pages2-Days Android Apps Proposalss mNo ratings yet
- GmaiDocument4 pagesGmaiss mNo ratings yet
- Confirmation Letter For Zonal CenterDocument2 pagesConfirmation Letter For Zonal Centerss mNo ratings yet
- Etreprenuer Development Cell-Sritw: Plan of Action For The Current Academic Year Lecture SeriesDocument1 pageEtreprenuer Development Cell-Sritw: Plan of Action For The Current Academic Year Lecture Seriesss mNo ratings yet
- Gem 2016 2017 Global Report Web Version 1486181226Document180 pagesGem 2016 2017 Global Report Web Version 1486181226Irfan AzmiNo ratings yet
- Ec QnsDocument1 pageEc Qnsss mNo ratings yet
- 5 Edc 2007-01-06 - NvohraDocument33 pages5 Edc 2007-01-06 - Nvohrass mNo ratings yet
- Rural Entrepreneurship in Developing Countries: Challenges, Problems and Performance AppraisalDocument6 pagesRural Entrepreneurship in Developing Countries: Challenges, Problems and Performance AppraisalNeelam SpandanaNo ratings yet
- Summative Assessment BlueprintDocument3 pagesSummative Assessment Blueprintapi-243052379No ratings yet
- Improving MAPEH Teaching and Learning StrategiesDocument3 pagesImproving MAPEH Teaching and Learning StrategiesJackie B. ZitaNo ratings yet
- How The Oxford National Curriculum Tests Can Support You As Baseline TestsDocument4 pagesHow The Oxford National Curriculum Tests Can Support You As Baseline TestsNaz AhmedNo ratings yet
- SocializationDocument7 pagesSocializationayyazibrahim786No ratings yet
- MIL 1st Week ExemplarDocument4 pagesMIL 1st Week ExemplarRickely BantaNo ratings yet
- Sarah Sweeney ResumeDocument2 pagesSarah Sweeney ResumeSarah C. SweeneyNo ratings yet
- Interview Questions BpoDocument7 pagesInterview Questions BpoZyrene NeriNo ratings yet
- Allendale Language School: Education Marketing PlanDocument13 pagesAllendale Language School: Education Marketing PlanVidushi GoyalNo ratings yet
- Mikyung Kim Wolf, Yuko Goto Butler - English Language Proficiency Assessments For Young Learners-Routledge (2017) PDFDocument295 pagesMikyung Kim Wolf, Yuko Goto Butler - English Language Proficiency Assessments For Young Learners-Routledge (2017) PDFEric CardovaNo ratings yet
- Persuasive Writing Outline and RubricDocument6 pagesPersuasive Writing Outline and Rubricans04h3000100% (15)
- Verbal and Non Verbal Communication Organizational Change and Work MotivationDocument41 pagesVerbal and Non Verbal Communication Organizational Change and Work MotivationCherry Molde100% (1)
- Struggles with Online Learning and Technical IssuesDocument4 pagesStruggles with Online Learning and Technical IssuesRussel ArcegaNo ratings yet
- LTM 612 Lesson PlanDocument3 pagesLTM 612 Lesson Planapi-323746679No ratings yet
- Textbook EvaluationDocument15 pagesTextbook EvaluationNatalia Francisca González Aburto0% (1)
- Chapter 18: Communication and CollaborationDocument3 pagesChapter 18: Communication and Collaborationюрий локтионовNo ratings yet
- Youtube Saturation: Drive in Massive Traffic With Youtube!Document16 pagesYoutube Saturation: Drive in Massive Traffic With Youtube!MiraNo ratings yet
- 04 Academic Writing - Thesis Statement-Paraphrase-Outline-SummaryDocument13 pages04 Academic Writing - Thesis Statement-Paraphrase-Outline-SummaryMama JulietNo ratings yet
- Alfin Rabbani (4) Xii Ips 1-Uh Bing WajibDocument3 pagesAlfin Rabbani (4) Xii Ips 1-Uh Bing Wajibarhyo fataNo ratings yet
- LP 3Document3 pagesLP 3Hannah Katreena Joyce JuezanNo ratings yet
- Communication Aids and Strategies Using Tool of Technology: Mam SalveDocument19 pagesCommunication Aids and Strategies Using Tool of Technology: Mam SalveRonizza ElardoNo ratings yet
- Division Lesson PlanDocument3 pagesDivision Lesson Planapi-391235041No ratings yet
- Week 12 Lesson PlansDocument4 pagesWeek 12 Lesson Plansapi-293772840No ratings yet
- Meningkatkan Kemampuan Grammar Mahasiswa Jurusan Bahasa InggrisDocument17 pagesMeningkatkan Kemampuan Grammar Mahasiswa Jurusan Bahasa InggrisPertiwi Vera NoviaNo ratings yet
- Empowerment Technologies Module 2Document31 pagesEmpowerment Technologies Module 2Mark Padin VillaplazaNo ratings yet
- Sprout House LessonDocument4 pagesSprout House Lessonapi-404464877No ratings yet
- Educational Qualifications: Dheeraj GuptaDocument2 pagesEducational Qualifications: Dheeraj GuptaJhakkas NihongoNo ratings yet
- Adsl BasicsDocument5 pagesAdsl BasicsSuyash PrakashNo ratings yet
- Kat Goetting CVDocument3 pagesKat Goetting CVapi-309950663No ratings yet
- Independent Practice Samples TESOLDocument2 pagesIndependent Practice Samples TESOLMarcela TintinagoNo ratings yet
- Pointers To Review Pointers To Review: ST ST ST STDocument1 pagePointers To Review Pointers To Review: ST ST ST STJanine AranasNo ratings yet