You might also like
- Cold Forming of Metals SafetyDocument19 pagesCold Forming of Metals SafetyHari KoneruNo ratings yet
- En 1355 K Ed3Document2 pagesEn 1355 K Ed3Sowmen Chakroborty100% (1)
- Robotic Gripper DesignDocument22 pagesRobotic Gripper DesignHaider-e-KararNo ratings yet
- Gripper Mechanism: Department of Mechanical EngineeringDocument16 pagesGripper Mechanism: Department of Mechanical EngineeringSoumik DasNo ratings yet
- KEB GM 2014 3 - enDocument109 pagesKEB GM 2014 3 - envankarpNo ratings yet
- Design of Mechanical GripperDocument64 pagesDesign of Mechanical GripperOtavio12350% (4)
- Linear GuideDocument1,539 pagesLinear Guidered_shobo_85No ratings yet
- Catalog Universaluri, Bacuri, Flanse BERNARDO - Austria - eMasiniUnelteDocument22 pagesCatalog Universaluri, Bacuri, Flanse BERNARDO - Austria - eMasiniUnelteExpert Masini UnelteNo ratings yet
- Tensile TestDocument8 pagesTensile TestChaminduKrishanRupasinghe100% (1)
- Hydraulic PressesDocument13 pagesHydraulic PressesAhmed Adel ShatlaNo ratings yet
- Surface Roughness Model For St37Document4 pagesSurface Roughness Model For St37fitraskaNo ratings yet
- Proiect Organe de Masini (Reductor)Document25 pagesProiect Organe de Masini (Reductor)SebiNo ratings yet
- Bazele Proceselor de FabricatieDocument8 pagesBazele Proceselor de FabricatieBebitza CordobaNo ratings yet
- 4.12 Tractor StabilityDocument4 pages4.12 Tractor Stabilityniloy_67No ratings yet
- Turbo 8-80!8!80XT Series 3 Original Operating Instructions Edition 10-10Document122 pagesTurbo 8-80!8!80XT Series 3 Original Operating Instructions Edition 10-10Selvedin Gudic0% (1)
- Schaeffler Technology Rapport Om Skader På IC4 Aksellejekasser, 28. Marts 2011Document38 pagesSchaeffler Technology Rapport Om Skader På IC4 Aksellejekasser, 28. Marts 2011IngenioerenNo ratings yet
- Reductoare MotoareDocument243 pagesReductoare MotoareDragosNo ratings yet
- Locking in Finite Element AnalysisDocument44 pagesLocking in Finite Element AnalysisPrangyadeepta ChoudhuryNo ratings yet
- National Institute of Technology Warangal Department of Mechanical Engineering Warangal - 506 004Document50 pagesNational Institute of Technology Warangal Department of Mechanical Engineering Warangal - 506 004Venu Gopal AnneNo ratings yet
- Design For XDocument48 pagesDesign For XIvan ViewerNo ratings yet
- FEMFAT Boundary LayersDocument17 pagesFEMFAT Boundary LayersamitNo ratings yet
- FTL Broschuere Fineblanking Technology enDocument20 pagesFTL Broschuere Fineblanking Technology enVinod ChandranNo ratings yet
- Next Search Back Section Contents: Guide For Design Table 4-2Document12 pagesNext Search Back Section Contents: Guide For Design Table 4-2MihaiTaNo ratings yet
- Design and Fabrication of Leaf JigDocument9 pagesDesign and Fabrication of Leaf JigAnonymous Clyy9NNo ratings yet
- Hydraulic Torque Pump Hi-ForceDocument3 pagesHydraulic Torque Pump Hi-ForceZool HilmiNo ratings yet
- MTM Lab ManualDocument23 pagesMTM Lab ManualMian Abdul Rehman100% (1)
- Material Designation Comparison of German and Chinese - 2007Document23 pagesMaterial Designation Comparison of German and Chinese - 2007yw_oulalaNo ratings yet
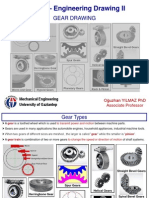
- Gear Drawing PDFDocument12 pagesGear Drawing PDFpradeep315No ratings yet
- Vdocuments - MX - Din 332 2 Gauri de Centrare PDFDocument1 pageVdocuments - MX - Din 332 2 Gauri de Centrare PDFMikeNo ratings yet
- BallScrew by THK PDFDocument488 pagesBallScrew by THK PDFarun kiranNo ratings yet
- Electrical Malfunctions Vibrodiagnosis at The Direct Current MotorsDocument5 pagesElectrical Malfunctions Vibrodiagnosis at The Direct Current MotorsCristian BanarieNo ratings yet
- Kisssoft Tut 003 E KeyDocument11 pagesKisssoft Tut 003 E KeyLuis TestaNo ratings yet
- Aplicaţie: Elaborarea Itinerarului Tehnologic Si A Programului CNC Pentru Strunjirea Completa A Piesei de Proba PPR54Document3 pagesAplicaţie: Elaborarea Itinerarului Tehnologic Si A Programului CNC Pentru Strunjirea Completa A Piesei de Proba PPR54Andreea MariaNo ratings yet
- DRILL JIG (Final One)Document21 pagesDRILL JIG (Final One)Varshasonawane962No ratings yet
- Charpy Impact Test: Strength-Of-Materials Lab (../index - HTML)Document5 pagesCharpy Impact Test: Strength-Of-Materials Lab (../index - HTML)Gond AbhishekNo ratings yet
- Mecanism Pinion Cremaliera (Rack and Pinion)Document56 pagesMecanism Pinion Cremaliera (Rack and Pinion)GheorgheRazvanMarianNo ratings yet
- BroachingDocument22 pagesBroachingvijchoudhary16No ratings yet
- Lecture 4 Theory of Chips FormationDocument53 pagesLecture 4 Theory of Chips Formationnickokinyunyu11No ratings yet
- PDM Engineering Pvt. LTDDocument24 pagesPDM Engineering Pvt. LTDMithun SarkarNo ratings yet
- Scheduling and Requirements: 01 - Introduction, Injection Moulding and MachinesDocument4 pagesScheduling and Requirements: 01 - Introduction, Injection Moulding and MachinesDaniAmdaniNo ratings yet
- Profile ProjectorDocument25 pagesProfile Projectorrummanomar0% (2)
- DME-814 Computer Integrated ManufacturingDocument76 pagesDME-814 Computer Integrated ManufacturingFarooq ShahNo ratings yet
- Din 509Document14 pagesDin 509Bruno Menon0% (1)
- Bolt Tightening ForceDocument1 pageBolt Tightening Forceiwanguna71No ratings yet
- Moog-Ball Screws Planetary Roller Screws-DatasheetDocument2 pagesMoog-Ball Screws Planetary Roller Screws-DatasheetvaneaNo ratings yet
- Automotive BearingDocument29 pagesAutomotive BearingAhmed AbdelghanyNo ratings yet
- Ansamblu Reductor MelcatDocument1 pageAnsamblu Reductor MelcathascaNo ratings yet
- Mould and Stamping ToolsDocument33 pagesMould and Stamping Toolsravinder majraNo ratings yet
- ISO Metric Screw Thread - WikipediaDocument6 pagesISO Metric Screw Thread - WikipediamarceloNo ratings yet
- Stair Treads - Guidance For Industrial Use: BS/EN ISO 14122-1,2,3Document2 pagesStair Treads - Guidance For Industrial Use: BS/EN ISO 14122-1,2,3jinyuan74No ratings yet
- Kisssoft General Manual - eDocument1,032 pagesKisssoft General Manual - eanhntran48500% (1)
- Sheave Design Manual NYCASTDocument8 pagesSheave Design Manual NYCASTChusnadiNo ratings yet
- NSK Rollneck Bearing ManualDocument36 pagesNSK Rollneck Bearing ManualFaizNo ratings yet
- Appndx74 Model Selection by RCP2 GripperDocument1 pageAppndx74 Model Selection by RCP2 GripperReynald De VeraNo ratings yet
- Fms200806 Timing Belts Calc Methods 202 enDocument28 pagesFms200806 Timing Belts Calc Methods 202 enbrviraniNo ratings yet
- Structural Analysis of Multi-Plate ClutchDocument5 pagesStructural Analysis of Multi-Plate ClutchseventhsensegroupNo ratings yet
- Platform - Bracing SupportDocument12 pagesPlatform - Bracing Supportpandiangv100% (1)
- 202-Fms Timing Belts Calc Methods enDocument28 pages202-Fms Timing Belts Calc Methods enYesenia AquilinaNo ratings yet
- Final Design of Angle Members For 4leged Single Angle TowersDocument65 pagesFinal Design of Angle Members For 4leged Single Angle Towersks_raghuveerNo ratings yet
- Engineering Reference: Sizing and Selection of Exlar Linear and Rotary ActuatorsDocument8 pagesEngineering Reference: Sizing and Selection of Exlar Linear and Rotary ActuatorsJelena BauerNo ratings yet
- Phy110 Chapter7 Momentum PDFDocument21 pagesPhy110 Chapter7 Momentum PDFMisakiNo ratings yet
- Chap 01 Class Lecture For StudentsDocument76 pagesChap 01 Class Lecture For StudentsMaslinda Mat SharifNo ratings yet
- MOdern Physics ReviewDocument9 pagesMOdern Physics ReviewpunxheretostayNo ratings yet
- Global 2 Tip Dress Setup Users Manual For 7.5 REV 1.0Document40 pagesGlobal 2 Tip Dress Setup Users Manual For 7.5 REV 1.0zganonNo ratings yet
- KIITEE Syllabus 3Document2 pagesKIITEE Syllabus 3AnweshaBoseNo ratings yet
- Series 9170: Switching Repeater Field Circuit Ex IDocument22 pagesSeries 9170: Switching Repeater Field Circuit Ex IAshok AeroNo ratings yet
- Earth Mat Design For 132/33Kv Substation in Rivers State Using ETAPDocument15 pagesEarth Mat Design For 132/33Kv Substation in Rivers State Using ETAPTafadzwa MurwiraNo ratings yet
- Wheatstone Bridge ProblemsDocument10 pagesWheatstone Bridge ProblemsMadhavan KNo ratings yet
- Engineering Fluid Mechanics: (8th Edition)Document4 pagesEngineering Fluid Mechanics: (8th Edition)كرار عبدالحسين قاسمNo ratings yet
- EM Lab ManualDocument41 pagesEM Lab Manualrohit100% (1)
- Phillips Electric Fields PDFDocument8 pagesPhillips Electric Fields PDFjan rogerNo ratings yet
- Modelling The Elastodynamic Behaviour of A DesmodrDocument11 pagesModelling The Elastodynamic Behaviour of A DesmodrIkshwakNo ratings yet
- Long JumpDocument5 pagesLong JumpjehargrNo ratings yet
- Example HV Engineering Wadha - 2Document5 pagesExample HV Engineering Wadha - 2Khairi SaidNo ratings yet
- PHYSICS Review Guide 2D Motion: M - L B NDocument4 pagesPHYSICS Review Guide 2D Motion: M - L B Npotatoman51325No ratings yet
- HIPOT Testing Dielectric Strength TestDocument4 pagesHIPOT Testing Dielectric Strength TestAriel DimacaliNo ratings yet
- UNIT-3 Magnetic Particle TestingDocument40 pagesUNIT-3 Magnetic Particle TestingPratap KumarNo ratings yet
- DC ChokeDocument4 pagesDC ChokeManish KaushikNo ratings yet
- Flaganan - Handbook of Transformer Design ApplicationsDocument237 pagesFlaganan - Handbook of Transformer Design Applicationsparallax1957100% (1)
- Amal Basic of Elec Troubleshooting Copy TugasDocument20 pagesAmal Basic of Elec Troubleshooting Copy TugasAl Iskandari Avfan HudaNo ratings yet
- Lab 06 Electrostatic Energy Stored in CapacitorsDocument10 pagesLab 06 Electrostatic Energy Stored in CapacitorsAmjadNo ratings yet
- Chapter 3 Phase Induction MachinesDocument101 pagesChapter 3 Phase Induction Machineskelemyas ayalewNo ratings yet
- Class 11 Physics Practice PaperDocument3 pagesClass 11 Physics Practice PapereltytanNo ratings yet
- Speed and Velocity: LessonDocument19 pagesSpeed and Velocity: LessonImman Ray Loriezo AguilarNo ratings yet
- Chapter 2 Principles of Hydrostatic PressureDocument8 pagesChapter 2 Principles of Hydrostatic PressureJovilyn SantiagoNo ratings yet
- Lab 07Document2 pagesLab 07reza66No ratings yet
- Design of Snubber Circuit Using PspiceDocument4 pagesDesign of Snubber Circuit Using Pspiceelpatotas22No ratings yet
- 14 01Document14 pages14 01leonard1971No ratings yet
- 2003-Optimum Design of Snubber Capacitors in 9kW Three-Phase InverterDocument4 pages2003-Optimum Design of Snubber Capacitors in 9kW Three-Phase InverterGabriel MejiaNo ratings yet
- Weekly Assessment Number 3Document1 pageWeekly Assessment Number 3Marissa FontanilNo ratings yet