You might also like
- ResolverDocument2 pagesResolverVladimirAgeevNo ratings yet
- 2308071512_JSMSEMI-TL431_C963380Document8 pages2308071512_JSMSEMI-TL431_C963380Andres GvNo ratings yet
- Fan Coil Room Thermostat RDF510, RDF530 : en ZHDocument2 pagesFan Coil Room Thermostat RDF510, RDF530 : en ZHمحمد عليNo ratings yet
- 12 Bit Angular Magnetic Encoder IC: Data Sheet Issue 9, 30 November 2021Document28 pages12 Bit Angular Magnetic Encoder IC: Data Sheet Issue 9, 30 November 2021ELAVARASANTHAMIZHNo ratings yet
- Ring Frobnicator: To Millenium Bypass Batt Clip Led 3 Depth 10K Lin (Back) (Back) Freq 100K Log Trem/Ring (SPDT)Document1 pageRing Frobnicator: To Millenium Bypass Batt Clip Led 3 Depth 10K Lin (Back) (Back) Freq 100K Log Trem/Ring (SPDT)Emmanuel SanzNo ratings yet
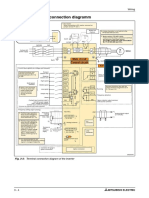
- Terminal Connection Diagramm WiringDocument3 pagesTerminal Connection Diagramm WiringTran LeNo ratings yet
- Bosch Sensor TPSDocument3 pagesBosch Sensor TPSSport Rally TeamNo ratings yet
- Moog n123-134Document4 pagesMoog n123-134IrwinNo ratings yet
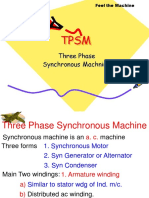
- TPSM IntroductionDocument42 pagesTPSM Introductionvishal9119No ratings yet
- Practical-Electronics-1973-09 Phase UnitDocument4 pagesPractical-Electronics-1973-09 Phase UnitJohan TaalanderwijsNo ratings yet
- XFlo - Position Transmitter & Limit SwitchDocument4 pagesXFlo - Position Transmitter & Limit SwitchVarun PatelNo ratings yet
- Generator Protection: P P FrancisDocument70 pagesGenerator Protection: P P FrancisbrijeshBNo ratings yet
- MotorynkaDocument5 pagesMotorynkaJanNo ratings yet
- Stub Matching PDFDocument23 pagesStub Matching PDFNguyễn Văn HuyNo ratings yet
- Reverse Polarity Circuit ExampleDocument2 pagesReverse Polarity Circuit ExampleClifford LambertNo ratings yet
- Op Amp StabilityDocument32 pagesOp Amp Stabilityapdim79No ratings yet
- NTE3050 Seven Segment LED Display .270 Inch, Common Anode, LHDPDocument3 pagesNTE3050 Seven Segment LED Display .270 Inch, Common Anode, LHDPTarun SharmaNo ratings yet
- Synchronous GeneratorsDocument69 pagesSynchronous GeneratorsNetaa sachinNo ratings yet
- Power Electronics - Inverters1 PDFDocument12 pagesPower Electronics - Inverters1 PDFrotluNo ratings yet
- Cardinal Trem V2Document11 pagesCardinal Trem V2fbsrosaNo ratings yet
- TX Topper Assembly 16 May 08Document1 pageTX Topper Assembly 16 May 08fox7878No ratings yet
- 2021 4-2 Induction Machines Circuit Analysis PPT v3Document21 pages2021 4-2 Induction Machines Circuit Analysis PPT v3Issa DialloNo ratings yet
- OPAMP WAVEFORM GENERATORDocument4 pagesOPAMP WAVEFORM GENERATORLevingstan YesudhasNo ratings yet
- TDA9102C STMicroelectronicsDocument7 pagesTDA9102C STMicroelectronicsbshitechNo ratings yet
- EE 4PM4 Quiz 1 Solutions - 2016-17Document4 pagesEE 4PM4 Quiz 1 Solutions - 2016-17PreethamNo ratings yet
- Synchronous K-NotesDocument11 pagesSynchronous K-Notesomkar budigeNo ratings yet
- D92 02 Ultar Fest PDFDocument5 pagesD92 02 Ultar Fest PDFCicero MelloNo ratings yet
- Eee3091F: Energy Conversion Induction Machines II (Chapter 5 - PC Sen)Document29 pagesEee3091F: Energy Conversion Induction Machines II (Chapter 5 - PC Sen)Yousuf IsaacsNo ratings yet
- Terminal Connection Diagramm WiringDocument3 pagesTerminal Connection Diagramm WiringTran LeNo ratings yet
- MITEQ SingleDoubleTripleBalancedSchottkyDiodeMixersDocument9 pagesMITEQ SingleDoubleTripleBalancedSchottkyDiodeMixersTom BlattnerNo ratings yet
- Regulated DC power supply with current limiter and adjustable outputDocument5 pagesRegulated DC power supply with current limiter and adjustable outputЂорђе МалешевићNo ratings yet
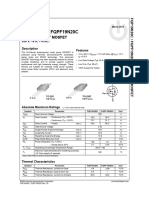
- FQP19N20CDocument10 pagesFQP19N20CVinicio VieiraNo ratings yet
- 8 Turbdesign MultistageDocument8 pages8 Turbdesign MultistageAneeq RaheemNo ratings yet
- Zonk Machine AnalysisDocument5 pagesZonk Machine AnalysisRobWileyNo ratings yet
- Ba6a Tips and TrixDocument10 pagesBa6a Tips and TrixDerick FernandesNo ratings yet
- ControlDocument1 pageControlНиколай ИвановNo ratings yet
- Induction Machines - IVDocument23 pagesInduction Machines - IVShadrackNo ratings yet
- Dual Axis Tracker SchematicDocument1 pageDual Axis Tracker Schematicasd dssNo ratings yet
- Infrared Sensors Snaa207Document8 pagesInfrared Sensors Snaa207midi663No ratings yet
- STTA1512PI Orgn Diod Conmm inDocument9 pagesSTTA1512PI Orgn Diod Conmm inmylitalindaNo ratings yet
- AOZ1038DIDocument15 pagesAOZ1038DIjiledarNo ratings yet
- Equivalent Circuit Three Phase Induction Motor - Squirrel CageDocument1 pageEquivalent Circuit Three Phase Induction Motor - Squirrel CageIR fanNo ratings yet
- Distance ProtectionDocument24 pagesDistance ProtectionJulio AristizabalNo ratings yet
- Study of Single Phase Half Wave SCR ConverterDocument4 pagesStudy of Single Phase Half Wave SCR ConverterKrutideepa BeheraNo ratings yet
- Logic Inputs in Digital Protective RelaysDocument11 pagesLogic Inputs in Digital Protective RelaysSugar RayNo ratings yet
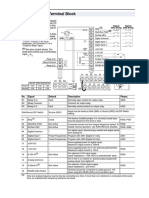
- Control Terminal Block: Important: The Drive Is ShippedDocument1 pageControl Terminal Block: Important: The Drive Is ShippedAvinash GokhaleNo ratings yet
- Commutation and Incremental Magnetic Encoder SolutionsDocument21 pagesCommutation and Incremental Magnetic Encoder SolutionsPAOLONo ratings yet
- Taiko-Tb2 Rev070717 PDFDocument1 pageTaiko-Tb2 Rev070717 PDFdelioymanuelNo ratings yet
- Electricity WorkbookDocument5 pagesElectricity WorkbookLeevan BarrattNo ratings yet
- Ref 012 FCDocument8 pagesRef 012 FCأحمد زغارىNo ratings yet
- Propulsion Lect 11 Axial TurbinesDocument28 pagesPropulsion Lect 11 Axial TurbinessanjayNo ratings yet
- PEC11R Series - 12 MM Incremental Encoder: FeaturesDocument4 pagesPEC11R Series - 12 MM Incremental Encoder: FeaturesmorthredNo ratings yet
- Experiment 10: To Plot The Magnitude and Phase Response of A Third-Order Butterworth Low Pass FilterDocument5 pagesExperiment 10: To Plot The Magnitude and Phase Response of A Third-Order Butterworth Low Pass FilterEngr. Afshan ishaq Electronics ABTNo ratings yet
- For New Designs: AOZ1051PIDocument14 pagesFor New Designs: AOZ1051PISelmar CavalcantiNo ratings yet
- TR77-FR8L Trigger Interface PCB R1-1Document5 pagesTR77-FR8L Trigger Interface PCB R1-1Columna Vertebralis LarvaNo ratings yet
- RR Series RelayDocument4 pagesRR Series RelaypepitoNo ratings yet
- For New Designs: AOZ1033AIDocument15 pagesFor New Designs: AOZ1033AIPaulo Roberto s freireNo ratings yet
- YW-UTC2030A DatasheetDocument15 pagesYW-UTC2030A Datasheetsafarinote7No ratings yet
- 13-Ref List Phoceenne Rev.1 (2010-2017)Document25 pages13-Ref List Phoceenne Rev.1 (2010-2017)Jawad BasraNo ratings yet
- Core of Yoga: EnglishDocument39 pagesCore of Yoga: EnglishVivekananda KendraNo ratings yet
- cs830 A4rdDocument10 pagescs830 A4rdprimero marnezNo ratings yet
- Physics For The Technician-ZhdanovDocument643 pagesPhysics For The Technician-Zhdanovdurant2616No ratings yet
- Anixter Energy Efficiency and Environmental Considerations For The Data Center White Paper en UsDocument8 pagesAnixter Energy Efficiency and Environmental Considerations For The Data Center White Paper en Ussaba0707No ratings yet
- Drilling horizontal wells with electric downhole motorsDocument10 pagesDrilling horizontal wells with electric downhole motorsGregory DemerjiNo ratings yet
- Wolfson Eup3 Ch34 Test BankDocument17 pagesWolfson Eup3 Ch34 Test BankifghelpdeskNo ratings yet
- PPMP 2023 - MO - Repair & MaintenanceDocument9 pagesPPMP 2023 - MO - Repair & MaintenanceRosalie Baldivino GarsulaNo ratings yet
- Dulhunty Power LinksDocument13 pagesDulhunty Power Linksryan_jay55No ratings yet
- Chapter 2 PDFDocument20 pagesChapter 2 PDFCatherineNo ratings yet
- Paper ListDocument45 pagesPaper ListJorgeNo ratings yet
- 9702 w13 QP 43 PDFDocument24 pages9702 w13 QP 43 PDFRamesh Kumar SinghNo ratings yet
- Introduction to Multilevel InvertersDocument53 pagesIntroduction to Multilevel InvertersAnnas QureshiNo ratings yet
- Time Leadership V 2 0Document77 pagesTime Leadership V 2 0zolikelemenNo ratings yet
- Ancient Indian science of construction and designDocument11 pagesAncient Indian science of construction and designbshashi9100% (1)
- AirbusDocument52 pagesAirbusKyriakos TousNo ratings yet
- IEC Earthing Types TN, TT, ITDocument5 pagesIEC Earthing Types TN, TT, ITNavneet Singh100% (1)
- Astm d5682Document4 pagesAstm d5682Ernesto Morales100% (1)
- FLNGDocument25 pagesFLNGMohammad Iqbal Mahamad Amir100% (2)
- FTJ November 2010Document6 pagesFTJ November 2010Sharan Kumar GNo ratings yet
- Introduction To Renewable Energy For Engineers 1st Edition Hagen Solutions Manual PDFDocument81 pagesIntroduction To Renewable Energy For Engineers 1st Edition Hagen Solutions Manual PDFa390573370No ratings yet
- Engine Control System Diagram: Engine - 3Uz-Fe Engine 70Document21 pagesEngine Control System Diagram: Engine - 3Uz-Fe Engine 70bob loblaw67% (3)
- Model Divison Musa PakDocument6 pagesModel Divison Musa PakSania AliNo ratings yet
- EME 1 SemQuestionsDocument5 pagesEME 1 SemQuestionsKalyani SethuramanNo ratings yet
- Benefits of Variable Speed Drives in Sugar Production: White PaperDocument12 pagesBenefits of Variable Speed Drives in Sugar Production: White PaperMashudi FikriNo ratings yet
- Fluid Mechanics Assignment-5 (Momentum Conservation) : Aditya BandopadhyayDocument9 pagesFluid Mechanics Assignment-5 (Momentum Conservation) : Aditya BandopadhyayGunda Venkata SaiNo ratings yet
- SESB Certified ContractorsDocument10 pagesSESB Certified Contractorsarvind raj100% (1)
- Improve Heavy Oil Recovery with Steam FloodingDocument11 pagesImprove Heavy Oil Recovery with Steam FloodingMuhammad Sarmad AzamNo ratings yet
- Alexander Trofimov Report 2012Document7 pagesAlexander Trofimov Report 2012vanvan9No ratings yet
- D 9 MHDocument2 pagesD 9 MHDante FloresNo ratings yet