You might also like
- An Improved Droop Control Method For DC Microgrids Based On Low Bandwidth Communication With DC Bus Voltage Restoration and Enhanced Current Sharing AccuracyDocument13 pagesAn Improved Droop Control Method For DC Microgrids Based On Low Bandwidth Communication With DC Bus Voltage Restoration and Enhanced Current Sharing AccuracyMashood NasirNo ratings yet
- Lu 2015Document14 pagesLu 2015Arian MahdavianNo ratings yet
- Bi-Directional AC-DC/DC-AC Converter For Power Sharing of Hybrid AC/DC SystemsDocument8 pagesBi-Directional AC-DC/DC-AC Converter For Power Sharing of Hybrid AC/DC SystemsJitender KaushalNo ratings yet
- A Grid Interface Current Control Strategy For DC MicrogridsDocument8 pagesA Grid Interface Current Control Strategy For DC MicrogridsPradeep Kumar SahuNo ratings yet
- Improving Control Performance in DC Micro-Grids With Distributed GenerationsDocument12 pagesImproving Control Performance in DC Micro-Grids With Distributed GenerationsmariniNo ratings yet
- 7 Decentralized Load Sharing in A Low-Voltage Direct Current Microgrid With An Adaptive Droop Approach Based On A Superimposed FrequencyDocument11 pages7 Decentralized Load Sharing in A Low-Voltage Direct Current Microgrid With An Adaptive Droop Approach Based On A Superimposed FrequencyShubham PrajapatiNo ratings yet
- An Enhanced Droop Control Method For Accurate Load Sharing and Voltage Improvement of Isolated and Interconnected DC MicrogridsDocument11 pagesAn Enhanced Droop Control Method For Accurate Load Sharing and Voltage Improvement of Isolated and Interconnected DC MicrogridsRiad TifaNo ratings yet
- Applied SciencesDocument27 pagesApplied SciencesFayadh AleneziNo ratings yet
- Hierarchical Control of Parallel AC-DC C PDFDocument10 pagesHierarchical Control of Parallel AC-DC C PDFAditya jhaNo ratings yet
- Liu 2021Document12 pagesLiu 2021tusharshharmaNo ratings yet
- DC Microgrid Operational Method For Enhanced Service Reliability Using DC Bus SignalingDocument13 pagesDC Microgrid Operational Method For Enhanced Service Reliability Using DC Bus SignalingJitender KaushalNo ratings yet
- Autonomous DC Voltage Control of A DC Microgrid With Multiple Slack Terminals PDFDocument9 pagesAutonomous DC Voltage Control of A DC Microgrid With Multiple Slack Terminals PDFVamshi KrishnaNo ratings yet
- Design - Implementation - and - Operation - of - An - Education - Laboratory-Scale - Microgrid - IEEE Access Apr.2021Document18 pagesDesign - Implementation - and - Operation - of - An - Education - Laboratory-Scale - Microgrid - IEEE Access Apr.2021Chaymae MarzoukiNo ratings yet
- IEEEJESTPE2106Document10 pagesIEEEJESTPE2106محمد عقيل عبد الامير ستارNo ratings yet
- Distributed Adaptive Droop Control For DC Distribution SystemsDocument13 pagesDistributed Adaptive Droop Control For DC Distribution SystemsArian MahdavianNo ratings yet
- A Unified Control and Power Management Scheme For PV-Battery-Based Hybrid Microgrids For Both Grid-Connected and Islanded ModesDocument11 pagesA Unified Control and Power Management Scheme For PV-Battery-Based Hybrid Microgrids For Both Grid-Connected and Islanded ModesBHARADWAJ CHIVUKULANo ratings yet
- Energies 16 05369Document20 pagesEnergies 16 05369Rianfatah M.No ratings yet
- Fardapaper Control Strategy For AC DC Microgrid With Hybrid Energy Storage Under Different Operating ModesDocument10 pagesFardapaper Control Strategy For AC DC Microgrid With Hybrid Energy Storage Under Different Operating ModesPradeep Kumar SahuNo ratings yet
- (IEEE 2015 IEEE Industry Applications Society Annual Meeting - Addison, TX, USA (2015.10.18-2015.10.22) ) 2015 IEEEDocument8 pages(IEEE 2015 IEEE Industry Applications Society Annual Meeting - Addison, TX, USA (2015.10.18-2015.10.22) ) 2015 IEEEjohnsonNo ratings yet
- Applied EnerDocument12 pagesApplied Enersoumiya mekraziNo ratings yet
- Active Compensation Technique For Converter-Fed AC MicrogridsDocument5 pagesActive Compensation Technique For Converter-Fed AC MicrogridserpublicationNo ratings yet
- Grid-Connected Photovoltaic Systems With Energy Storage For Ancillary ServicesDocument34 pagesGrid-Connected Photovoltaic Systems With Energy Storage For Ancillary ServicesLuccas TadeuNo ratings yet
- Control Scheme of Three-Level NPC Inverter For Integration of Renewable Energy Resources Into AC GridDocument12 pagesControl Scheme of Three-Level NPC Inverter For Integration of Renewable Energy Resources Into AC GridramunitNo ratings yet
- Distributed Cooperative Control Strategy For Stable Voltage Restoration and Optimal Power Sharing in Islanded DC MicrogridsDocument13 pagesDistributed Cooperative Control Strategy For Stable Voltage Restoration and Optimal Power Sharing in Islanded DC MicrogridsSM FerdousNo ratings yet
- Brindha 2018 J. Phys. - Conf. Ser. 1000 012042Document12 pagesBrindha 2018 J. Phys. - Conf. Ser. 1000 012042Siddhanta BoraxNo ratings yet
- Ashabani3Document15 pagesAshabani3happyworryNo ratings yet
- PHD Project Proposals - PEDocument6 pagesPHD Project Proposals - PERifqi Ikhwanuddin100% (1)
- Liu 2019Document14 pagesLiu 2019Ssadik CharadiNo ratings yet
- AC EditedDocument22 pagesAC EditedEmmanuel Ayodele DavidNo ratings yet
- DC Microgrid 2Document7 pagesDC Microgrid 2Jakdaksh HarshNo ratings yet
- Primary Voltage Control of A Single-Phase Inverter Using Linear Quadratic Regulator With IntegratorDocument8 pagesPrimary Voltage Control of A Single-Phase Inverter Using Linear Quadratic Regulator With IntegratorSwagath Kumar PandaNo ratings yet
- SCR IjepesDocument11 pagesSCR IjepeskarthikeyanNo ratings yet
- A Review On DC Microgrid Control TechniquesDocument11 pagesA Review On DC Microgrid Control TechniquesAyman KhalfallaNo ratings yet
- Karami 2020Document10 pagesKarami 2020mohammad omarNo ratings yet
- A Review On Power Quality Issues and Their Mitigation Techniques in Microgrid SystemDocument5 pagesA Review On Power Quality Issues and Their Mitigation Techniques in Microgrid SystemEditor IJTSRDNo ratings yet
- A Modified Voltage Controller With Advanced Droop Control For Load Sharing in Standalone AC Microgrid Under Different Load ConditionsDocument14 pagesA Modified Voltage Controller With Advanced Droop Control For Load Sharing in Standalone AC Microgrid Under Different Load Conditionsnaga_rajNo ratings yet
- 2018 - Stability Analysis and Stabilization Methods of DC Microgrid With Multiple Parallel-Connected DC-DC Converters Loaded by CPLsDocument11 pages2018 - Stability Analysis and Stabilization Methods of DC Microgrid With Multiple Parallel-Connected DC-DC Converters Loaded by CPLsRahul ChakrabortyNo ratings yet
- HVDC Interconnections With SMES Device For PV and Wind Hybrid Power Transmission SystemDocument14 pagesHVDC Interconnections With SMES Device For PV and Wind Hybrid Power Transmission SystemIJRASETPublicationsNo ratings yet
- Energies 15 02295Document19 pagesEnergies 15 02295armandNo ratings yet
- GridDocument6 pagesGridgiongan342No ratings yet
- Power Control of DC Microgrid With Variable Generation and Energy StorageDocument5 pagesPower Control of DC Microgrid With Variable Generation and Energy StorageSEP-PublisherNo ratings yet
- A Grid-Connected Dual Voltage Source InverterWith Power Quality Improvement Features PDFDocument9 pagesA Grid-Connected Dual Voltage Source InverterWith Power Quality Improvement Features PDFChristian Emenike100% (1)
- Adaptive Droop Control Strategy For Load Sharing and Circulating Current Minimization in Low-Voltage Standalone DC MicrogridDocument10 pagesAdaptive Droop Control Strategy For Load Sharing and Circulating Current Minimization in Low-Voltage Standalone DC MicrogridFuture Science AcademyNo ratings yet
- Artigo SubmetidoDocument11 pagesArtigo SubmetidoAdjeferson Custódio GomesNo ratings yet
- Supervisory Control of An Adaptive-Droop Regulated DC Microgrid With Battery Management CapabilityDocument12 pagesSupervisory Control of An Adaptive-Droop Regulated DC Microgrid With Battery Management CapabilityMashood NasirNo ratings yet
- Control Strategy For Modular Multilevel Converter Applied To Active Power Injection and Reactive Power Compensation - Integration in PV MicrogridsDocument11 pagesControl Strategy For Modular Multilevel Converter Applied To Active Power Injection and Reactive Power Compensation - Integration in PV MicrogridsGerardo OsmeNo ratings yet
- A New Design of Control & Power Management Strategies of Hybrid Ac-Dc Microgrids Toward High Power QualityDocument10 pagesA New Design of Control & Power Management Strategies of Hybrid Ac-Dc Microgrids Toward High Power QualityPayalNo ratings yet
- Stability Analysis and Controller Design for DC Microgrids with Constant Power LoadsDocument8 pagesStability Analysis and Controller Design for DC Microgrids with Constant Power Loadspavan gangwarNo ratings yet
- Integrated Full-Bridge-Forward DC-DC Converter For A Residential Microgrid Application PDFDocument13 pagesIntegrated Full-Bridge-Forward DC-DC Converter For A Residential Microgrid Application PDFVamshi KrishnaNo ratings yet
- Overview of The Project 1.1Document44 pagesOverview of The Project 1.1sharmila saravananNo ratings yet
- Hierarchical Control of DC MicrogridDocument5 pagesHierarchical Control of DC MicrogridsudeepNo ratings yet
- Excelente Ev SimulinkDocument11 pagesExcelente Ev SimulinkDEVIL JIM KAZUYANo ratings yet
- Robust Predictive Control of High Density Cascaded DC Voltage Link Power ConvertersDocument12 pagesRobust Predictive Control of High Density Cascaded DC Voltage Link Power ConvertersAnonymous fqHGrbwxeFNo ratings yet
- Optimal Controller Design For Non-Affine Nonlinear Power Systems With Static Var Compensators For Hybrid UAVsDocument11 pagesOptimal Controller Design For Non-Affine Nonlinear Power Systems With Static Var Compensators For Hybrid UAVsPoorani MahesNo ratings yet
- Electrical Power and Energy Systems: Ivan Todorovi Ć, Stevan Grabi Ć, Zoran IvanovićDocument12 pagesElectrical Power and Energy Systems: Ivan Todorovi Ć, Stevan Grabi Ć, Zoran IvanovićtrshaaaNo ratings yet
- Distribution Voltage and Output Power Sharing Control For DC Microgrids Using Fuzzy Control and Gain-SchedulingDocument9 pagesDistribution Voltage and Output Power Sharing Control For DC Microgrids Using Fuzzy Control and Gain-SchedulingIJRASETPublicationsNo ratings yet
- Dual Voltage Source InverterDocument59 pagesDual Voltage Source InverterK GOPALNo ratings yet
- A Hybrid Power Sharing Control To Enhance The Small Signal Stability in DC MicrogridsDocument12 pagesA Hybrid Power Sharing Control To Enhance The Small Signal Stability in DC MicrogridsSM FerdousNo ratings yet
- Energy Storage for Sustainable MicrogridFrom EverandEnergy Storage for Sustainable MicrogridRating: 4 out of 5 stars4/5 (3)
- Ensemble Models For Solar Power Forecasting-A Weather Classification ApproachDocument20 pagesEnsemble Models For Solar Power Forecasting-A Weather Classification ApproachMina Youssef HalimNo ratings yet
- Applied EnergyDocument10 pagesApplied EnergyMina Youssef HalimNo ratings yet
- Parametric Design and Optimization of A Pivoting S-Type Rudder For ContainershipsDocument15 pagesParametric Design and Optimization of A Pivoting S-Type Rudder For ContainershipsMina Youssef HalimNo ratings yet
- Enhancement of Energy, Exergy and Soot Characteristics With The Utilization of MEK in Diesel EngineDocument16 pagesEnhancement of Energy, Exergy and Soot Characteristics With The Utilization of MEK in Diesel EngineMina Youssef HalimNo ratings yet
- A Novel Objective Oriented Methodology For MarineDocument23 pagesA Novel Objective Oriented Methodology For MarineMina Youssef HalimNo ratings yet
- DevelopmentsinElectricGreenMarineShips PDFDocument32 pagesDevelopmentsinElectricGreenMarineShips PDFMina Youssef HalimNo ratings yet
- Modeling of IGFC System: CO2 Removal From The Gas Streams, Using Membrane ReactorsDocument74 pagesModeling of IGFC System: CO2 Removal From The Gas Streams, Using Membrane ReactorsMina Youssef HalimNo ratings yet
- A Novel Objective Oriented Methodology For MarineDocument23 pagesA Novel Objective Oriented Methodology For MarineMina Youssef HalimNo ratings yet
- Energies: ANN-Based Prediction and Optimization of Cooling System in Hotel RoomsDocument21 pagesEnergies: ANN-Based Prediction and Optimization of Cooling System in Hotel RoomsMina Youssef HalimNo ratings yet
- Comparison of Engine Power Correction Factors For Varying Atmospheric ConditionsDocument7 pagesComparison of Engine Power Correction Factors For Varying Atmospheric Conditionsscribd_20_emmanuelfaure100% (1)
- 63305Document18 pages63305Mina Youssef HalimNo ratings yet
- (20837429 - Polish Maritime Research) CFD and FEM Model of An Underwater Vehicle PropellerDocument6 pages(20837429 - Polish Maritime Research) CFD and FEM Model of An Underwater Vehicle PropellerMina Youssef HalimNo ratings yet
- 2013 - A CFD (Computational Fluid Dynamics) Study For Optimization of GasDocument13 pages2013 - A CFD (Computational Fluid Dynamics) Study For Optimization of GasMina Youssef HalimNo ratings yet
- Dual Fuel Engine Development and DesignDocument40 pagesDual Fuel Engine Development and DesignHenrique MorgadoNo ratings yet
- **Document14 pages**Mina Youssef HalimNo ratings yet
- 2009 Wartsila Dual Fuel LNGC PresentationDocument39 pages2009 Wartsila Dual Fuel LNGC PresentationsarihaddusNo ratings yet
- **Document14 pages**Mina Youssef HalimNo ratings yet
- PEM Fuel Cell Optimization with GADocument5 pagesPEM Fuel Cell Optimization with GAMina Youssef HalimNo ratings yet
- AIR FLOW AND CHARGE MOTION STUDY OF ENGINE INTAKE PORTDocument9 pagesAIR FLOW AND CHARGE MOTION STUDY OF ENGINE INTAKE PORTAshokNo ratings yet
- Matlab MiniDocument61 pagesMatlab MiniSsb SalehNo ratings yet
- SO2 Cal PDFDocument16 pagesSO2 Cal PDFMina Youssef HalimNo ratings yet
- Bayesian NetworksDocument6 pagesBayesian NetworksKonrad Witowski-JeleńNo ratings yet
- WanMansor Colostate 0053A 12810Document176 pagesWanMansor Colostate 0053A 12810Mina Youssef HalimNo ratings yet
- 1968 - Medium ' Speed Diesel Engine NoiseDocument24 pages1968 - Medium ' Speed Diesel Engine NoiseMina Youssef HalimNo ratings yet
- 1398Document9 pages1398Kongala Vamsi KrishnaNo ratings yet
- 2018 - Optimization of Performance and Operational Cost For A Dual Mode Dieselnatural Gas RCCI and Diesel Combustion EngineDocument13 pages2018 - Optimization of Performance and Operational Cost For A Dual Mode Dieselnatural Gas RCCI and Diesel Combustion EngineMina Youssef HalimNo ratings yet
- Coal Notice 1 PDFDocument1 pageCoal Notice 1 PDFMina Youssef HalimNo ratings yet
- CFD Modeling Generates Clean Power from Water FlowDocument10 pagesCFD Modeling Generates Clean Power from Water FlowMina Youssef HalimNo ratings yet
- Benvenuto 2002Document11 pagesBenvenuto 2002Mina Youssef HalimNo ratings yet
- C 60 A/XF: The Siam Refractory Industry Co.,LtdDocument1 pageC 60 A/XF: The Siam Refractory Industry Co.,LtdGaluhNo ratings yet
- Toyota Camry ANCAP PDFDocument2 pagesToyota Camry ANCAP PDFcarbasemyNo ratings yet
- Chapter 5Document31 pagesChapter 5Marvin VinasNo ratings yet
- Lun Mapping DisksDocument11 pagesLun Mapping DisksKarn GusainNo ratings yet
- Vidya Mandir Public School Class 11 Computer Science String Assignment SolutionsDocument5 pagesVidya Mandir Public School Class 11 Computer Science String Assignment SolutionsArun SharmaNo ratings yet
- Enterprise Architecture Roadmap: Sustain EA Best PracticesDocument1 pageEnterprise Architecture Roadmap: Sustain EA Best PracticesChen YooNo ratings yet
- Dyno InstructionsDocument2 pagesDyno InstructionsAlicia CarrNo ratings yet
- Piperack Design PhiloshipyDocument10 pagesPiperack Design PhiloshipyGautam PaulNo ratings yet
- Alejandro D. Ramos - Tourism Development Economics, Management - 2008 PDFDocument258 pagesAlejandro D. Ramos - Tourism Development Economics, Management - 2008 PDFSanjiv RudrakarNo ratings yet
- Six Sigma Statistical Methods Using Minitab 13 Manual4754Document95 pagesSix Sigma Statistical Methods Using Minitab 13 Manual4754vinaytoshchoudharyNo ratings yet
- MA 7 TranscriptDocument82 pagesMA 7 TranscriptBob AndrepontNo ratings yet
- Xpand!2 - User Guide - V1.1Document18 pagesXpand!2 - User Guide - V1.1JamesNo ratings yet
- PDFDocument42 pagesPDFDanh MolivNo ratings yet
- A4931 DatasheetDocument12 pagesA4931 DatasheetDiego HernandezNo ratings yet
- Sleep Hygiene Sleep QualityandDocument8 pagesSleep Hygiene Sleep QualityandVriddhi AgrawalNo ratings yet
- Very Basic GSADocument46 pagesVery Basic GSATim ChongNo ratings yet
- Sophiajurgens Resume EdtDocument2 pagesSophiajurgens Resume Edtapi-506489381No ratings yet
- A Fully Coupled 3-D Mixed Finite Element Model of Biot ConsolidationDocument18 pagesA Fully Coupled 3-D Mixed Finite Element Model of Biot ConsolidationTantai RakthaijungNo ratings yet
- Identifying The Orders of AR and MA Terms in An ARIMA ModelDocument11 pagesIdentifying The Orders of AR and MA Terms in An ARIMA ModelNeha GillNo ratings yet
- IPPD Presentation Roll OutDocument34 pagesIPPD Presentation Roll OutGracel Alingod Galay100% (1)
- Logix5000 Control Systems: Connect Kinetix 350 Drives Over An Ethernet/Ip NetworkDocument50 pagesLogix5000 Control Systems: Connect Kinetix 350 Drives Over An Ethernet/Ip NetworkAlan Ruiz CortezNo ratings yet
- R7 Injection CheatSheet.v1Document1 pageR7 Injection CheatSheet.v1qweNo ratings yet
- The Effect of Electronic Word of Mouth On Sales A Meta-Analytic Review of Platform Product and Metric FactorsDocument52 pagesThe Effect of Electronic Word of Mouth On Sales A Meta-Analytic Review of Platform Product and Metric FactorsHoda El HALABINo ratings yet
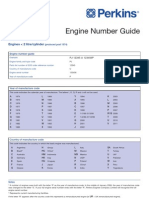
- Perkins Engine Number Guide PP827Document6 pagesPerkins Engine Number Guide PP827Muthu Manikandan100% (1)
- Management Science PDFDocument131 pagesManagement Science PDFAngela Lei SanJuan BucadNo ratings yet
- UCT APM M2 U1 - TP Leadership QuestionnaireDocument4 pagesUCT APM M2 U1 - TP Leadership QuestionnaireLincolyn MoyoNo ratings yet
- Part 1Document3 pagesPart 1Jester NavarquezNo ratings yet
- National Institute of Technology Calicut: Department of Computer Science and EngineeringDocument8 pagesNational Institute of Technology Calicut: Department of Computer Science and EngineeringArun ManuNo ratings yet
- Hanix h15b 2 h15b Plus 2 Service Manual Sept 09Document10 pagesHanix h15b 2 h15b Plus 2 Service Manual Sept 09vickie100% (41)
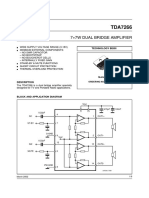
- Tda7266 PDFDocument9 pagesTda7266 PDFRenato HernandezNo ratings yet