You might also like
- Book Index The Art of Heavy TransportDocument6 pagesBook Index The Art of Heavy TransportHermon Pakpahan50% (2)
- Rigging Engineering Basic Sample CalculationsDocument24 pagesRigging Engineering Basic Sample CalculationsAmeerUlHaq87% (15)
- Cargo Securing ManualDocument27 pagesCargo Securing Manualrsalvasan100% (1)
- Asme B30.26 2020Document54 pagesAsme B30.26 2020Hermon Pakpahan75% (4)
- Asme B30.26 2020Document54 pagesAsme B30.26 2020Hermon Pakpahan75% (4)
- Asme B30.10-2019Document28 pagesAsme B30.10-2019Hermon Pakpahan50% (2)
- Tipping LineDocument17 pagesTipping LineHermon PakpahanNo ratings yet
- Mechanics: Problems in Undergraduate PhysicsFrom EverandMechanics: Problems in Undergraduate PhysicsRating: 3.5 out of 5 stars3.5/5 (2)
- Wave Calculations Speed Frequency WavelengthDocument3 pagesWave Calculations Speed Frequency WavelengthTrixia AlbaNo ratings yet
- Safety Documents, Templates, FormsDocument14 pagesSafety Documents, Templates, FormsRochdi BahiriNo ratings yet
- Solid State CircuitsDocument472 pagesSolid State CircuitsCruise_IceNo ratings yet
- 3 D Modelling and Finite Element Analysis of Eot CraneDocument4 pages3 D Modelling and Finite Element Analysis of Eot CraneKenneth ShumNo ratings yet
- Solar PV System SizingDocument11 pagesSolar PV System SizingSachin V Tiwade100% (2)
- Finite Element Analysis of The Tower CraDocument4 pagesFinite Element Analysis of The Tower CraMadhu KolatiNo ratings yet
- Forum Diskusi 5-1 (Magnetic Field and Magnetic Force)Document4 pagesForum Diskusi 5-1 (Magnetic Field and Magnetic Force)Reyhan Julianto PribadiNo ratings yet
- Aht PDF PreviewDocument12 pagesAht PDF PreviewHermon Pakpahan100% (1)
- Qian (2017) - Modeling and Analysis of Outrigger Reaction Forces of Hydraulic Mobile CraneDocument7 pagesQian (2017) - Modeling and Analysis of Outrigger Reaction Forces of Hydraulic Mobile CraneGogyNo ratings yet
- Predicting and Measuring Vertical Track Displacements On Soft SubgradesDocument8 pagesPredicting and Measuring Vertical Track Displacements On Soft Subgradesjoelrive10No ratings yet
- Laterally Loaded Piles ResearchDocument12 pagesLaterally Loaded Piles Researchdr100% (1)
- 25854224Document5 pages25854224Fajar SodiqNo ratings yet
- Transfer Station DesignDocument5 pagesTransfer Station DesignJakesNo ratings yet
- Chain & Chain SlingsDocument30 pagesChain & Chain Slingsgopi_fame11No ratings yet
- Low Bed Trailer.Document1 pageLow Bed Trailer.Hermon Pakpahan100% (1)
- Int 2016 01 - 09Document25 pagesInt 2016 01 - 09CHRISTIAN LOPEZ FLOREZ100% (2)
- Dynamics and Control of Cranes A ReviewDocument54 pagesDynamics and Control of Cranes A ReviewParthPatelNo ratings yet
- Dynamics of CranesDocument46 pagesDynamics of CranesGogyNo ratings yet
- 00 Practice 2 Bridge CraneDocument14 pages00 Practice 2 Bridge CraneMarco NeveNo ratings yet
- Dynamic Responses of An Overhead Crane's BeamDocument15 pagesDynamic Responses of An Overhead Crane's BeamramiNo ratings yet
- Chapter 1-3 PDFDocument27 pagesChapter 1-3 PDFRyle AquinoNo ratings yet
- 1.0 Design InformationDocument24 pages1.0 Design InformationMuhammad Wazim AkramNo ratings yet
- Deformation Analysis of A Gantry Crane During Workload: January 2013Document6 pagesDeformation Analysis of A Gantry Crane During Workload: January 2013'NovarioAdiguna'No ratings yet
- Modeling of Miner Track System During Steering MotionDocument9 pagesModeling of Miner Track System During Steering MotionOmbeni JohnNo ratings yet
- Modeling and Energy-Based Sway Reduction Control For Tower Crane Systems With Double-Pendulum and Spherical-Pendulum EffectsDocument10 pagesModeling and Energy-Based Sway Reduction Control For Tower Crane Systems With Double-Pendulum and Spherical-Pendulum EffectsVictor Julián Fernández CarrazanaNo ratings yet
- Optimizing Service Life of Conveyor Belts While TRDocument8 pagesOptimizing Service Life of Conveyor Belts While TRGijoNo ratings yet
- Hydrodynamic Derivatives - Inoue - HiranoDocument14 pagesHydrodynamic Derivatives - Inoue - HiranoEdsonNo ratings yet
- Overhead Travelling Crane Construction DeflectionDocument8 pagesOverhead Travelling Crane Construction DeflectionKundan PrasadNo ratings yet
- Linier Ship Dynamic PaperDocument10 pagesLinier Ship Dynamic PaperAjib SetiawanNo ratings yet
- lateral stability telehandlerDocument7 pageslateral stability telehandlerReginald D'SouzaNo ratings yet
- Oscillation Suppressing For An Energy Efficient Bridge Crane Using Input ShapingDocument5 pagesOscillation Suppressing For An Energy Efficient Bridge Crane Using Input ShapingGogyNo ratings yet
- How To Calculate Crane ReactionsDocument11 pagesHow To Calculate Crane ReactionsAhmed ZakyNo ratings yet
- Eot Crane During SeismicDocument12 pagesEot Crane During SeismicboyzesNo ratings yet
- Suzuki2019 Article ElasticResponseOfALight-weightDocument14 pagesSuzuki2019 Article ElasticResponseOfALight-weightNo email HAHANo ratings yet
- E3sconf Gceece2021 02041Document5 pagesE3sconf Gceece2021 02041dejfioefNo ratings yet
- Determination of Dynamic P-Y Curves For Pile Foundations Under Seismic LoadingDocument8 pagesDetermination of Dynamic P-Y Curves For Pile Foundations Under Seismic LoadingSocio JiwapatriaNo ratings yet
- mtm-2016-8-12 TRUCK MOUNTED CRANES DURING LOAD LIFTING - DYNAMIC ANALYSIS AND REGULATION USING MODELLING AND SIMULATIONSDocument4 pagesmtm-2016-8-12 TRUCK MOUNTED CRANES DURING LOAD LIFTING - DYNAMIC ANALYSIS AND REGULATION USING MODELLING AND SIMULATIONSHui ChenNo ratings yet
- 05 Constructing Load Transfer QZ and TZ Curves From Pile Loading Tests For 3D FEA AnalysisDocument11 pages05 Constructing Load Transfer QZ and TZ Curves From Pile Loading Tests For 3D FEA AnalysislingamkumarNo ratings yet
- Marine LiftingDocument17 pagesMarine LiftingMarian LazarNo ratings yet
- SLOPESTABILITYUNDERDYNAMICLOADING Ker GEOREKS 14Document9 pagesSLOPESTABILITYUNDERDYNAMICLOADING Ker GEOREKS 14aji raNo ratings yet
- Response of Stiff Piles To Random Two-Way Lateral LoadingDocument7 pagesResponse of Stiff Piles To Random Two-Way Lateral LoadingKittipob M CharoensookNo ratings yet
- Final ManuscriptDocument27 pagesFinal ManuscriptIbrahim KarasakızNo ratings yet
- Numerical Modelling of I-Beam Jib Crane LoadsDocument7 pagesNumerical Modelling of I-Beam Jib Crane LoadsDuy TrươngNo ratings yet
- The Study of Lateral Torsional Buckling Behaviour of Beam With Trapezoid Web Steel Section by Experimental PDFDocument9 pagesThe Study of Lateral Torsional Buckling Behaviour of Beam With Trapezoid Web Steel Section by Experimental PDFyacino30No ratings yet
- Wu 2016Document6 pagesWu 2016Soledad AceitunoNo ratings yet
- Reliability-Based Design of RC Water Tank Structures Under Seismic ActionDocument14 pagesReliability-Based Design of RC Water Tank Structures Under Seismic ActionRAKSHITH NNo ratings yet
- Application of Intelligent Sliding Mode Control With Moving Sliding Surface For Overhead CranesDocument11 pagesApplication of Intelligent Sliding Mode Control With Moving Sliding Surface For Overhead CranesMohammed MohammedNo ratings yet
- STUDY OF DIFFERENT LOADING CONDITIONS ON BRIDGE SUPERSTRUCTUREDocument30 pagesSTUDY OF DIFFERENT LOADING CONDITIONS ON BRIDGE SUPERSTRUCTURERohit KumarNo ratings yet
- Jmse 09 00235 v2Document22 pagesJmse 09 00235 v2aekockautNo ratings yet
- J Tws 2014 09 009 PDFDocument9 pagesJ Tws 2014 09 009 PDFHisham SyedNo ratings yet
- Dynamics and Swing Control of Double-Pendulum Bridge Cranes With Distributed-Mass BeamsDocument10 pagesDynamics and Swing Control of Double-Pendulum Bridge Cranes With Distributed-Mass BeamsGogyNo ratings yet
- Displacement To Mobilize Toe in High StrainDocument22 pagesDisplacement To Mobilize Toe in High StrainObaid Ur RehmanNo ratings yet
- RC 2, CHPTR 2Document9 pagesRC 2, CHPTR 2jebril yusufNo ratings yet
- Chhoeung 2019 J. Phys. Conf. Ser. 1357 012028Document10 pagesChhoeung 2019 J. Phys. Conf. Ser. 1357 012028Dinh Nguyen DaoNo ratings yet
- 2.mathematical Model For The Manoeuvring Ship in Shalow WaterDocument12 pages2.mathematical Model For The Manoeuvring Ship in Shalow WaterЮра ОксамытныйNo ratings yet
- Zhao 2016Document6 pagesZhao 2016Research1 amtdcNo ratings yet
- ISSW 2014 s8-p03Document5 pagesISSW 2014 s8-p03anjago824No ratings yet
- Optimization of Dynamic Parameters For A Traction-Type Passenger Elevator Using A Dynamic Byte Coding Genetic AlgorithmDocument14 pagesOptimization of Dynamic Parameters For A Traction-Type Passenger Elevator Using A Dynamic Byte Coding Genetic AlgorithmVô TâmNo ratings yet
- The Design and Analysis On Intensity of Anti-Roll Bar On 100% Low-Floor Light Rail VehicleDocument5 pagesThe Design and Analysis On Intensity of Anti-Roll Bar On 100% Low-Floor Light Rail VehicleCarlos AlonsoNo ratings yet
- Bridges For High Speed RailwaysDocument10 pagesBridges For High Speed RailwaysBesim GülcüNo ratings yet
- 16 - Inverted Pendulum Control System Based On GA OptimizationDocument4 pages16 - Inverted Pendulum Control System Based On GA Optimizationahmed.almohammedNo ratings yet
- Portal Frame Bridge - Simple Statics-LibreDocument22 pagesPortal Frame Bridge - Simple Statics-LibrePunithan PunithanNo ratings yet
- Development of An ROV Operated Both As Towed and Self-Propulsive VehicleDocument43 pagesDevelopment of An ROV Operated Both As Towed and Self-Propulsive VehicleAntonio Carlos Bana ChiellaNo ratings yet
- Evaluation of Lateral Interpretation Criteria For Drilled Shaft Capacity in GravelsDocument13 pagesEvaluation of Lateral Interpretation Criteria For Drilled Shaft Capacity in GravelsAbdesselem LaouedjNo ratings yet
- Elastic Buckling of Single-Stepped Columns With End and Intermediate Axial LoadsDocument13 pagesElastic Buckling of Single-Stepped Columns With End and Intermediate Axial Loadsmaximo.adhavNo ratings yet
- Dynamical Actions On Bridge Decks Due To A Train of VehiclesDocument10 pagesDynamical Actions On Bridge Decks Due To A Train of VehiclesJosé Guilherme Santos da SilvaNo ratings yet
- Designing of Reinforce Concrete Deck Slab Bridge With Aashto (LRFD) Design SpecificationDocument54 pagesDesigning of Reinforce Concrete Deck Slab Bridge With Aashto (LRFD) Design SpecificationTharach JanesuapasaereeNo ratings yet
- Numerical Study For Soil-Spring Stiffness of Pile Group: September 2015Document8 pagesNumerical Study For Soil-Spring Stiffness of Pile Group: September 2015سارة المالكيNo ratings yet
- ChapterDocument12 pagesChapterAtalelew ZeruNo ratings yet
- Third EditonDocument15 pagesThird EditonMohamedSaidNo ratings yet
- Mobile Crane Operator Exam OutlineDocument1 pageMobile Crane Operator Exam OutlineHermon PakpahanNo ratings yet
- Barnhart Moving TierneyDocument42 pagesBarnhart Moving TierneyHermon PakpahanNo ratings yet
- Martin Jones: Projects / Marine Logistics / Time CriticalDocument39 pagesMartin Jones: Projects / Marine Logistics / Time CriticalHermon PakpahanNo ratings yet
- ALE Newsletter - SinglesLRDocument12 pagesALE Newsletter - SinglesLRHermon PakpahanNo ratings yet
- 2018 Product CatalogDocument23 pages2018 Product CatalogKien Trung NguyenNo ratings yet
- DWG Add Fiberflow Pma Civil Bagian 1Document17 pagesDWG Add Fiberflow Pma Civil Bagian 1Hermon PakpahanNo ratings yet
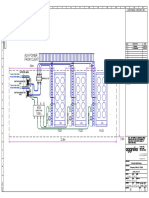
- Temporary Chiller 3x 750kW Site LayoutDocument1 pageTemporary Chiller 3x 750kW Site LayoutHermon PakpahanNo ratings yet
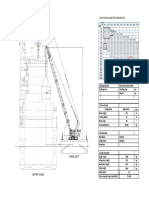
- Liftingplan Interlink Model Crane 80 CrawlerDocument1 pageLiftingplan Interlink Model Crane 80 CrawlerHermon PakpahanNo ratings yet
- Crosby Sling CalculatorDocument4 pagesCrosby Sling CalculatorHermon PakpahanNo ratings yet
- Loads Dim 87014 7Document4 pagesLoads Dim 87014 7Hermon PakpahanNo ratings yet
- Low Bed Trailer Ultimate GuideDocument69 pagesLow Bed Trailer Ultimate GuidekoushkiNo ratings yet
- c4 Teodor Kula Esa LogistikaDocument26 pagesc4 Teodor Kula Esa LogistikaHermon PakpahanNo ratings yet
- Svenborg Disc BrakesDocument112 pagesSvenborg Disc BrakesvsarrNo ratings yet
- ResumeeeDocument2 pagesResumeeeTR KumaranNo ratings yet
- Aakash Rank Booster Test Series For NEET-2020Document17 pagesAakash Rank Booster Test Series For NEET-2020Deepak PatelNo ratings yet
- Synchronous-Reference-Frame-Based Control Method For UPQC Under Unbalanced and Distorted Load ConditionsDocument9 pagesSynchronous-Reference-Frame-Based Control Method For UPQC Under Unbalanced and Distorted Load Conditionsrmsharma1970No ratings yet
- Unit Three Suggested Topics For ReviewDocument2 pagesUnit Three Suggested Topics For Reviewapi-237737577No ratings yet
- 1478176003198-EIE&ECE StreamDocument13 pages1478176003198-EIE&ECE StreamVikasSainiNo ratings yet
- SMMS-7 - Benchmarking and USP.Document19 pagesSMMS-7 - Benchmarking and USP.Tín Nguyễn ThànhNo ratings yet
- June 2016 (IAL) QP - Unit 3 Edexcel Physics A-LevelDocument16 pagesJune 2016 (IAL) QP - Unit 3 Edexcel Physics A-LevelsdasdasNo ratings yet
- 6SL3210 1PE21 1AL0 Datasheet enDocument2 pages6SL3210 1PE21 1AL0 Datasheet enplavi10No ratings yet
- Experiment - 1 Voltage To Current ConverterDocument7 pagesExperiment - 1 Voltage To Current Converterbharath malothNo ratings yet
- Mathematics exam questions on matrices, integration, probability and statisticsDocument7 pagesMathematics exam questions on matrices, integration, probability and statisticsjokydin92No ratings yet
- Rolling Ball Viscometer BrochureDocument2 pagesRolling Ball Viscometer BrochureHassanNo ratings yet
- Fisica Potencial Electrico PDFDocument14 pagesFisica Potencial Electrico PDFJarod ZamoraNo ratings yet
- Solar farm underground cable planDocument1 pageSolar farm underground cable planJuan Carlos CastroNo ratings yet
- Paper TLF LodewijksDocument7 pagesPaper TLF LodewijksYao LuNo ratings yet
- 6.protection Components RelaysDocument66 pages6.protection Components RelaysRian KamekNo ratings yet
- Trustworthy GO System for HydrogenDocument7 pagesTrustworthy GO System for HydrogenTarek OsmanNo ratings yet
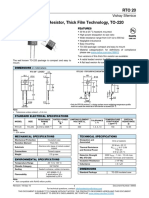
- Vishay Sfernice: FeaturesDocument5 pagesVishay Sfernice: FeaturesteoilcaNo ratings yet
- 111年下A卷題庫Document10 pages111年下A卷題庫陳奕安No ratings yet
- DVR Dstatcom Detailed InformationDocument17 pagesDVR Dstatcom Detailed InformationSuneel Kumar MauryaNo ratings yet
- Experiment 6 and Experiment 7Document5 pagesExperiment 6 and Experiment 7Gebre TensayNo ratings yet
- Calalang, Louise Anne E. EXAM # 1-SE533 AT P. 164 Single Degree of Freedom PropertiesDocument1,713 pagesCalalang, Louise Anne E. EXAM # 1-SE533 AT P. 164 Single Degree of Freedom PropertiesRenzel EstebanNo ratings yet
- Rme Pec Module 3 - Sept 2015Document2 pagesRme Pec Module 3 - Sept 2015Bianca SañezNo ratings yet
- BLDEA’S VACHANA PITAMAHA DR. P.G HALAKATTI COLLEGE ZERO ENERGY BUILDING SEMINARDocument15 pagesBLDEA’S VACHANA PITAMAHA DR. P.G HALAKATTI COLLEGE ZERO ENERGY BUILDING SEMINARMuhammad MangoliNo ratings yet
- Magneto-Optical Current Transformer: Vignan'S Institute of Information Technology, DuvvadaDocument14 pagesMagneto-Optical Current Transformer: Vignan'S Institute of Information Technology, DuvvadaKaruna Reddy Yennapusa50% (2)