You might also like
- Control of An Automotive Electromagnetic Suspension System: T.P.J. Van Der Sande D&C 2011.016Document94 pagesControl of An Automotive Electromagnetic Suspension System: T.P.J. Van Der Sande D&C 2011.016Marcu SorinNo ratings yet
- Export Car Sim VariableDocument19 pagesExport Car Sim Variabledanuega1No ratings yet
- Sensor Fusion of Differential Gps and Inertial Measuring Unit To Measure State of A Test VehicleDocument216 pagesSensor Fusion of Differential Gps and Inertial Measuring Unit To Measure State of A Test VehicleRăzvan PopaNo ratings yet
- Body ThesisDocument408 pagesBody ThesissridharanNo ratings yet
- Design of Slip Based Active Braking and Traction Control Sytem For The Electric Vehicle QBEAK PDFDocument157 pagesDesign of Slip Based Active Braking and Traction Control Sytem For The Electric Vehicle QBEAK PDFkomklaveNo ratings yet
- Modeling and Simulation of Faults in DSDocument9 pagesModeling and Simulation of Faults in DSrupamandalNo ratings yet
- Friction Modelling and Parameter Estimation For Hydraulic Asymmetrical CylindersDocument110 pagesFriction Modelling and Parameter Estimation For Hydraulic Asymmetrical CylindersSakuraLeoNo ratings yet
- Investigation On Effect of Hump On A Vehicle Suspension For The Comfortable RideDocument6 pagesInvestigation On Effect of Hump On A Vehicle Suspension For The Comfortable RideanilmechNo ratings yet
- Understanding The Limitations of Different Vehicle Models For Roll Dynamics StudiesDocument27 pagesUnderstanding The Limitations of Different Vehicle Models For Roll Dynamics StudiesAntonio Navarrete0% (1)
- Keyboard Shortcuts LinuxDocument1 pageKeyboard Shortcuts LinuxlerinaNo ratings yet
- 2022 Next Generation Integrated Vehicle Dynamics and ControlsDocument209 pages2022 Next Generation Integrated Vehicle Dynamics and Controls杨旸No ratings yet
- UdacityCourse Lesson 1 2 3 4Document145 pagesUdacityCourse Lesson 1 2 3 4krishna chaitanya100% (1)
- Vehicle Dynamics TheoryAJM PDFDocument126 pagesVehicle Dynamics TheoryAJM PDFSrinivasarao YenigallaNo ratings yet
- Power Transmission System With Chain and Two Sprockets - MATLAB - MathWorks IndiaDocument5 pagesPower Transmission System With Chain and Two Sprockets - MATLAB - MathWorks IndiaViral NaikNo ratings yet
- Vehicle Dynamics Tutorial - 1Document46 pagesVehicle Dynamics Tutorial - 1Girish ChandranNo ratings yet
- Improvement of Strain Gauges Micro-Forces Measurement Using Kalman Optimal FilteringOriginal Research ArticleDocument6 pagesImprovement of Strain Gauges Micro-Forces Measurement Using Kalman Optimal FilteringOriginal Research ArticlehmtuanbkNo ratings yet
- Demonstration OF Braking SYSTEM of An EngineDocument13 pagesDemonstration OF Braking SYSTEM of An EngineKryptonNo ratings yet
- Dynamic Lumbar Support On Dynamic Seat, Function PDFDocument1 pageDynamic Lumbar Support On Dynamic Seat, Function PDFMaksNo ratings yet
- 802.11a and 802.16a SimulinkDocument13 pages802.11a and 802.16a SimulinkAkshay KarveNo ratings yet
- Workshop 2Document149 pagesWorkshop 2JOEL JO THOMASNo ratings yet
- Editors' Perspectives:: Road Vehicle Suspension Design, Dynamics, and ControlDocument34 pagesEditors' Perspectives:: Road Vehicle Suspension Design, Dynamics, and ControlTech DudeNo ratings yet
- 4.1 - Final - Troubleshooting TheoryDocument3 pages4.1 - Final - Troubleshooting TheoryUMAR TARIQNo ratings yet
- Design and Implementation of Data Scrambler & Descrambler System Using VHDLDocument6 pagesDesign and Implementation of Data Scrambler & Descrambler System Using VHDLEditor IJRITCC100% (1)
- Active Suspension Control of Ground VehicleDocument6 pagesActive Suspension Control of Ground VehicleSanjay MehrishiNo ratings yet
- Types of Automotive Braking Systems: Brake ComponentsDocument5 pagesTypes of Automotive Braking Systems: Brake ComponentsAsmaa Ahmad SharawyNo ratings yet
- Mathematical Modeling of The Electric Drive Train of The Sports CarDocument10 pagesMathematical Modeling of The Electric Drive Train of The Sports CarJuraj MadarásNo ratings yet
- Powertrain IntegrationDocument4 pagesPowertrain IntegrationmenonmoonNo ratings yet
- Euro Ncap Aeb Test Protocol v11 PDFDocument31 pagesEuro Ncap Aeb Test Protocol v11 PDFRTCNNo ratings yet
- Virtualizing The TCU of BMW's 8 Speed TransmissionDocument7 pagesVirtualizing The TCU of BMW's 8 Speed TransmissionSergiu EneNo ratings yet
- LINDocument44 pagesLINRohit D. ChaudhariNo ratings yet
- HevDocument14 pagesHevjungdjudfNo ratings yet
- Volkswagen Group Powertrain StrategyDocument29 pagesVolkswagen Group Powertrain Strategysid_nelsonNo ratings yet
- Automotive Systems: Vehicle Performances Parameters PFI Gasoline EnginesDocument36 pagesAutomotive Systems: Vehicle Performances Parameters PFI Gasoline EnginesAmanda MoraraNo ratings yet
- 01 BOOST Release NotesDocument17 pages01 BOOST Release NoteshenevilNo ratings yet
- Car Braking SystemsDocument23 pagesCar Braking SystemsStefan KostadinovićNo ratings yet
- Finite State MachineDocument20 pagesFinite State MachineClyde CauchiNo ratings yet
- Embedded Systems Basics - Lecture Notes - DrJineshDocument114 pagesEmbedded Systems Basics - Lecture Notes - DrJineshJineshNo ratings yet
- Unit 2-AEEDocument128 pagesUnit 2-AEEChidananda BasavannaNo ratings yet
- Finite Element Analysis Based On Stochastic Hamilton Variational PrincipleDocument10 pagesFinite Element Analysis Based On Stochastic Hamilton Variational PrincipleYoyok Setyo100% (1)
- Harsh Kothari's Hybrid EVDocument7 pagesHarsh Kothari's Hybrid EVHARSH JAINNo ratings yet
- Active Suspension System of Quarter CarDocument70 pagesActive Suspension System of Quarter CarMarcu SorinNo ratings yet
- Fundamentals of AutomobileDocument1 pageFundamentals of AutomobilesrknotesNo ratings yet
- Caliper Brake PDFDocument1 pageCaliper Brake PDFJhun AquinoNo ratings yet
- 101 Ways Extract Modal Parameters Which Is One Me PDFDocument13 pages101 Ways Extract Modal Parameters Which Is One Me PDFValentino de GeorgeNo ratings yet
- Paddle Shifter PDFDocument32 pagesPaddle Shifter PDFsimran singhNo ratings yet
- Simulation of Control System For A Half Car Model Suspension System For Passenger Car Application by Design An LQR ControllerDocument8 pagesSimulation of Control System For A Half Car Model Suspension System For Passenger Car Application by Design An LQR ControllerInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Wiring Diagram: Volvo Xc90Document260 pagesWiring Diagram: Volvo Xc90Ernest WoreczekNo ratings yet
- CASdatasets Manual PDFDocument102 pagesCASdatasets Manual PDFPatrick MugoNo ratings yet
- PWM Based DC Motor Speed Control Using MicrocontrollerDocument8 pagesPWM Based DC Motor Speed Control Using MicrocontrollertazebNo ratings yet
- Diagnosis For in Vehicle NetworksDocument26 pagesDiagnosis For in Vehicle NetworksSayyedNo ratings yet
- SSP 275 Phaeton Air SuspensionDocument17 pagesSSP 275 Phaeton Air Suspensionภูเก็ต เป็นเกาะNo ratings yet
- Hybrid VehiclesDocument14 pagesHybrid VehiclesCosmin Mihai KiritaNo ratings yet
- Analysis of Automobile SuspensionDocument13 pagesAnalysis of Automobile SuspensionAfeez AzizNo ratings yet
- Active Suspension: Presented by XXXXXXXDocument29 pagesActive Suspension: Presented by XXXXXXXGaurav KumarNo ratings yet
- Matlab Tutorial PDFDocument12 pagesMatlab Tutorial PDFm6muthiNo ratings yet
- Automated Software Testing Interview Questions You'll Most Likely Be Asked: Job Interview Questions SeriesFrom EverandAutomated Software Testing Interview Questions You'll Most Likely Be Asked: Job Interview Questions SeriesNo ratings yet
- Fully Autonomous Vehicles: Visions of the future or still reality?From EverandFully Autonomous Vehicles: Visions of the future or still reality?No ratings yet
- Social Force: Model For Pedestrian DynamicsDocument5 pagesSocial Force: Model For Pedestrian DynamicsHermosillaNo ratings yet
- Iv 2012Document7 pagesIv 2012Vikas LakhmaniNo ratings yet
- On Maximizing Lateral Clearance of An Autonomous Vehicle in Urban EnvironmentsDocument7 pagesOn Maximizing Lateral Clearance of An Autonomous Vehicle in Urban EnvironmentsSumit MishraNo ratings yet
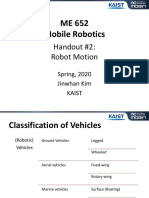
- ME 652 Mobile Robotics: Handout #2: Robot MotionDocument30 pagesME 652 Mobile Robotics: Handout #2: Robot MotionSumit MishraNo ratings yet
- ME 652 Mobile Robotics: Handout #1: Course IntroductionDocument32 pagesME 652 Mobile Robotics: Handout #1: Course IntroductionSumit MishraNo ratings yet
- 2020 ME652 HO 03 VehicleDynamicsDocument30 pages2020 ME652 HO 03 VehicleDynamicsSumit MishraNo ratings yet
- ME 652 Mobile Robotics: Handout #1: Course IntroductionDocument32 pagesME 652 Mobile Robotics: Handout #1: Course IntroductionSumit MishraNo ratings yet
- ME 652 Mobile Robotics: Handout #2: Robot MotionDocument30 pagesME 652 Mobile Robotics: Handout #2: Robot MotionSumit MishraNo ratings yet
- Dom SolvedDocument49 pagesDom SolvedRAJESH. RNo ratings yet
- Torque Vectoring With A Feedback and Feed Forward Controller-Applied To A Through The Road Hybrid Electric VehicleDocument6 pagesTorque Vectoring With A Feedback and Feed Forward Controller-Applied To A Through The Road Hybrid Electric Vehiclesmmj2010No ratings yet
- Upsc Physics Optional Tutorial Sheets PDFDocument51 pagesUpsc Physics Optional Tutorial Sheets PDFpankaj ahlawatNo ratings yet
- D. B. Singh - Master Resource Book in JEE Main Physics-Arihant (2020)Document1,425 pagesD. B. Singh - Master Resource Book in JEE Main Physics-Arihant (2020)Rounak Saha83% (6)
- Vibration and Shock Isolation-Advanced Antivibration ComponentsDocument55 pagesVibration and Shock Isolation-Advanced Antivibration Componentshiginio.moro6182No ratings yet
- 1101 B.P.S. XI Physics Worksheet PDFDocument31 pages1101 B.P.S. XI Physics Worksheet PDFPraveen MaramNo ratings yet
- Kesten CH 8 10.21Document58 pagesKesten CH 8 10.21Miiss PoojaNo ratings yet
- Sheet 2-3-4-5Document14 pagesSheet 2-3-4-5fargsayed5No ratings yet
- Adams 2dof Car TutorialDocument19 pagesAdams 2dof Car TutorialShashank KatiyarNo ratings yet
- 07a1ec09 Engineering MechanicsDocument4 pages07a1ec09 Engineering Mechanicsأشرف عليNo ratings yet
- Dr. Kwon's: Golf Biomechanics Instructor TrainingDocument7 pagesDr. Kwon's: Golf Biomechanics Instructor TrainingBicho0% (1)
- 03 Gyroscopic CoupleDocument30 pages03 Gyroscopic CoupleSagar NeupaneNo ratings yet
- Beam TorsionDocument48 pagesBeam TorsionKory EstesNo ratings yet
- PBR Visvodaya Institute of Technology and Science: Kavali: Mechanical EngineeringDocument7 pagesPBR Visvodaya Institute of Technology and Science: Kavali: Mechanical Engineeringhod mechNo ratings yet
- Moment of Inertia 2Document51 pagesMoment of Inertia 2Kunal kumarNo ratings yet
- Aisc Member Dimensions and Properties ViewerDocument23 pagesAisc Member Dimensions and Properties ViewerMadara Uchija100% (1)
- Lecture Planner - Physics - Arjuna NEET 2025Document4 pagesLecture Planner - Physics - Arjuna NEET 2025Aaditya RathoreNo ratings yet
- Implementation of Pacejka's AnalyticalDocument42 pagesImplementation of Pacejka's AnalyticalRenan AlvesNo ratings yet
- Theory of Machine Kme 603Document3 pagesTheory of Machine Kme 603georgianrupesh3217No ratings yet
- Vernier Scale Reading Vernier Division Coinciding With Main Scale Division × Least Count (In CM) Total Reading Main Scale Reading + Vernier Scale Reading I.e., Diameter (In CM)Document30 pagesVernier Scale Reading Vernier Division Coinciding With Main Scale Division × Least Count (In CM) Total Reading Main Scale Reading + Vernier Scale Reading I.e., Diameter (In CM)Cdt varun rana 44No ratings yet
- Phyc 2121 Week 11 20Document89 pagesPhyc 2121 Week 11 20Marice Barrera100% (1)
- Biomekanika Cedera KepalaDocument14 pagesBiomekanika Cedera KepalaramadhankurniawanNo ratings yet
- rr10105 Applied MechanicsDocument13 pagesrr10105 Applied MechanicsSRINIVASA RAO GANTANo ratings yet
- Physics AssignmentDocument22 pagesPhysics AssignmentVeerareddy Vippala100% (1)
- اكمل و تمارين اعدادي هندسة ترم اولDocument9 pagesاكمل و تمارين اعدادي هندسة ترم اولAhmed aliNo ratings yet
- Physics ActivityDocument4 pagesPhysics ActivityLovryan Tadena AmilingNo ratings yet
- V 2 Chap 1Document34 pagesV 2 Chap 1guruvashisthaNo ratings yet
- PROBLEM 9.31: SolutionDocument10 pagesPROBLEM 9.31: Solutionjuan felipeNo ratings yet
- CFX Fsi 6dofDocument26 pagesCFX Fsi 6dofCFDiran.irNo ratings yet