You might also like
- Automated Current Control Method For Flux-Linkage Measurement of Synchronous Reluctance MachinesDocument11 pagesAutomated Current Control Method For Flux-Linkage Measurement of Synchronous Reluctance MachinesViệt Anh PhạmNo ratings yet
- B4e2 PDFDocument13 pagesB4e2 PDFعلي كامل الاسديNo ratings yet
- G J E S R: Lobal Ournal of Ngineering Cience and EsearchesDocument9 pagesG J E S R: Lobal Ournal of Ngineering Cience and EsearchesSAMPSON BENDORNo ratings yet
- Solid-Rotor Induction Motor Modeling Based On CircDocument16 pagesSolid-Rotor Induction Motor Modeling Based On CircIraqi stormNo ratings yet
- Modeling of The Dynamics of Rotors of An Energy Gas Turbine Installation Using An Analytical Method For Analyzing Active Magnetic Bearing CircuitsDocument6 pagesModeling of The Dynamics of Rotors of An Energy Gas Turbine Installation Using An Analytical Method For Analyzing Active Magnetic Bearing Circuitsshamiul himelNo ratings yet
- Nakayama 2019Document11 pagesNakayama 2019Harsh PatilNo ratings yet
- Measurement: Nenad Markovic, Slobodan Bjelic, Filip Markovic, Marko Markovic, Srdjan JovicDocument9 pagesMeasurement: Nenad Markovic, Slobodan Bjelic, Filip Markovic, Marko Markovic, Srdjan JovicHarshitha AspariNo ratings yet
- Novel Flux Linkage Estimation Algorithm For A Variable Flux PMSMDocument17 pagesNovel Flux Linkage Estimation Algorithm For A Variable Flux PMSMViệt Anh PhạmNo ratings yet
- Numerical Modeling of Claw Poles AlternaDocument4 pagesNumerical Modeling of Claw Poles AlternaDanielNo ratings yet
- Back-EMF Sensorless Control Algorithm For High Dynamics Performances PMSMDocument9 pagesBack-EMF Sensorless Control Algorithm For High Dynamics Performances PMSMSaranji GuruNo ratings yet
- A General Magnetic Energy BasedDocument8 pagesA General Magnetic Energy Basedforum algerieDZNo ratings yet
- Comprehensive Method For Transient Modeling of Single Phase InductionDocument15 pagesComprehensive Method For Transient Modeling of Single Phase InductionvalentinmullerNo ratings yet
- Simulation-Based Approach To Application Fitness For An E-BikeDocument6 pagesSimulation-Based Approach To Application Fitness For An E-BikeBatuhan SincanNo ratings yet
- CST EMS LowDocument4 pagesCST EMS LowAndrijana KuharNo ratings yet
- Effect of Generator Parameters Inaccuracy On Transient Stability PerformanceDocument5 pagesEffect of Generator Parameters Inaccuracy On Transient Stability PerformancesumathyNo ratings yet
- IJERTV1IS10035Document7 pagesIJERTV1IS10035payalNo ratings yet
- Model-Based Sensorless Control of An IPMSM With Enhanced Robustness Against Load Disturbances Based On Position and Speed Estimator Using A Speed ErrorDocument12 pagesModel-Based Sensorless Control of An IPMSM With Enhanced Robustness Against Load Disturbances Based On Position and Speed Estimator Using A Speed Errorsudheer307klceNo ratings yet
- A Novel Torque Quality Improvement of An Asymemetric Windings Permanent MagnetDocument6 pagesA Novel Torque Quality Improvement of An Asymemetric Windings Permanent MagnetLEONEL JORDY PEREZ SOLORZANONo ratings yet
- Long-Horizon Model Predictive Control of Induction Motor DriveDocument15 pagesLong-Horizon Model Predictive Control of Induction Motor DriveabbasNo ratings yet
- Analysis of Reactive Power Compensation Effect of A New Hybrid Excitation Brushless DC GeneratorDocument11 pagesAnalysis of Reactive Power Compensation Effect of A New Hybrid Excitation Brushless DC Generatorlinnan sunNo ratings yet
- Computer Applications in Engineering Education01Document15 pagesComputer Applications in Engineering Education01asadAghaNo ratings yet
- Analytical Calculation of Performance of Line-Start Permanent-Magnet Synchronous Motors Based On Multi-Damping-Circuit ModelDocument10 pagesAnalytical Calculation of Performance of Line-Start Permanent-Magnet Synchronous Motors Based On Multi-Damping-Circuit ModelPhil's ChannelNo ratings yet
- Methodology For Cage Shape Optimization of A Permanent Magnet Synchronous Motor Under Line Start ConditionsDocument4 pagesMethodology For Cage Shape Optimization of A Permanent Magnet Synchronous Motor Under Line Start ConditionsHamza farooqNo ratings yet
- Applsci 08 01073 PDFDocument13 pagesApplsci 08 01073 PDFErsi Ago100% (1)
- Improved Finite Control-Set Model-Based Direct Power Control of BLDC Motor With Reduced Torque RippleDocument9 pagesImproved Finite Control-Set Model-Based Direct Power Control of BLDC Motor With Reduced Torque RippleOscar Olarte OrtizNo ratings yet
- 5maximum Torque Per AmpereandMagnetization StateControlofaVariable FluxPermanentMagnetMachineDocument13 pages5maximum Torque Per AmpereandMagnetization StateControlofaVariable FluxPermanentMagnetMachineJacinto CanekNo ratings yet
- 1.nonlinear and Hybrid Modeling Approaches (Considering Also The Switching Behavior of The Power Electronic ActuatorsDocument27 pages1.nonlinear and Hybrid Modeling Approaches (Considering Also The Switching Behavior of The Power Electronic ActuatorsNeethu Elizabeth MichaelNo ratings yet
- The Adaptive Backstepping Control of Permanent Magnet Synchronous Motor Supplied by Current Source InverterDocument9 pagesThe Adaptive Backstepping Control of Permanent Magnet Synchronous Motor Supplied by Current Source InverterLê Đức ThịnhNo ratings yet
- Usman 2017Document6 pagesUsman 2017Faiza OuiddirNo ratings yet
- Performance Characteristics Brushless DC Drives: Abstruct-A Simulation Model For The Performance Prediction ofDocument6 pagesPerformance Characteristics Brushless DC Drives: Abstruct-A Simulation Model For The Performance Prediction ofhanxinNo ratings yet
- A1 - Full Papers PS2 10355 2022Document11 pagesA1 - Full Papers PS2 10355 2022DmitryNo ratings yet
- Topic Assignment4Document6 pagesTopic Assignment4Khoa NguyễnNo ratings yet
- 12pulse Lci Synchronous Drive For A 20 MW Compressor Modeling SiDocument7 pages12pulse Lci Synchronous Drive For A 20 MW Compressor Modeling Sijeevan sankarNo ratings yet
- Simulation of Six Phase Permanent Magnet Synchronous Generator in MATLABDocument5 pagesSimulation of Six Phase Permanent Magnet Synchronous Generator in MATLABجمال ضيفيNo ratings yet
- 3 - Joglekar2011Document10 pages3 - Joglekar2011Flávia Gonçalves FernandesNo ratings yet
- Crossmark: Control Engineering PracticeDocument13 pagesCrossmark: Control Engineering PracticeLê Đức ThịnhNo ratings yet
- Sensorless Three-Phase Induction Motor Direct TorqDocument7 pagesSensorless Three-Phase Induction Motor Direct TorqSakthivelNo ratings yet
- Virtual Synchronous Machines - Classification of Implementations and Analysis of Equivalence To Droop Controllers For MicrogridsDocument7 pagesVirtual Synchronous Machines - Classification of Implementations and Analysis of Equivalence To Droop Controllers For Microgridsiraj_214No ratings yet
- Ieee 9Document8 pagesIeee 9Rupesh SushirNo ratings yet
- Determination of Synchronous Machine Parameters THDocument4 pagesDetermination of Synchronous Machine Parameters THMoussa Koné KmNo ratings yet
- Modelling, Simulation of Permanent Magnet Synchronous Machine Drive Using FOC TechniqueDocument9 pagesModelling, Simulation of Permanent Magnet Synchronous Machine Drive Using FOC TechniqueahmedNo ratings yet
- Development of New Design To Improve The PerformanDocument12 pagesDevelopment of New Design To Improve The PerformanAhmet Yasin BaltacıNo ratings yet
- IEEE-TOM - Journal ArticleDocument4 pagesIEEE-TOM - Journal ArticleedumacerenNo ratings yet
- A New Model of Electromechanical Relays For Predicting The Motion and Electromagnetic DynamicsDocument9 pagesA New Model of Electromechanical Relays For Predicting The Motion and Electromagnetic DynamicsALFREDO MINDIOLANo ratings yet
- Assignment 03 RMDocument7 pagesAssignment 03 RMijazNo ratings yet
- Energy-Efficient Dynamic Drive Control For Wind Power Conversion With PMSG: Modeling and Application of Transfer Function AnalysisDocument12 pagesEnergy-Efficient Dynamic Drive Control For Wind Power Conversion With PMSG: Modeling and Application of Transfer Function Analysismalini72No ratings yet
- Computation of Additional Losses Due To Rotoreccentricity in Electrical MachinesDocument8 pagesComputation of Additional Losses Due To Rotoreccentricity in Electrical Machinesafru2000No ratings yet
- 6981 English TarjomeFaDocument9 pages6981 English TarjomeFaMehdi.akNo ratings yet
- Guest Editorial: Oscillations in Power Systems With High Penetration of Renewable Power GenerationsDocument3 pagesGuest Editorial: Oscillations in Power Systems With High Penetration of Renewable Power Generationsmachine learningNo ratings yet
- 2016 - Wavelet Packet Decomposition-Based Fault Diagnosis Scheme For SRM Drives With A Single Current SensorDocument11 pages2016 - Wavelet Packet Decomposition-Based Fault Diagnosis Scheme For SRM Drives With A Single Current Sensorsgw.sgwNo ratings yet
- Journal Jpe 14-5 293292634Document10 pagesJournal Jpe 14-5 293292634Roberto DiasNo ratings yet
- Sensor-Less Field Oriented Control of Wind TurbineDocument11 pagesSensor-Less Field Oriented Control of Wind TurbinegiovanniNo ratings yet
- Power Quality PaperDocument18 pagesPower Quality PaperSuresh SrinivasanNo ratings yet
- Etasr 4935Document9 pagesEtasr 4935Maulik ShahNo ratings yet
- 1994 - Ohnishi - Estimation, Identification, and SensorlessDocument13 pages1994 - Ohnishi - Estimation, Identification, and SensorlessJLuis LuNaNo ratings yet
- Energies 17 00147Document13 pagesEnergies 17 00147Global PapersNo ratings yet
- Energies 15 03564Document21 pagesEnergies 15 03564SuriyakumarNo ratings yet
- Modeling and Control of Power Electronic Converters for Microgrid ApplicationsFrom EverandModeling and Control of Power Electronic Converters for Microgrid ApplicationsNo ratings yet
- Chapter 1.2 - Basic Concepts of ThermodynamicsDocument21 pagesChapter 1.2 - Basic Concepts of ThermodynamicshudarusliNo ratings yet
- Chapter 2.1 - Energy, Energy Transfer - General Energy AnalysisDocument24 pagesChapter 2.1 - Energy, Energy Transfer - General Energy AnalysishudarusliNo ratings yet
- Chapter 7.5 - EntropyDocument11 pagesChapter 7.5 - EntropyhudarusliNo ratings yet
- ADAS 01-08 (Japan) Drivers Abnormal Condition Response System - Deceleration Stop Type Basic Design DocumentDocument27 pagesADAS 01-08 (Japan) Drivers Abnormal Condition Response System - Deceleration Stop Type Basic Design DocumenthudarusliNo ratings yet
- Analysis of Power Losses in 33/11KV Distribution Feeder Circuits Via Loss Factor TechniqueDocument10 pagesAnalysis of Power Losses in 33/11KV Distribution Feeder Circuits Via Loss Factor TechniquehudarusliNo ratings yet
- Handout Engineering MaterialsDocument225 pagesHandout Engineering MaterialshudarusliNo ratings yet
- Chapter 1.1 - Basic Concepts of ThermodynamicsDocument20 pagesChapter 1.1 - Basic Concepts of ThermodynamicshudarusliNo ratings yet
- S E P - C A (9 80 P) T P C: Ample XAM Roblem Ircuit Nalysis OF RoblemsDocument3 pagesS E P - C A (9 80 P) T P C: Ample XAM Roblem Ircuit Nalysis OF RoblemshudarusliNo ratings yet
- MPT 0192 - NotesDocument213 pagesMPT 0192 - NoteshudarusliNo ratings yet
- Interaksi Dan Pertukaran Intelek Saintis Agronomi Dan Doktor Perubatan Di Al-AndalusDocument23 pagesInteraksi Dan Pertukaran Intelek Saintis Agronomi Dan Doktor Perubatan Di Al-AndalushudarusliNo ratings yet
- Process Plan Project Name Material Part Name Drawing No Duration Operation Cutting Parameter Remark V M/min F Mm/revDocument1 pageProcess Plan Project Name Material Part Name Drawing No Duration Operation Cutting Parameter Remark V M/min F Mm/revhudarusliNo ratings yet
- Economics Thesis Blue VariantDocument37 pagesEconomics Thesis Blue VarianthudarusliNo ratings yet
- Introduction To CNC Milling - 1Document24 pagesIntroduction To CNC Milling - 1hudarusliNo ratings yet
- Chap 1-1Document53 pagesChap 1-1hudarusliNo ratings yet
- GMO 0313 CONV MillingDocument66 pagesGMO 0313 CONV MillinghudarusliNo ratings yet
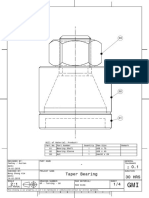
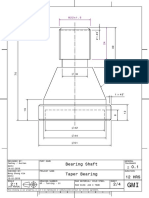
- Process Plan: Taper Bearing Mild Steel Nut 03 6hrs TurningDocument2 pagesProcess Plan: Taper Bearing Mild Steel Nut 03 6hrs TurninghudarusliNo ratings yet
- Workshop Practice - Turning - Taper Bearing Assembly - 20150118Document1 pageWorkshop Practice - Turning - Taper Bearing Assembly - 20150118hudarusliNo ratings yet
- Process Plan: V-Block Mild Steel V-Block 2 01 28hrs MillingDocument2 pagesProcess Plan: V-Block Mild Steel V-Block 2 01 28hrs MillinghudarusliNo ratings yet
- Chapter 3 (Taper)Document13 pagesChapter 3 (Taper)hudarusliNo ratings yet
- Workshop Practice - Turning - Part 1 - 20150118Document1 pageWorkshop Practice - Turning - Part 1 - 20150118hudarusliNo ratings yet
- CHAPTER 5 (Clamping Device)Document26 pagesCHAPTER 5 (Clamping Device)hudarusliNo ratings yet
- Grinding Technology GMO 0252Document88 pagesGrinding Technology GMO 0252hudarusliNo ratings yet
- Map 2163 Pre-Calculus Tutorial Chapter1Document34 pagesMap 2163 Pre-Calculus Tutorial Chapter1hudarusliNo ratings yet
- CHAPTER 6 (Steady-Align)Document16 pagesCHAPTER 6 (Steady-Align)hudarusliNo ratings yet
- CHAPTER 1 2 (Boring Knurling)Document18 pagesCHAPTER 1 2 (Boring Knurling)hudarusliNo ratings yet
- Obe Phy 2105 B C Fall 2021Document5 pagesObe Phy 2105 B C Fall 2021Mizanur Rahman Azhari fan's ClubNo ratings yet
- Moving Coil LoudspeakerDocument11 pagesMoving Coil LoudspeakerByron JimenezNo ratings yet
- P O E C: Utdoor Quipments OR Oupling DevicesDocument66 pagesP O E C: Utdoor Quipments OR Oupling DevicesmidhunvarNo ratings yet
- Transmission LinesDocument6 pagesTransmission Linesvon kervy onradeNo ratings yet
- Jumping Ring Experiment Effect of Temperature NonDocument8 pagesJumping Ring Experiment Effect of Temperature NonMinh Nguyễn Lục HoàngNo ratings yet
- Flyback ConvertorDocument6 pagesFlyback ConvertorEysha qureshiNo ratings yet
- Physics For Global Scientists and Engineers Volume 2 2Nd Edition Raymond A Serway All ChapterDocument67 pagesPhysics For Global Scientists and Engineers Volume 2 2Nd Edition Raymond A Serway All Chapterjoyce.bongiorno295100% (7)
- 214 Push-Pull Power Converter TopologiesDocument24 pages214 Push-Pull Power Converter TopologiesSudhanshu Shekhar0% (1)
- Module 1 MathsDocument34 pagesModule 1 Mathstonyl1972No ratings yet
- 01 Mutual InductanceDocument54 pages01 Mutual InductanceyahyeNo ratings yet
- Helmholzt LAKESHOREDocument11 pagesHelmholzt LAKESHOREBinh NguyenNo ratings yet
- Paul Baumann: Testatika Generator: Methernitha Group: CH-3517 Linden, SwitzerlandDocument24 pagesPaul Baumann: Testatika Generator: Methernitha Group: CH-3517 Linden, SwitzerlandLuca100% (1)
- ECE 447 Lecture 1 - Field Analysis of TL (2006)Document18 pagesECE 447 Lecture 1 - Field Analysis of TL (2006)david_hsu_14No ratings yet
- A & R Type Questions G-12 - PhysicsDocument13 pagesA & R Type Questions G-12 - PhysicsAbhiram VetchaNo ratings yet
- My CoursesDocument18 pagesMy Coursesmarlon corpuzNo ratings yet
- Ee 2nd PDFDocument67 pagesEe 2nd PDFbharath sNo ratings yet
- Cts Ictsm Cts Nsqf-5Document70 pagesCts Ictsm Cts Nsqf-5rajiv gandhi100% (1)
- Sizing of Power Cables For Circuit Breaker Controlled FeedersDocument15 pagesSizing of Power Cables For Circuit Breaker Controlled FeedersAlmir Mahmutovic100% (1)
- 16-Transformer and Transformer Feeder ProtDocument26 pages16-Transformer and Transformer Feeder ProtSristick100% (4)
- Transmission and Distribution QBDocument5 pagesTransmission and Distribution QBkrishnandrkNo ratings yet
- Ferrite Ferroxcube APPNOTE PDFDocument0 pagesFerrite Ferroxcube APPNOTE PDFwizardgrtNo ratings yet
- M30 Knig2461 04 Ism C30Document34 pagesM30 Knig2461 04 Ism C30Hanzala TahirNo ratings yet
- Power Topologies HandbookDocument199 pagesPower Topologies HandbookCarlos OrtegaNo ratings yet
- PRCI - ACMitigationDocument158 pagesPRCI - ACMitigationwasre100% (1)
- Magritek Terranova MRI Student Guide V1.2 2009 PDFDocument117 pagesMagritek Terranova MRI Student Guide V1.2 2009 PDFVarun Koneru100% (1)
- Revista ANSYSDocument52 pagesRevista ANSYSEgar MtzNo ratings yet
- CircuitsDocument22 pagesCircuitsapi-3732151100% (1)
- Principles of Electronic Communication System Chapter 2Document55 pagesPrinciples of Electronic Communication System Chapter 2Sir CashNo ratings yet
- IstudyDocument301 pagesIstudyDarwin Fabio Marin YepezNo ratings yet
- 1-MHz Self-Driven ZVS Full-Bridge Converter For 48-V Power Pod and DC-DC BrickDocument10 pages1-MHz Self-Driven ZVS Full-Bridge Converter For 48-V Power Pod and DC-DC Brick李漢祥No ratings yet