You might also like
- Tall Buildings: The Proceedings of a Symposium on Tall Buildings with Particular Reference to Shear Wall Structures, Held in the Department of Civil Engineering, University of Southampton, April 1966From EverandTall Buildings: The Proceedings of a Symposium on Tall Buildings with Particular Reference to Shear Wall Structures, Held in the Department of Civil Engineering, University of Southampton, April 1966A. CoullRating: 5 out of 5 stars5/5 (1)
- Remon Romp - Thesis (Final) HQDocument136 pagesRemon Romp - Thesis (Final) HQGijsPNo ratings yet
- Final Report Thesis PA RosinghDocument67 pagesFinal Report Thesis PA RosinghGoh Yong DaNo ratings yet
- Module 1b - Loads On Offshore StructruesDocument103 pagesModule 1b - Loads On Offshore Structruesyash.nth19No ratings yet
- Thesis JanJermanDocument106 pagesThesis JanJermanel000011No ratings yet
- When Copyright VestsDocument97 pagesWhen Copyright VestsJoann Saballero HamiliNo ratings yet
- 2021 ZhangDocument16 pages2021 ZhangBilqis SutomoNo ratings yet
- SEU Dynamic Analysis GN E-Feb17 PDFDocument40 pagesSEU Dynamic Analysis GN E-Feb17 PDFding liuNo ratings yet
- System: Meixiu ZhangDocument12 pagesSystem: Meixiu ZhangPopon SofieNo ratings yet
- Choice of Foreign Market Entry Mode: Cognitions From Empirical and Theoretical StudiesDocument27 pagesChoice of Foreign Market Entry Mode: Cognitions From Empirical and Theoretical Studiesayush shresthaNo ratings yet
- Order of AdjectivesDocument16 pagesOrder of AdjectiveswilyNo ratings yet
- Ferris (1996) The Case For Grammar Correction L2 Writing PDFDocument11 pagesFerris (1996) The Case For Grammar Correction L2 Writing PDFChompNo ratings yet
- US Wind Construction and Operations Plan Volume IDocument116 pagesUS Wind Construction and Operations Plan Volume IAhpek PekNo ratings yet
- Pestel & Five ForcesDocument42 pagesPestel & Five ForceswarbaasNo ratings yet
- Chapter22 Penetration TestingDocument58 pagesChapter22 Penetration TestingBlackcat FreeManNo ratings yet
- DNV-CG-0038 2021-08Document81 pagesDNV-CG-0038 2021-08wfxNo ratings yet
- Fem Analysis of Jack Up Spudcane PenetrationDocument10 pagesFem Analysis of Jack Up Spudcane PenetrationFaidzy RahmanNo ratings yet
- Offshore Wind Support Structures for Deep Water SitesDocument210 pagesOffshore Wind Support Structures for Deep Water SitesLai QuocNo ratings yet
- Design Sheet: 1. Material PropertiesDocument10 pagesDesign Sheet: 1. Material PropertiesJun MichaelNo ratings yet
- Nakata 2014Document21 pagesNakata 2014Noy PabicoNo ratings yet
- Soil Fatigue Due to Cyclically Loaded FoundationsDocument219 pagesSoil Fatigue Due to Cyclically Loaded FoundationsCuenta TelefonoNo ratings yet
- Ying Chen MSC ReportDocument106 pagesYing Chen MSC ReportRahul KolateNo ratings yet
- Dynamic Cone Penetration Test by ASTM (Filling Sand) : 0 1 2 3 4 5 6 7 0 ND (Blow/100mm)Document8 pagesDynamic Cone Penetration Test by ASTM (Filling Sand) : 0 1 2 3 4 5 6 7 0 ND (Blow/100mm)Archie Joseph LlanaNo ratings yet
- An Interpersonal Communication ProcessDocument46 pagesAn Interpersonal Communication Processosrah_g100% (1)
- Transportation AnalysisDocument42 pagesTransportation Analysisyash.nth19No ratings yet
- Lecture 81 - Monopile and Tripod - Jacket Foundations For Offshore Wind Foundations 10th April - Chris Golightly GO ELS LTDDocument44 pagesLecture 81 - Monopile and Tripod - Jacket Foundations For Offshore Wind Foundations 10th April - Chris Golightly GO ELS LTDPhu Le NgocNo ratings yet
- Studies On Cyclic Behavior of Tripod Suction BuckeDocument15 pagesStudies On Cyclic Behavior of Tripod Suction BuckeZaya TunNo ratings yet
- Teachers of English To Speakers of Other Languages, Inc. (TESOL) TESOL QuarterlyDocument27 pagesTeachers of English To Speakers of Other Languages, Inc. (TESOL) TESOL QuarterlyNarottamNo ratings yet
- Cone Penetration Test Soil DataDocument48 pagesCone Penetration Test Soil Datasmart mediaNo ratings yet
- Where:: No. Zi Yj (Z) T P (Z) P (Z) P (Z)Document1 pageWhere:: No. Zi Yj (Z) T P (Z) P (Z) P (Z)Thinh ViproNo ratings yet
- Boundaries Conditions of Suction Pile in AbaqusDocument13 pagesBoundaries Conditions of Suction Pile in AbaqusGaheza RukundoNo ratings yet
- Module 1 - Lecture 1 (Introduction)Document9 pagesModule 1 - Lecture 1 (Introduction)SuryaNo ratings yet
- Spudcan Bearing Capacity Calculation of The Offshore Jack-Up Drilling Platform Using The Preloading ProcessDocument6 pagesSpudcan Bearing Capacity Calculation of The Offshore Jack-Up Drilling Platform Using The Preloading ProcessNkechi KokoNo ratings yet
- Finite Element Analysis of The Pullout Capacity of Suction Caissons in ClayDocument97 pagesFinite Element Analysis of The Pullout Capacity of Suction Caissons in ClayDang Quang MinhNo ratings yet
- Simulation and Numerical Analysis of Offshore WindDocument12 pagesSimulation and Numerical Analysis of Offshore WindCarlos JavierNo ratings yet
- Non-Linear Buckling of Conical Shells Under External Hydrostatic PressureDocument16 pagesNon-Linear Buckling of Conical Shells Under External Hydrostatic PressureMohd Shahrom IsmailNo ratings yet
- Tripod Support Structure: Pre-Design and Natural Frequency Assessment For The 6 MW DOWECDocument21 pagesTripod Support Structure: Pre-Design and Natural Frequency Assessment For The 6 MW DOWECGuillermoNo ratings yet
- Dynamic Load Prediction in Offshore Wind TurbinesDocument70 pagesDynamic Load Prediction in Offshore Wind TurbinesNader GhareebNo ratings yet
- Lab Pipe FrictionDocument8 pagesLab Pipe Friction功夫熊貓No ratings yet
- Module 1 - Lecture 2 (Introduction)Document12 pagesModule 1 - Lecture 2 (Introduction)SuryaNo ratings yet
- A Failure Surface For Caisson Foundations in Undrained Soils.Document7 pagesA Failure Surface For Caisson Foundations in Undrained Soils.franciscoerezNo ratings yet
- Jack-Up Rig Foundation DesignDocument13 pagesJack-Up Rig Foundation DesignPutri KurniawatiNo ratings yet
- Evaluating Vertical and Horizontal Capacities of Bucket Foundations in ClayDocument8 pagesEvaluating Vertical and Horizontal Capacities of Bucket Foundations in Clayvananhlt18No ratings yet
- Numerical Analysis of The Capacity of Suction Caisson Anchors Considering Soil-Caisson Interface CharacteristicsDocument106 pagesNumerical Analysis of The Capacity of Suction Caisson Anchors Considering Soil-Caisson Interface CharacteristicsDang Quang Minh0% (1)
- 3D FE Analysis Offshore Jack-Up StructuresDocument73 pages3D FE Analysis Offshore Jack-Up StructuresJosé Antonio Alarcón LeónNo ratings yet
- T. Lukkezen - Thesis FinalDocument86 pagesT. Lukkezen - Thesis FinalDebdeep SarkarNo ratings yet
- Calculation and Analysis of Sea-Fastening Support and Welding Strength of Topside ModuleDocument8 pagesCalculation and Analysis of Sea-Fastening Support and Welding Strength of Topside Modulepartha.fernandoNo ratings yet
- NGI Offshore Wind Foundations Strategic Research Project SP2 2011-2013Document10 pagesNGI Offshore Wind Foundations Strategic Research Project SP2 2011-2013ec992100% (1)
- Failure Loci of Suction Caisson Foundations Under Combined Loading ConditionsDocument11 pagesFailure Loci of Suction Caisson Foundations Under Combined Loading ConditionsDang Quang MinhNo ratings yet
- Gaurav Kumar& Saujanya Kumar Sahu ThesisDocument73 pagesGaurav Kumar& Saujanya Kumar Sahu ThesisVikas SarafNo ratings yet
- OTC 17236 The New API RP 2A, 22nd Edition Tubular Joint Design PracticeDocument10 pagesOTC 17236 The New API RP 2A, 22nd Edition Tubular Joint Design PracticeGrant HosieNo ratings yet
- 2014 Statistical Analysis of Wind Speed Data Using Weibull Distribution ParametersDocument5 pages2014 Statistical Analysis of Wind Speed Data Using Weibull Distribution ParametersDiego AvendañoNo ratings yet
- Trabajo Tablestacas (Cricaldi)Document5 pagesTrabajo Tablestacas (Cricaldi)Orlando Carlos Ricaldi VictorioNo ratings yet
- Modelling of Radial Joints of Tunnel in Plaxis PDFDocument148 pagesModelling of Radial Joints of Tunnel in Plaxis PDFMaheswara VarmaNo ratings yet
- Presentation On Offshore Geotechnical en PDFDocument13 pagesPresentation On Offshore Geotechnical en PDFDadang Kurnia100% (1)
- Advanced Site Specific Analysis of Skirted Spudcans in The View of North Sea ExperiencesDocument23 pagesAdvanced Site Specific Analysis of Skirted Spudcans in The View of North Sea ExperiencesgulinNo ratings yet
- Bridge Engineering HandBook, Troitsky, M.SDocument287 pagesBridge Engineering HandBook, Troitsky, M.Smanju bhargavNo ratings yet
- Performance of Suction Caissons in Sand and ClayDocument10 pagesPerformance of Suction Caissons in Sand and ClayDang Quang MinhNo ratings yet
- Inclined Pull-Out Capacity of Suction Caisson Embedded in SandDocument10 pagesInclined Pull-Out Capacity of Suction Caisson Embedded in SandDang Quang MinhNo ratings yet
- Seismic Response of Bucket Foundation and Structure Under Earthquake LoadingDocument14 pagesSeismic Response of Bucket Foundation and Structure Under Earthquake Loadingabidah fitraNo ratings yet
- IHHA - Guidelines To Best Practices For Heavy Haul Railways Operations Wheel Rail Interface Issues PDFDocument484 pagesIHHA - Guidelines To Best Practices For Heavy Haul Railways Operations Wheel Rail Interface Issues PDFmarcusNo ratings yet
- Lessons To Be Learnt From Bridge Failures: October 2021Document19 pagesLessons To Be Learnt From Bridge Failures: October 2021Rakesh KapoorNo ratings yet
- CHP 5 CONSTDocument56 pagesCHP 5 CONSTGreg VarneyNo ratings yet
- Automation - of - Structural - Health - Monitoring - SHM - System Using BIMification Approach-2023Document19 pagesAutomation - of - Structural - Health - Monitoring - SHM - System Using BIMification Approach-2023Rakesh KapoorNo ratings yet
- DOT-FHWA Wildlife Crossing Structures HandbookDocument223 pagesDOT-FHWA Wildlife Crossing Structures HandbookAlan VargasNo ratings yet
- Piles in Marine Clay-Lateral BHVR - IJMT-v2n0p15-enDocument14 pagesPiles in Marine Clay-Lateral BHVR - IJMT-v2n0p15-enRakesh KapoorNo ratings yet
- Rapid Repair Embankment Slope Failure - Fhwa report-2019-Texas-ArlingtonDocument227 pagesRapid Repair Embankment Slope Failure - Fhwa report-2019-Texas-ArlingtonRakesh KapoorNo ratings yet
- Stability Analysis of Geocell Reinforced Slopes by Considering Bending EffectDocument13 pagesStability Analysis of Geocell Reinforced Slopes by Considering Bending EffectRakesh KapoorNo ratings yet
- Design of Tall Formworks by FEM - Paper - 136 - 7 - 803 PDFDocument9 pagesDesign of Tall Formworks by FEM - Paper - 136 - 7 - 803 PDFRakesh KapoorNo ratings yet
- I-35 Minneapolis BRDG Collapse Report TR - 166 PDFDocument60 pagesI-35 Minneapolis BRDG Collapse Report TR - 166 PDFRakesh KapoorNo ratings yet
- Calcul Evaltn-Embankments Reinforced With geocells-FEM-2015Document14 pagesCalcul Evaltn-Embankments Reinforced With geocells-FEM-2015Rakesh KapoorNo ratings yet
- $RTPP7RL PDFDocument19 pages$RTPP7RL PDFvkkr4567No ratings yet
- Study Well Fdns Under Diff Grip Length and 5fcc PDFDocument2 pagesStudy Well Fdns Under Diff Grip Length and 5fcc PDFRakesh KapoorNo ratings yet
- Stability Analysis of Geocell Reinforced Slopes by Considering Bending EffectDocument13 pagesStability Analysis of Geocell Reinforced Slopes by Considering Bending EffectRakesh KapoorNo ratings yet
- Aerodynamics of Trains in Tunnels - Faramehr-PhDDocument77 pagesAerodynamics of Trains in Tunnels - Faramehr-PhDRakesh KapoorNo ratings yet
- A Winkler-Based Method For The Assessment of TunneDocument9 pagesA Winkler-Based Method For The Assessment of TunneRakesh KapoorNo ratings yet
- Tie Back Anchors For Soldier Pile N Lagging Wall - Iowa-DOT - SP-150358aDocument19 pagesTie Back Anchors For Soldier Pile N Lagging Wall - Iowa-DOT - SP-150358aRakesh KapoorNo ratings yet
- 01 Tug NatmDocument38 pages01 Tug NatmFajar SariandiNo ratings yet
- Reinforced ring foundations spread silo load over soilDocument6 pagesReinforced ring foundations spread silo load over soiljeovanNo ratings yet
- Freight Yard Design PDFDocument14 pagesFreight Yard Design PDFRakesh Kapoor100% (2)
- Cable Stays Vibrtn Mitigation 2011 - Bridge - Bennett - 1 PDFDocument20 pagesCable Stays Vibrtn Mitigation 2011 - Bridge - Bennett - 1 PDFRakesh KapoorNo ratings yet
- FOB-Vibration Analysis PDFDocument89 pagesFOB-Vibration Analysis PDFovikbasuNo ratings yet
- Guidelines For The Design of High Mast Pole FoundationDocument33 pagesGuidelines For The Design of High Mast Pole FoundationRakesh KapoorNo ratings yet
- 2011 Life Cycle AnalysisDocument8 pages2011 Life Cycle AnalysisRakesh KapoorNo ratings yet
- Sustainable Design N Constn - 2nd Penang Bridge-PUODocument75 pagesSustainable Design N Constn - 2nd Penang Bridge-PUORakesh Kapoor100% (3)
- NATM PPT Gall-Natm-Design-Construction PDFDocument63 pagesNATM PPT Gall-Natm-Design-Construction PDFRakesh KapoorNo ratings yet
- Exposure ClassesDocument17 pagesExposure ClassesDivine DozaNo ratings yet
- Maintaining Grouted AnchorsDocument7 pagesMaintaining Grouted AnchorsRakesh KapoorNo ratings yet
- Advances in High Performance Steels For Highway Bridges PDFDocument9 pagesAdvances in High Performance Steels For Highway Bridges PDFKumar AtrayNo ratings yet
- Manual WP311LDocument122 pagesManual WP311LILLUMINATORNo ratings yet
- Settlement of piles founded in rock calculation as per IS 8009 (Part IIDocument2 pagesSettlement of piles founded in rock calculation as per IS 8009 (Part IIpravinNo ratings yet
- MEL716 Micro Scale Heat Transfer Course Profile 2011 12Document2 pagesMEL716 Micro Scale Heat Transfer Course Profile 2011 12gaurav110790No ratings yet
- Bicycle and Motorcycle DynamicsDocument30 pagesBicycle and Motorcycle DynamicsTawseef RahmanNo ratings yet
- Listagem de Pecas DynapacDocument2,838 pagesListagem de Pecas DynapacMARCO CHELINo ratings yet
- DIN EN 809:2012-10 (E) : Pumps and Pump Units For Liquids - Common Safety RequirementsDocument2 pagesDIN EN 809:2012-10 (E) : Pumps and Pump Units For Liquids - Common Safety RequirementsBvitalizeNo ratings yet
- Razvodni VentilDocument17 pagesRazvodni VentilalexkeserNo ratings yet
- NCDOT WPS for Double V Groove Welds with Back GougeDocument3 pagesNCDOT WPS for Double V Groove Welds with Back GougeBhavani PrasadNo ratings yet
- Toyotomi Akira 2013 Εγχειρίδιο ΧρήσηςDocument88 pagesToyotomi Akira 2013 Εγχειρίδιο ΧρήσηςΚώστας Πολύφημος100% (1)
- EFRC Scope of Standards and Guidelines For Reciprocating Compressor Systems 20190408Document90 pagesEFRC Scope of Standards and Guidelines For Reciprocating Compressor Systems 20190408subrataNo ratings yet
- Presentation1 Single Plate ClutchDocument20 pagesPresentation1 Single Plate ClutchlokeshNo ratings yet
- HH 1200 - BrochureDocument2 pagesHH 1200 - BrochureCentrifugal SeparatorNo ratings yet
- Tib 19 Submersible Motor Pumps Vs Lineshaft TurbinesDocument5 pagesTib 19 Submersible Motor Pumps Vs Lineshaft Turbinesmeeraksam42No ratings yet
- Kenwood & Homage Electronics Cash Rates 2021Document1 pageKenwood & Homage Electronics Cash Rates 2021RD DaskaNo ratings yet
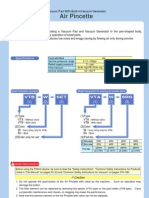
- PISCO Air PincetteDocument2 pagesPISCO Air PincetteErry_DukuhNo ratings yet
- Exchanger - DryplusShellTube (And Air Cooled Condensers) - Up To 60k - Alfalaval - Update2016Document69 pagesExchanger - DryplusShellTube (And Air Cooled Condensers) - Up To 60k - Alfalaval - Update2016parsmessengerNo ratings yet
- CV Shoaib Anwar - TPI Aramco VID and API 653 Inspector - TDocument5 pagesCV Shoaib Anwar - TPI Aramco VID and API 653 Inspector - Tshoaib2scribedNo ratings yet
- Plot Poles Contour Structural DataDocument14 pagesPlot Poles Contour Structural DataSky FireNo ratings yet
- MPD LIBRA PROJECT ADVANCE TRAINING: FINGERPRINTING FOR MPD OPERATIONSDocument187 pagesMPD LIBRA PROJECT ADVANCE TRAINING: FINGERPRINTING FOR MPD OPERATIONSGabrielNo ratings yet
- Deublin Engineering Catalog English NAmerDocument56 pagesDeublin Engineering Catalog English NAmerOilGasManNo ratings yet
- BME Fifth Semester Theory ModulesDocument5 pagesBME Fifth Semester Theory ModulesDeepak AgrawalNo ratings yet
- International HS 2.8L Workshop Manual ARODocument130 pagesInternational HS 2.8L Workshop Manual AROginghinacNo ratings yet
- Technoslide Elastomeric-Plain-Sliding-Bearings-For-Bridges-Structures-BrochureDocument13 pagesTechnoslide Elastomeric-Plain-Sliding-Bearings-For-Bridges-Structures-BrochureRm1262No ratings yet
- Ae963 Load Cell TecsisDocument16 pagesAe963 Load Cell TecsisTaQuangDucNo ratings yet
- Zenit Grey Series Submersible Pumps CatalogueDocument12 pagesZenit Grey Series Submersible Pumps CatalogueDeiv JaviNo ratings yet
- Sample & Practice Tutorial Assignment On UNIT IIDocument9 pagesSample & Practice Tutorial Assignment On UNIT IIFF02 Aniket BarhateNo ratings yet
- Cutter Wheel - H1140Document4 pagesCutter Wheel - H1140Sebastián Fernando Canul Mendez100% (2)
- Measure Engine Performance and Calculate Key ParametersDocument28 pagesMeasure Engine Performance and Calculate Key ParametersbroNo ratings yet
- VD 07Document4 pagesVD 07Constantin294No ratings yet
- Dark Matter and the Dinosaurs: The Astounding Interconnectedness of the UniverseFrom EverandDark Matter and the Dinosaurs: The Astounding Interconnectedness of the UniverseRating: 3.5 out of 5 stars3.5/5 (69)
- Roxane Gay & Everand Originals: My Year of Psychedelics: Lessons on Better LivingFrom EverandRoxane Gay & Everand Originals: My Year of Psychedelics: Lessons on Better LivingRating: 5 out of 5 stars5/5 (5)
- Roxane Gay & Everand Originals: My Year of Psychedelics: Lessons on Better LivingFrom EverandRoxane Gay & Everand Originals: My Year of Psychedelics: Lessons on Better LivingRating: 3.5 out of 5 stars3.5/5 (33)
- Alex & Me: How a Scientist and a Parrot Discovered a Hidden World of Animal Intelligence—and Formed a Deep Bond in the ProcessFrom EverandAlex & Me: How a Scientist and a Parrot Discovered a Hidden World of Animal Intelligence—and Formed a Deep Bond in the ProcessNo ratings yet
- World of Wonders: In Praise of Fireflies, Whale Sharks, and Other AstonishmentsFrom EverandWorld of Wonders: In Praise of Fireflies, Whale Sharks, and Other AstonishmentsRating: 4 out of 5 stars4/5 (222)
- The Other End of the Leash: Why We Do What We Do Around DogsFrom EverandThe Other End of the Leash: Why We Do What We Do Around DogsRating: 5 out of 5 stars5/5 (63)
- The Ancestor's Tale: A Pilgrimage to the Dawn of EvolutionFrom EverandThe Ancestor's Tale: A Pilgrimage to the Dawn of EvolutionRating: 4 out of 5 stars4/5 (811)
- The Revolutionary Genius of Plants: A New Understanding of Plant Intelligence and BehaviorFrom EverandThe Revolutionary Genius of Plants: A New Understanding of Plant Intelligence and BehaviorRating: 4.5 out of 5 stars4.5/5 (137)
- Come Back, Como: Winning the Heart of a Reluctant DogFrom EverandCome Back, Como: Winning the Heart of a Reluctant DogRating: 3.5 out of 5 stars3.5/5 (10)
- Why Fish Don't Exist: A Story of Loss, Love, and the Hidden Order of LifeFrom EverandWhy Fish Don't Exist: A Story of Loss, Love, and the Hidden Order of LifeRating: 4.5 out of 5 stars4.5/5 (699)
- Wayfinding: The Science and Mystery of How Humans Navigate the WorldFrom EverandWayfinding: The Science and Mystery of How Humans Navigate the WorldRating: 4.5 out of 5 stars4.5/5 (18)
- When You Find Out the World Is Against You: And Other Funny Memories About Awful MomentsFrom EverandWhen You Find Out the World Is Against You: And Other Funny Memories About Awful MomentsRating: 3.5 out of 5 stars3.5/5 (13)
- Fire Season: Field Notes from a Wilderness LookoutFrom EverandFire Season: Field Notes from a Wilderness LookoutRating: 4 out of 5 stars4/5 (142)
- The Big, Bad Book of Botany: The World's Most Fascinating FloraFrom EverandThe Big, Bad Book of Botany: The World's Most Fascinating FloraRating: 3 out of 5 stars3/5 (10)
- The Secret Life of Lobsters: How Fishermen and Scientists Are Unraveling the Mysteries of Our Favorite CrustaceanFrom EverandThe Secret Life of Lobsters: How Fishermen and Scientists Are Unraveling the Mysteries of Our Favorite CrustaceanNo ratings yet
- Gathering Moss: A Natural and Cultural History of MossesFrom EverandGathering Moss: A Natural and Cultural History of MossesRating: 4.5 out of 5 stars4.5/5 (348)
- The Mind of Plants: Narratives of Vegetal IntelligenceFrom EverandThe Mind of Plants: Narratives of Vegetal IntelligenceRating: 4.5 out of 5 stars4.5/5 (11)
- Last Child in the Woods: Saving Our Children From Nature-Deficit DisorderFrom EverandLast Child in the Woods: Saving Our Children From Nature-Deficit DisorderRating: 4 out of 5 stars4/5 (283)
- Spoiled Rotten America: Outrages of Everyday LifeFrom EverandSpoiled Rotten America: Outrages of Everyday LifeRating: 3 out of 5 stars3/5 (19)
- The Rise and Fall of the Dinosaurs: A New History of a Lost WorldFrom EverandThe Rise and Fall of the Dinosaurs: A New History of a Lost WorldRating: 4 out of 5 stars4/5 (593)