You might also like
- 1 s2.0 S0029801823011770 MainDocument17 pages1 s2.0 S0029801823011770 Main4si21cv008No ratings yet
- Strength Testing Archaeological CeramicsDocument16 pagesStrength Testing Archaeological CeramicsMarcoNo ratings yet
- Corteii, YacimientosDocument10 pagesCorteii, YacimientosOswa LrNo ratings yet
- Embry 2009 Sequence-StratigraphyDocument81 pagesEmbry 2009 Sequence-StratigraphyDamaso Miguel Garcia CarvajalNo ratings yet
- Determinacion de Modulos de Elasticidad Usando Strain GaugeDocument7 pagesDeterminacion de Modulos de Elasticidad Usando Strain GaugeMiuler Aguilar GrandezNo ratings yet
- Effect of Formations Anisotropy On Directional Tendencies of Drilling SystemsDocument10 pagesEffect of Formations Anisotropy On Directional Tendencies of Drilling SystemsMejbahul SarkerNo ratings yet
- Journal of Natural Gas Science and Engineering: Shuai Heng, Xianzhong Li, Xiao Liu, Yan ChenDocument22 pagesJournal of Natural Gas Science and Engineering: Shuai Heng, Xianzhong Li, Xiao Liu, Yan ChennizzamiNo ratings yet
- Fault and Joint Development in Brittle and Semi-Brittle Rock: The Commonwealth and International Library: Geology DivisionFrom EverandFault and Joint Development in Brittle and Semi-Brittle Rock: The Commonwealth and International Library: Geology DivisionNo ratings yet
- Ben Ammar 2014Document12 pagesBen Ammar 2014Anand NagarajanNo ratings yet
- Foundations On Sandstone and Shale in The Sydney RegionDocument13 pagesFoundations On Sandstone and Shale in The Sydney RegionShahin FalahatiNo ratings yet
- SsymmetricDocument17 pagesSsymmetricFalak Sher BuzdarNo ratings yet
- Vibration of cylindrical shells with FGM layerDocument12 pagesVibration of cylindrical shells with FGM layerSaba GheniNo ratings yet
- Geometric Characteristics of Pull-Apart Basins: ResearchDocument8 pagesGeometric Characteristics of Pull-Apart Basins: ResearchAntonioNo ratings yet
- Peron Pinvidic Etal MPG 2013Document27 pagesPeron Pinvidic Etal MPG 2013firaNo ratings yet
- Modelo Reológico de Fractura en Un SolidoDocument12 pagesModelo Reológico de Fractura en Un SolidoJose Antonio Sonco MarronNo ratings yet
- Vibrations of Thick Rotating Laminated Composite Cylindrical ShellsDocument1 pageVibrations of Thick Rotating Laminated Composite Cylindrical ShellselishirinNo ratings yet
- Msiptc PDFDocument28 pagesMsiptc PDFAiwarikiaarNo ratings yet
- Wave behaviors of sandy and silty seabedsDocument8 pagesWave behaviors of sandy and silty seabedsLei QiNo ratings yet
- Rift Sequence StratigraphyDocument8 pagesRift Sequence StratigraphyprijayamNo ratings yet
- Piled Raft Models Load TestsDocument19 pagesPiled Raft Models Load TestsVetriselvan ArumugamNo ratings yet
- Free Vib 1Document20 pagesFree Vib 1Sowjanya KametyNo ratings yet
- Experimental Modeling of Pile-Leg Interaction in Jacket Type Offshore Platforms Cyclic Inelastic BehaviorDocument13 pagesExperimental Modeling of Pile-Leg Interaction in Jacket Type Offshore Platforms Cyclic Inelastic BehaviorsreelakshmikrishnaNo ratings yet
- Wear CrusherDocument12 pagesWear CrusherMateus ZanettiNo ratings yet
- Conjugate-Shear Folding (A Model For The Relationships Between Foliations, Folds and Shear Zones)Document16 pagesConjugate-Shear Folding (A Model For The Relationships Between Foliations, Folds and Shear Zones)la ode ikraNo ratings yet
- JAES Trishear PrintDocument12 pagesJAES Trishear PrintDadanNo ratings yet
- Journal of Structural Geology: Peter J. Hudleston, Susan H. TreagusDocument30 pagesJournal of Structural Geology: Peter J. Hudleston, Susan H. TreagusRizky Dwi RenaldyNo ratings yet
- SPE 130745 How To Propagate Petrophysical Properties in A Fracture Network For Naturally Fractured Carbonate Reservoirs Case Study: Cretaceous Formations at Maracaibo Lake, VenezuelaDocument14 pagesSPE 130745 How To Propagate Petrophysical Properties in A Fracture Network For Naturally Fractured Carbonate Reservoirs Case Study: Cretaceous Formations at Maracaibo Lake, VenezuelaRizky Dermawan HaqNo ratings yet
- Experimental Antiformal StacksDocument35 pagesExperimental Antiformal StacksEdwinNo ratings yet
- Stress Analysis of Structural Components of Biomimetic Autonomous Subsea VehiclesDocument6 pagesStress Analysis of Structural Components of Biomimetic Autonomous Subsea VehiclesTJPRC PublicationsNo ratings yet
- State of The Art of DSRW Test Equipment Subjected To Side Loads and Equipment Proposal For Static Testing at Natural ScaleDocument9 pagesState of The Art of DSRW Test Equipment Subjected To Side Loads and Equipment Proposal For Static Testing at Natural ScaleBartolomeo GuzmanNo ratings yet
- Creep Along Weak Planes Affects Roof StabilityDocument8 pagesCreep Along Weak Planes Affects Roof StabilityDiego Andres Rubio ContrerasNo ratings yet
- High Resolution Sequence Stratigraphy ofDocument15 pagesHigh Resolution Sequence Stratigraphy ofOscar Javier Vera ZambranoNo ratings yet
- A Collocation Method For Bending Torsional and Axial Vibrations of Offshore Wind Turbines On Monopile FoundationDocument17 pagesA Collocation Method For Bending Torsional and Axial Vibrations of Offshore Wind Turbines On Monopile FoundationSunil Ranjan MohapatraNo ratings yet
- Asemgodoysosa 1Document9 pagesAsemgodoysosa 1Thiago Lins CostaNo ratings yet
- 1 s2.0 S0141118709000212 MainDocument13 pages1 s2.0 S0141118709000212 MainKusuma Indra SuryaNo ratings yet
- Distinct Styles of Uvial Deposition in A Cambrian Rift BasinDocument36 pagesDistinct Styles of Uvial Deposition in A Cambrian Rift BasinAxel Giovoglanian FerreroNo ratings yet
- In-Situ Soil TesterDocument8 pagesIn-Situ Soil TesterRajeuv GovindanNo ratings yet
- 1 s2.0 S0029801820310829 MainDocument11 pages1 s2.0 S0029801820310829 MainAmal PrasadNo ratings yet
- SPE 63286 Reservoir Characterization For Naturally Fractured ReservoirsDocument11 pagesSPE 63286 Reservoir Characterization For Naturally Fractured ReservoirsSaùl RsNo ratings yet
- Nested geological modelling improves fractured reservoir simulationsDocument10 pagesNested geological modelling improves fractured reservoir simulationsJuan Francisco VillacresesNo ratings yet
- Effect of Pretension On Moored Ship RespDocument13 pagesEffect of Pretension On Moored Ship RespIvandito HerdayandityaNo ratings yet
- Experimental Investigation of A Model Jack-Up Unit On ClayDocument9 pagesExperimental Investigation of A Model Jack-Up Unit On ClayArpit ParikhNo ratings yet
- A Practical Approach in Modeling NFRDocument10 pagesA Practical Approach in Modeling NFRmhuf89No ratings yet
- An Investigation Into Fracture Toughness and Mechanisms in Anisotropic Rocks Using The Acoustic Emission MethodDocument7 pagesAn Investigation Into Fracture Toughness and Mechanisms in Anisotropic Rocks Using The Acoustic Emission MethodMilja PavlovicNo ratings yet
- Numerical Analysts of Large S@E Horizontal Strip: AnchorsDocument213 pagesNumerical Analysts of Large S@E Horizontal Strip: Anchorsapi-26568392No ratings yet
- Inelastic Nonlinear Pushover Analysis of Fixed Jacket-Type Offshore Platform With Different Bracing Systems Considering Soil-Structure InteractionDocument15 pagesInelastic Nonlinear Pushover Analysis of Fixed Jacket-Type Offshore Platform With Different Bracing Systems Considering Soil-Structure InteractionHiden Jaime Machaca HuancolloNo ratings yet
- 1111 MergedDocument12 pages1111 MergedMA. ANGELINE GRANADANo ratings yet
- Research Paper 13 - Elseier - Sir YasirDocument10 pagesResearch Paper 13 - Elseier - Sir YasirAbdullah aminNo ratings yet
- International Society For Soil Mechanics and Geotechnical EngineeringDocument11 pagesInternational Society For Soil Mechanics and Geotechnical EngineeringThaung Myint OoNo ratings yet
- Mechanical Properties of Transversely Isotropic SlateDocument11 pagesMechanical Properties of Transversely Isotropic SlatePablo Andres SandovalNo ratings yet
- A. Stokes 1996Document7 pagesA. Stokes 1996Joe ChuNo ratings yet
- Perras Diederichs 2011 CGS ClassificationDocument9 pagesPerras Diederichs 2011 CGS ClassificationAmir KhanNo ratings yet
- Analysis of The Influence of Stiffness Reduction On The Load Carrying CapacityDocument11 pagesAnalysis of The Influence of Stiffness Reduction On The Load Carrying CapacitySUBHASHNo ratings yet
- 1-S2.0-S1674775514000390-Main Geology RecordDocument13 pages1-S2.0-S1674775514000390-Main Geology RecordSanjeev Kr. ThakurNo ratings yet
- Estimating reservoir properties of Haynesville Shale using rock physics modellingDocument15 pagesEstimating reservoir properties of Haynesville Shale using rock physics modellingmohamedNo ratings yet
- Control of Tectonic Setting and Large-Scale Faults On The Basin-Scale Distribution of Deformation Bands in Porous Sandstone (Provence, France)Document18 pagesControl of Tectonic Setting and Large-Scale Faults On The Basin-Scale Distribution of Deformation Bands in Porous Sandstone (Provence, France)AiwarikiaarNo ratings yet
- Journal of Rock Mechanics and Geotechnical Engineering: Daisuke Katsuki, Marte Gutierrez, Abdulhadi AlmrabatDocument11 pagesJournal of Rock Mechanics and Geotechnical Engineering: Daisuke Katsuki, Marte Gutierrez, Abdulhadi AlmrabatGiomer JR CondoriNo ratings yet
- 88CV303Document6 pages88CV303badbastardNo ratings yet
- 1998 Mitra Foreland Basement-Involved StructuresDocument40 pages1998 Mitra Foreland Basement-Involved StructuresLucas ContalbaNo ratings yet
- Analysis of Laterally Loaded Group of Piles Located On Sloping GroundDocument11 pagesAnalysis of Laterally Loaded Group of Piles Located On Sloping GroundLuna DaaboulNo ratings yet
- KramerYoung-snhPaper Revised RevFinalDocument15 pagesKramerYoung-snhPaper Revised RevFinalJUNIOR OLIVONo ratings yet
- F 681 - 82 R98 Standard Practice For Use of Branch ConnectionsDocument5 pagesF 681 - 82 R98 Standard Practice For Use of Branch Connectionsi_tiberius_m8153No ratings yet
- F 670 - 87 R94 - Rjy3mc1sruq - PDFDocument5 pagesF 670 - 87 R94 - Rjy3mc1sruq - PDFRománBarciaVazquezNo ratings yet
- KramerYoung-snhPaper Revised RevFinalDocument15 pagesKramerYoung-snhPaper Revised RevFinalJUNIOR OLIVONo ratings yet
- F 670 - 87 R94 - Rjy3mc04n1i5neux PDFDocument3 pagesF 670 - 87 R94 - Rjy3mc04n1i5neux PDFJoão Mendonça SantosNo ratings yet
- HSC Part 5 - July 2019Document36 pagesHSC Part 5 - July 2019JUNIOR OLIVONo ratings yet
- Text Illustrations Statics and Mechanics of Materials: An Integrated Approach, 2nd EditionDocument8 pagesText Illustrations Statics and Mechanics of Materials: An Integrated Approach, 2nd EditionJUNIOR OLIVONo ratings yet
- EN400 Lab #1 Prelab Numerical Integration: InstructionsDocument10 pagesEN400 Lab #1 Prelab Numerical Integration: InstructionsJUNIOR OLIVONo ratings yet
- F 670 - 02 - Rjy3ma - PDFDocument3 pagesF 670 - 02 - Rjy3ma - PDFRománBarciaVazquezNo ratings yet
- Propeller Design Calculations and AnalysisDocument5 pagesPropeller Design Calculations and AnalysischaktimewpNo ratings yet
- 05.01a Lab 1 Numerical IntegrationDocument2 pages05.01a Lab 1 Numerical IntegrationJUNIOR OLIVONo ratings yet
- 02.02a Ch2 HW SolutionsDocument16 pages02.02a Ch2 HW SolutionsJUNIOR OLIVONo ratings yet
- Pr1D Procedure For Class Entry of Ships Not Subject To PR1A or PR1B Pr1DDocument6 pagesPr1D Procedure For Class Entry of Ships Not Subject To PR1A or PR1B Pr1DJUNIOR OLIVONo ratings yet
- EN200 Naval Engineering Chapter 3 PDFDocument42 pagesEN200 Naval Engineering Chapter 3 PDFanusha_wiproNo ratings yet
- Basic of Naval ArchitectureDocument5 pagesBasic of Naval ArchitectureJUNIOR OLIVONo ratings yet
- SD 1.5.1 Hull FormDocument48 pagesSD 1.5.1 Hull Formadi_wirawan3837100% (1)
- ZF Marine Propulsion Systems Surface Drives Application FormDocument4 pagesZF Marine Propulsion Systems Surface Drives Application FormJUNIOR OLIVONo ratings yet
- Procedure for Reporting Hull FailuresDocument4 pagesProcedure for Reporting Hull FailuresJUNIOR OLIVONo ratings yet
- PR 02b pdf2658Document5 pagesPR 02b pdf2658JUNIOR OLIVONo ratings yet
- PR 02 pdf89Document1 pagePR 02 pdf89JUNIOR OLIVONo ratings yet
- Procedure for Reporting Hull FailuresDocument4 pagesProcedure for Reporting Hull FailuresJUNIOR OLIVONo ratings yet
- PR 02 pdf89Document1 pagePR 02 pdf89JUNIOR OLIVONo ratings yet
- Transparency of Classification and Statutory Information No.3Document3 pagesTransparency of Classification and Statutory Information No.3JUNIOR OLIVONo ratings yet
- Cat 3406 Fuel ConsumptionDocument5 pagesCat 3406 Fuel Consumptionayman akrab100% (2)
- PR 02b pdf2658Document5 pagesPR 02b pdf2658JUNIOR OLIVONo ratings yet
- Transparency of Classification and Statutory Information No.3Document3 pagesTransparency of Classification and Statutory Information No.3JUNIOR OLIVONo ratings yet
- Evinrude E-Tec G2: Installation Color SHAFT LENGTH - In. (MM) Steering Model No. WEIGHT - LB (KG)Document1 pageEvinrude E-Tec G2: Installation Color SHAFT LENGTH - In. (MM) Steering Model No. WEIGHT - LB (KG)JUNIOR OLIVONo ratings yet
- Pr1D Procedure For Class Entry of Ships Not Subject To PR1A or PR1B Pr1DDocument6 pagesPr1D Procedure For Class Entry of Ships Not Subject To PR1A or PR1B Pr1DJUNIOR OLIVONo ratings yet
- Iacs Procedures Vol 1 Rev 12 CLNDocument133 pagesIacs Procedures Vol 1 Rev 12 CLNsathi11189No ratings yet
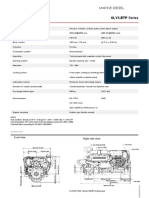
- 6LY3-ETP Series: Marine Diesel EnginesDocument4 pages6LY3-ETP Series: Marine Diesel EnginesJUNIOR OLIVONo ratings yet
- Introduction To Fluid Mechanics: Chapter 2 - FluidsDocument35 pagesIntroduction To Fluid Mechanics: Chapter 2 - FluidsCool DouglasNo ratings yet
- Unit 2-Fluid MechanicsDocument27 pagesUnit 2-Fluid MechanicsApechRanger100% (1)
- Hydraulics 2Document6 pagesHydraulics 2Raqz TVNo ratings yet
- C-857-14 Minimum Design Loading PDFDocument6 pagesC-857-14 Minimum Design Loading PDFMichael VanWagenenNo ratings yet
- Fluid Mechanics and Hydraulics (Gillesania) - Part 2Document44 pagesFluid Mechanics and Hydraulics (Gillesania) - Part 2Briones Gogoc50% (4)
- 206 Spring 2013 PDFDocument37 pages206 Spring 2013 PDFcombatps133% (3)
- 22CL 8.gas MigrationDocument48 pages22CL 8.gas MigrationEslam Atif AzkolNo ratings yet
- Fluid Mechanics Worked Examples For EngineersDocument164 pagesFluid Mechanics Worked Examples For EngineersKarishma Juttun95% (37)
- Chapter Four Forces On Submerged Surfaces in Static FluidsDocument24 pagesChapter Four Forces On Submerged Surfaces in Static FluidsŚæd ÖsmąņNo ratings yet
- AFE SettlementAnalysis 2013 WebDocument134 pagesAFE SettlementAnalysis 2013 Webntah84100% (1)
- A Review Drill-Stem Testing Techniques and Analysis: Feature ArticleDocument10 pagesA Review Drill-Stem Testing Techniques and Analysis: Feature ArticleEduardo GarcíaNo ratings yet
- Unit 3.1 - Hydrostatic ForcesDocument29 pagesUnit 3.1 - Hydrostatic ForcesIshmael MvunyiswaNo ratings yet
- Level Measurement Methods Using Hydrostatic PressureDocument22 pagesLevel Measurement Methods Using Hydrostatic PressureJunaid JohnsonNo ratings yet
- Hydrostatic Forces On SurfacesDocument28 pagesHydrostatic Forces On SurfacesKarla Buenaflor100% (1)
- Fluid Mechanics and Hydraulics TermsDocument5 pagesFluid Mechanics and Hydraulics Termssamuel elegadoNo ratings yet
- CE2202 Fluid Mechanics NOTESDocument0 pagesCE2202 Fluid Mechanics NOTESGp ChengNo ratings yet
- Study On The Volumetric Behavior of Base Oils, Brines, and Drilling Fluids Under Extreme Temperatures and PressuresDocument11 pagesStudy On The Volumetric Behavior of Base Oils, Brines, and Drilling Fluids Under Extreme Temperatures and PressuresGabriel VargasNo ratings yet
- HydrostaticsDocument34 pagesHydrostaticsTarek MohamedNo ratings yet
- Introduction To Hydraulics and PneumaticsDocument309 pagesIntroduction To Hydraulics and PneumaticsH k86% (7)
- QUIZ SOLUTIONS for BESAVILLA REVIEW CENTER ONLINEDocument4 pagesQUIZ SOLUTIONS for BESAVILLA REVIEW CENTER ONLINEVon Andrei MedinaNo ratings yet
- Cours de Mécanique Des Fluides Finale-.Fr - enDocument30 pagesCours de Mécanique Des Fluides Finale-.Fr - enWail DzNo ratings yet
- Drilling TechniquesDocument9 pagesDrilling TechniquesHafiz DaudNo ratings yet
- Mechanical Engineering Science 1: Fluid Mechanics: Tutorial 7 - Hydrostatic ForcesDocument7 pagesMechanical Engineering Science 1: Fluid Mechanics: Tutorial 7 - Hydrostatic ForcesSabah MazoodNo ratings yet
- Modeling Hydrostatic Pressure With SOLIDWORKS SimulationDocument9 pagesModeling Hydrostatic Pressure With SOLIDWORKS Simulationlinhcdt3No ratings yet
- Stability Analysis Petrosamudra Oil Ship Tanker Using Maxsurf Software StabilityDocument27 pagesStability Analysis Petrosamudra Oil Ship Tanker Using Maxsurf Software StabilityNabilah S ZahraNo ratings yet
- Fluid Mechanics Ch4 MergedDocument80 pagesFluid Mechanics Ch4 Merged조민제No ratings yet
- SPE-106465-MS-P - Foam-Assisted Lift-Importance of Selection and ApplicationDocument5 pagesSPE-106465-MS-P - Foam-Assisted Lift-Importance of Selection and ApplicationkencasanovNo ratings yet
- Phy 102 Properties of Matter & WavesDocument76 pagesPhy 102 Properties of Matter & WavesMD NAYM MIANo ratings yet
- Astm D2837 (2001)Document14 pagesAstm D2837 (2001)Muzammil Khalil100% (3)
- Structural DesignDocument52 pagesStructural Designbaig951No ratings yet