You might also like
- Tools and Equipment: 2-08 Changing Suction ModuleDocument2 pagesTools and Equipment: 2-08 Changing Suction ModuleAbdul Hameed OmarNo ratings yet
- 2-07 1. Tools and Equipment: Changing LinersDocument2 pages2-07 1. Tools and Equipment: Changing LinersAbdul Hameed OmarNo ratings yet
- The First Principles A Scientist S Guide To The SpiritualDocument194 pagesThe First Principles A Scientist S Guide To The SpiritualVasco GuerreiroNo ratings yet
- Chapter 1-2-Drilling Components Systems Types PersonnelDocument140 pagesChapter 1-2-Drilling Components Systems Types Personnelbakri OmanNo ratings yet
- Extended Reach Drilling1 PDFDocument18 pagesExtended Reach Drilling1 PDFMayra Betancourt Dominguez100% (1)
- Young Tech Showcase - Reelwell Drilling MethodDocument2 pagesYoung Tech Showcase - Reelwell Drilling Methodlulalala8888100% (1)
- SPE 88446 Making Steerable Bits: Separating Side-Force From Side-CuttingDocument7 pagesSPE 88446 Making Steerable Bits: Separating Side-Force From Side-CuttingmsmsoftNo ratings yet
- A-2. System DesignDocument93 pagesA-2. System DesignDangolNo ratings yet
- Formation Pressure While Drilling Technology - Game Changer in Drilling Overpressured ReservoirsDocument6 pagesFormation Pressure While Drilling Technology - Game Changer in Drilling Overpressured ReservoirsJamalNo ratings yet
- Fundamentals of Drilling Engineering: MCQs and Workout Examples for Beginners and EngineersFrom EverandFundamentals of Drilling Engineering: MCQs and Workout Examples for Beginners and EngineersNo ratings yet
- Hoisting SystemDocument42 pagesHoisting SystemBadut Sarkas100% (3)
- Cheatsheet PDFDocument2 pagesCheatsheet PDFbfirepowerNo ratings yet
- 450 Final SolutionsDocument14 pages450 Final SolutionsWilliam Williams100% (2)
- Measurement While Drilling: Signal Analysis, Optimization and DesignFrom EverandMeasurement While Drilling: Signal Analysis, Optimization and DesignNo ratings yet
- Well Control Response PlanDocument50 pagesWell Control Response PlanUbed Ali SherNo ratings yet
- Drilling and Well ConstructionDocument36 pagesDrilling and Well ConstructionMarcio Nascimento BezerraNo ratings yet
- What Is Fishing Operation - Drilling Formulas and Drilling CalculationsDocument12 pagesWhat Is Fishing Operation - Drilling Formulas and Drilling CalculationsAmine MimoNo ratings yet
- Driller's Depth ErrorsDocument2 pagesDriller's Depth Errorsnyanya2007No ratings yet
- UAS Drill String Design and Hole ProblemDocument37 pagesUAS Drill String Design and Hole Problemsbaluwel100% (1)
- Well ControlDocument10 pagesWell ControlSamad Ali SiddiquiNo ratings yet
- Directional DrillingDocument32 pagesDirectional DrillingDante SchneiderNo ratings yet
- Theory and Technology of Drilling EngineeringDocument573 pagesTheory and Technology of Drilling EngineeringKhánh Tuyền Nguyễn ThịNo ratings yet
- Control System Configuration PDFDocument2 pagesControl System Configuration PDFjuliunNo ratings yet
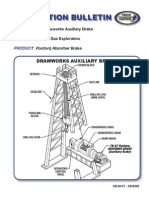
- AB-09-01 Drawworks Auxiliary BrakeDocument2 pagesAB-09-01 Drawworks Auxiliary BrakeAgohuvNo ratings yet
- Catálogo EIXO ZFDocument27 pagesCatálogo EIXO ZFOdirley JonesNo ratings yet
- Innovative Exploration Methods for Minerals, Oil, Gas, and Groundwater for Sustainable DevelopmentFrom EverandInnovative Exploration Methods for Minerals, Oil, Gas, and Groundwater for Sustainable DevelopmentA. K. MoitraNo ratings yet
- Summer Internship ON: Basics of Well Logging, Well Log Operations & Interpretation-Ongc Mehsana AssetDocument38 pagesSummer Internship ON: Basics of Well Logging, Well Log Operations & Interpretation-Ongc Mehsana AssetYaashpal Malik50% (2)
- IntroductionDocument18 pagesIntroductionEkkarat RattanaphraNo ratings yet
- 4 CP NS-01 BD Draft Part 2 Vol.2 EM Version 11 FINAL REV ADocument1,357 pages4 CP NS-01 BD Draft Part 2 Vol.2 EM Version 11 FINAL REV Asamarendra parida100% (1)
- Formation Testing: Supercharge, Pressure Testing, and Contamination ModelsFrom EverandFormation Testing: Supercharge, Pressure Testing, and Contamination ModelsNo ratings yet
- Extended Reach Drilling PDFDocument2 pagesExtended Reach Drilling PDFGina0% (1)
- Wave Propagation in Drilling, Well Logging and Reservoir ApplicationsFrom EverandWave Propagation in Drilling, Well Logging and Reservoir ApplicationsNo ratings yet
- Iot As A Service: Bo Li Mao Yang Hui Yuan Zhongjiang YanDocument502 pagesIot As A Service: Bo Li Mao Yang Hui Yuan Zhongjiang YanCristina VotoNo ratings yet
- Rock & Rock-Fluid Properties: Permeability & Relative PermeabilityDocument43 pagesRock & Rock-Fluid Properties: Permeability & Relative PermeabilityJorge Jiménez100% (1)
- 6th African Rift Geothermal Conference ProceedingsDocument9 pages6th African Rift Geothermal Conference Proceedingszeze_13No ratings yet
- Linear and Radial Flow FundamentalsDocument46 pagesLinear and Radial Flow FundamentalsJorge JiménezNo ratings yet
- SPE 151448 Casing Wear PaperDocument15 pagesSPE 151448 Casing Wear PaperLilyShiNo ratings yet
- Mwd-Manual PDFDocument151 pagesMwd-Manual PDFmanu pratap singhNo ratings yet
- Susan Weatherford's ResumeDocument2 pagesSusan Weatherford's ResumeSusan WeatherfordNo ratings yet
- Rig 12 Inventory SummaryDocument3 pagesRig 12 Inventory Summaryherysyam1980100% (1)
- Completion - Cementing and Perforating PDFDocument9 pagesCompletion - Cementing and Perforating PDFengineer1976No ratings yet
- Directional DrillingDocument16 pagesDirectional DrillingRajeev LochanamNo ratings yet
- SAOGE 2008 - Paper - Full Scale Verification of The Reelwell Drilling MethodDocument10 pagesSAOGE 2008 - Paper - Full Scale Verification of The Reelwell Drilling MethodBep De JongNo ratings yet
- Drilling Levels 3 and 4 Syllabus PDFDocument35 pagesDrilling Levels 3 and 4 Syllabus PDFGOKUL PRASADNo ratings yet
- Top Drive vs Rotary Table for Cost-Effective Geothermal DrillingDocument20 pagesTop Drive vs Rotary Table for Cost-Effective Geothermal DrillingjmScriNo ratings yet
- Optimization of Drilling Parameters With The Performance of Multilobe Positive Displacement Motor (PDM)Document8 pagesOptimization of Drilling Parameters With The Performance of Multilobe Positive Displacement Motor (PDM)drilling moneytree100% (1)
- Permian Basin Development WellsDocument8 pagesPermian Basin Development WellsPesireron RoberthNo ratings yet
- Model "Jyq" Mechanical-Hydraulic Drilling Jar: Instruction ManualDocument8 pagesModel "Jyq" Mechanical-Hydraulic Drilling Jar: Instruction ManualMarvin William Montes Cristo100% (1)
- Rig Components: The Hoisting SystemDocument8 pagesRig Components: The Hoisting SystemJohann DarnleyNo ratings yet
- Foraco Reverse Circulation DrillingDocument4 pagesForaco Reverse Circulation DrillingzapspazNo ratings yet
- Underbalanced DrillingDocument2 pagesUnderbalanced DrillingWilson WanNo ratings yet
- Well Planning Fundamentals for Oil ExplorationDocument33 pagesWell Planning Fundamentals for Oil Explorationsparda94No ratings yet
- Handout 20161126 Ispg - Drilling OperationDocument37 pagesHandout 20161126 Ispg - Drilling Operationtama_utmNo ratings yet
- Oil Well DesigningDocument15 pagesOil Well DesigningShashank SacamuriNo ratings yet
- Well Blueprint: Lost CirculationDocument8 pagesWell Blueprint: Lost CirculationapsekarNo ratings yet
- Stuck Pipe Lecture - 1 PDFDocument9 pagesStuck Pipe Lecture - 1 PDFAmar BenAmarNo ratings yet
- IADC/SPE 115283 Casing Drilling Technology As The Alternative of Drilling EfficiencyDocument10 pagesIADC/SPE 115283 Casing Drilling Technology As The Alternative of Drilling EfficiencyMicaela Flores Lanza100% (1)
- Advanced Technology Solutions For Next Generation HPHT WellsDocument15 pagesAdvanced Technology Solutions For Next Generation HPHT Wellsandrew sinagaNo ratings yet
- Tech Drilling Cementing CalculationsDocument0 pagesTech Drilling Cementing Calculationsadvantage025No ratings yet
- 2015 ROP Enhancement in Shales Through Osmotic Processes SPE IADC 173138 MSDocument19 pages2015 ROP Enhancement in Shales Through Osmotic Processes SPE IADC 173138 MSSteven MarinoffNo ratings yet
- Responsibilities During Drilling OperationsDocument1 pageResponsibilities During Drilling OperationsYougchu LuanNo ratings yet
- Pre-Spud Checklist # 4Document2 pagesPre-Spud Checklist # 4Yougchu LuanNo ratings yet
- Hydrocarbon Fluid Inclusions in Petroliferous BasinsFrom EverandHydrocarbon Fluid Inclusions in Petroliferous BasinsNo ratings yet
- Fall Protect11Document53 pagesFall Protect11Jorge JiménezNo ratings yet
- GEOL 6022 - Mod 5pDocument27 pagesGEOL 6022 - Mod 5pJorge JiménezNo ratings yet
- 2012 Module 3p (Single Gas) ModDocument52 pages2012 Module 3p (Single Gas) ModJorge JiménezNo ratings yet
- MacPhail School Worksite Inspection GuideDocument26 pagesMacPhail School Worksite Inspection GuideJorge JiménezNo ratings yet
- Emergency Reponse 2021Document26 pagesEmergency Reponse 2021Jorge JiménezNo ratings yet
- Ppe - 2021Document44 pagesPpe - 2021Jorge JiménezNo ratings yet
- Confined Space Safety TrainingDocument41 pagesConfined Space Safety TrainingJorge JiménezNo ratings yet
- Preguntas PetrobowlDocument21 pagesPreguntas PetrobowlJorge Jiménez100% (1)
- RESR 464, Assignment#1 (2021), Heavy Oil & Steam PropertiesDocument1 pageRESR 464, Assignment#1 (2021), Heavy Oil & Steam PropertiesJorge JiménezNo ratings yet
- Standard Task Procedure ExampleDocument1 pageStandard Task Procedure ExampleJorge JiménezNo ratings yet
- Critical Task 3 Column ExampleDocument1 pageCritical Task 3 Column ExampleJorge JiménezNo ratings yet
- Archive Temp DocumentDocument20 pagesArchive Temp DocumentJorge JiménezNo ratings yet
- Presentation Discrimination: by Jiménez JorgeDocument6 pagesPresentation Discrimination: by Jiménez JorgeJorge JiménezNo ratings yet
- Taller 1. Metodos de Recobro-George Hans Sterling Mora.Document10 pagesTaller 1. Metodos de Recobro-George Hans Sterling Mora.Jorge JiménezNo ratings yet
- Presentación Biorremediacion y FitorremediacionDocument21 pagesPresentación Biorremediacion y FitorremediacionJorge JiménezNo ratings yet
- Writing Essay SamplesDocument18 pagesWriting Essay SamplesJorge JiménezNo ratings yet
- GISClase2 EngDocument30 pagesGISClase2 EngJorge JiménezNo ratings yet
- Maps scales projections coordinate systemsDocument17 pagesMaps scales projections coordinate systemsJorge JiménezNo ratings yet
- GISClase2 EngDocument30 pagesGISClase2 EngJorge JiménezNo ratings yet
- How Do We Define HomelessnessDocument6 pagesHow Do We Define HomelessnessJorge JiménezNo ratings yet
- 2016 PetroBowl Rules RegulationsDocument15 pages2016 PetroBowl Rules RegulationsJorge JiménezNo ratings yet
- Presentation Discrimination: by Jiménez JorgeDocument6 pagesPresentation Discrimination: by Jiménez JorgeJorge JiménezNo ratings yet
- WpscatDocument76 pagesWpscatJorge JiménezNo ratings yet
- User Manual 4009600Document3 pagesUser Manual 4009600Ahmed ProlicNo ratings yet
- Produktkatalog BraDocument2 pagesProduktkatalog BraRodrigo ElhailNo ratings yet
- As Test 04Document6 pagesAs Test 04LearnchemNo ratings yet
- Mode of Grouped Data and MidrangeDocument16 pagesMode of Grouped Data and Midrangesfjs/olfdNo ratings yet
- Catalogo VPFT 4535Document91 pagesCatalogo VPFT 4535PRISCILA FAGUNDESNo ratings yet
- Thesis On Electronic PaymentDocument6 pagesThesis On Electronic Paymentgbvhhgpj100% (2)
- 3BUA000135R5001 DCI ConfigDocument34 pages3BUA000135R5001 DCI ConfigCristi CrseNo ratings yet
- Practical Application of Refrigerants R600A and R290 in Small Hermetic SystemsDocument20 pagesPractical Application of Refrigerants R600A and R290 in Small Hermetic SystemsTedy Corimanya SoriaNo ratings yet
- RatioandRegressionMethodofEstimation Lecture7 10Document30 pagesRatioandRegressionMethodofEstimation Lecture7 10mrpakistan444No ratings yet
- Inventory Management For Retail Companies: A Literature Review and Current TrendsDocument9 pagesInventory Management For Retail Companies: A Literature Review and Current Trendstop techi tamizhaNo ratings yet
- Las Tendencias Pedagógicas en América Latina. NassifDocument51 pagesLas Tendencias Pedagógicas en América Latina. NassifDora MuñozNo ratings yet
- Programming Assignment Unit 5 Solution v2Document3 pagesProgramming Assignment Unit 5 Solution v2Everything PromoNo ratings yet
- Haier Biomedical General Catalogue 2019 PDFDocument96 pagesHaier Biomedical General Catalogue 2019 PDFJean TorreblancaNo ratings yet
- Ablan, Arjay I. Other Examples of Quantitative Models For Decision Making SimulationDocument13 pagesAblan, Arjay I. Other Examples of Quantitative Models For Decision Making SimulationVJ CarbonellNo ratings yet
- Prospectus 2017 - 2018: Admissions OpenDocument36 pagesProspectus 2017 - 2018: Admissions Openmurukuti subbireddyNo ratings yet
- Triaxial Accelerometer With Integral Magnet (A0643TX)Document2 pagesTriaxial Accelerometer With Integral Magnet (A0643TX)ORAMAYNo ratings yet
- DO-260, DO-260A, DO-260B DifferencesDocument11 pagesDO-260, DO-260A, DO-260B DifferencesVitaly RybakovNo ratings yet
- 300nb Fire Water Line - BEEL - 071953Document2 pages300nb Fire Water Line - BEEL - 071953irshadiiitNo ratings yet
- Orbital and Linear Converter With Autotuning: ACT 401-xxx - ManualDocument37 pagesOrbital and Linear Converter With Autotuning: ACT 401-xxx - ManualGeraldo Candido de Azevedo NetoNo ratings yet
- What Is An IP AddressDocument5 pagesWhat Is An IP AddressM.h. PulokNo ratings yet
- Contratto Di Vendita Barca24 CH - PDFDocument14 pagesContratto Di Vendita Barca24 CH - PDFIonut VoicuNo ratings yet
- IrctcDocument2 pagesIrctcSaurabh SinghNo ratings yet
- Teaching and Learning Continuity Amid and Beyond The PandemicDocument5 pagesTeaching and Learning Continuity Amid and Beyond The PandemicAmbbie Porras ManaliliNo ratings yet
- Endterm Algebra 2019 TT01Document1 pageEndterm Algebra 2019 TT01khang nguyễnNo ratings yet