You might also like
- Transmission, IdentificationDocument2 pagesTransmission, IdentificationHumberto LojanNo ratings yet
- V A35d A40d Lowp 211 4170 0304Document8 pagesV A35d A40d Lowp 211 4170 0304ahmad fikriNo ratings yet
- Research Misconduct As White-Collar Crime - A Criminological Approach (PDFDrive)Document267 pagesResearch Misconduct As White-Collar Crime - A Criminological Approach (PDFDrive)Ambeswar PhukonNo ratings yet
- Hadoop Installation Manual 2.odtDocument20 pagesHadoop Installation Manual 2.odtGurasees SinghNo ratings yet
- Chapter7 DigitalData 2Document217 pagesChapter7 DigitalData 2orizaNo ratings yet
- LAB 3 ENERGY LOSS IN PIPE AND FITTINGS - 23sept2016Document9 pagesLAB 3 ENERGY LOSS IN PIPE AND FITTINGS - 23sept2016faezahjalalNo ratings yet
- MTL 411: Functional Analysis: 1 Hahn-Banach TheoremsDocument7 pagesMTL 411: Functional Analysis: 1 Hahn-Banach TheoremsAmbeswar PhukonNo ratings yet
- MSC Econometrics (Ec402) : 2021-2022 Problem Set #3Document3 pagesMSC Econometrics (Ec402) : 2021-2022 Problem Set #3Yash PatelNo ratings yet
- Mixing ProblemsDocument16 pagesMixing ProblemsRamesh SakibandaNo ratings yet
- 4.1 General Theory of NTH Order Linear EquationsDocument19 pages4.1 General Theory of NTH Order Linear EquationsMohNajiNo ratings yet
- Calogero-Moser Hierarchy and KP HierarchyDocument8 pagesCalogero-Moser Hierarchy and KP Hierarchyhelmantico1970No ratings yet
- Chap1 PDFDocument25 pagesChap1 PDFDyl NicollNo ratings yet
- 11 - Quadratic Forms and EllipsoidsDocument21 pages11 - Quadratic Forms and EllipsoidsMatheus DomingosNo ratings yet
- Problem Set 3.: Solution 7.1Document7 pagesProblem Set 3.: Solution 7.1UniqueSabujNo ratings yet
- QK Contacts With Non-Informed People. at Time T, It Is: DT N NDocument15 pagesQK Contacts With Non-Informed People. at Time T, It Is: DT N NAnonymous 3J1EvGNo ratings yet
- STRPM1405 (4) 48034 5 18Document14 pagesSTRPM1405 (4) 48034 5 18rashmi.sharma.rs.mat18No ratings yet
- Math 333 Higher Order Linear Differential Equations: Kenyon College Paquind@kenyon - EduDocument4 pagesMath 333 Higher Order Linear Differential Equations: Kenyon College Paquind@kenyon - EduDrazen Emir Lim-Barraca Bernardo-LegaspiNo ratings yet
- 1 Basic Linear AlgebraDocument6 pages1 Basic Linear AlgebraDevendraReddyPoreddyNo ratings yet
- 2250 Matrix ExponentialDocument7 pages2250 Matrix Exponentialkanet17No ratings yet
- QUESTION 1 (5 + 5 + 1 + 0.5 + 0.5 + 3 15 Marks)Document5 pagesQUESTION 1 (5 + 5 + 1 + 0.5 + 0.5 + 3 15 Marks)jkleinhans.jkNo ratings yet
- MATH 219: Spring 2021-22Document6 pagesMATH 219: Spring 2021-22HesapNo ratings yet
- 3-Estimation With HeteroscedasticityDocument12 pages3-Estimation With HeteroscedasticityDavide MeottoNo ratings yet
- Trinomial DistributionDocument4 pagesTrinomial DistributionReevu ThapaNo ratings yet
- T X T Y: Practice Assignment For Discussion On FridayDocument1 pageT X T Y: Practice Assignment For Discussion On FridaywhoareyaNo ratings yet
- Tutorial 4LDSDocument3 pagesTutorial 4LDSshivendra.singh.vermaNo ratings yet
- Homework4 SebastianDocument18 pagesHomework4 SebastianMd Nur-A-Adam DonyNo ratings yet
- Important Facts About The Fundamental MatrixDocument4 pagesImportant Facts About The Fundamental Matrixaquz deepNo ratings yet
- Review of Eigenvalues/eigenvectors in Linear Algebra: Example 1Document3 pagesReview of Eigenvalues/eigenvectors in Linear Algebra: Example 1yaniv077No ratings yet
- The Spectral Decomposition: 1 N N J J J J J J 1 1 T 1 N N T NDocument7 pagesThe Spectral Decomposition: 1 N N J J J J J J 1 1 T 1 N N T Nशिवम् सुनील कुमारNo ratings yet
- Stat 111Document7 pagesStat 111EricNo ratings yet
- Axioms: Some Identities For Euler and Bernoulli Polynomials and Their ZerosDocument19 pagesAxioms: Some Identities For Euler and Bernoulli Polynomials and Their ZerosasidoNo ratings yet
- Tutorial On Multivariate Logistic Regression: Javier R. Movellan July 23, 2006Document9 pagesTutorial On Multivariate Logistic Regression: Javier R. Movellan July 23, 2006Vu Duc Hoang VoNo ratings yet
- Mathematics II (Engineering) - EM203/MM283 The Laplace TransformDocument6 pagesMathematics II (Engineering) - EM203/MM283 The Laplace TransformBhoszx Carl DoradoNo ratings yet
- Quiz ConvolutionDocument5 pagesQuiz ConvolutionGeorge KaragiannidisNo ratings yet
- Scientific Computing - LESSON 10: Polynomial Interpolation - Computational Methods 1Document4 pagesScientific Computing - LESSON 10: Polynomial Interpolation - Computational Methods 1Lee Hei LongNo ratings yet
- Coordinate-Free Approach To Trace and DeterminantDocument3 pagesCoordinate-Free Approach To Trace and DeterminantcuriosityNo ratings yet
- Presu 12Document30 pagesPresu 12Jose Luis GiriNo ratings yet
- Derivation of Normal EquationsDocument7 pagesDerivation of Normal EquationsMuhammad UsmanNo ratings yet
- Lectures On Curve Fitting With Matlab: Mattie/Lectures/Curvefitting PDFDocument15 pagesLectures On Curve Fitting With Matlab: Mattie/Lectures/Curvefitting PDFAhmed AlanaziNo ratings yet
- 2019 AMAM Exam PaperDocument3 pages2019 AMAM Exam PaperzeliawillscumbergNo ratings yet
- Chapter 08 - Linear TransformationsDocument35 pagesChapter 08 - Linear TransformationsTsiry TsilavoNo ratings yet
- Adv Exam PDFDocument2 pagesAdv Exam PDFChunhui ZhaoNo ratings yet
- 2020 AMAM Exam PaperDocument4 pages2020 AMAM Exam PaperzeliawillscumbergNo ratings yet
- Act Int - Tarea 6 RevisadaDocument10 pagesAct Int - Tarea 6 RevisadaLuis RamosNo ratings yet
- Lecture 3 Fourier SeriesDocument10 pagesLecture 3 Fourier SeriesShannon DayNo ratings yet
- Ijdev10n1 06Document16 pagesIjdev10n1 06bhushanam kosuriNo ratings yet
- 4 E GVQZ 7 TGC SW GDW KRR 0 GP HDAB US@F9 Pu:Ho R"ds Gwe N9 IoDocument1 page4 E GVQZ 7 TGC SW GDW KRR 0 GP HDAB US@F9 Pu:Ho R"ds Gwe N9 Ioheaan.lasaiNo ratings yet
- 31 JanDocument7 pages31 JannhuzoraNo ratings yet
- Final - ST4238 1f6mnp9Document5 pagesFinal - ST4238 1f6mnp9Raihan Masyal HaidarNo ratings yet
- Buckingham's Pi-Theorem: TheoryDocument4 pagesBuckingham's Pi-Theorem: TheorymlkndnzNo ratings yet
- OrthogonalDocument25 pagesOrthogonalPaulus Fernando AritonangNo ratings yet
- Structural Element Stiffness Matrices and Mass Matrices: 1 PreliminariesDocument28 pagesStructural Element Stiffness Matrices and Mass Matrices: 1 PreliminariesZahid RahmanNo ratings yet
- ProjectMath-1 MathDocument20 pagesProjectMath-1 MathAnirban MandalNo ratings yet
- Laplace Transform C4 - StudentsDocument21 pagesLaplace Transform C4 - StudentsJing ZeNo ratings yet
- Directional Derivatives and The Gradient: RemarkDocument4 pagesDirectional Derivatives and The Gradient: RemarkHesham ArifNo ratings yet
- Eigenvalues and EigenvectorsDocument23 pagesEigenvalues and EigenvectorsViorel AdirvaNo ratings yet
- 1 How Observables Generate Symmetries: Classical Mechanics, Lecture 10Document2 pages1 How Observables Generate Symmetries: Classical Mechanics, Lecture 10bgiangre8372No ratings yet
- Mathgen 1585323432Document11 pagesMathgen 1585323432IvanAnusicNo ratings yet
- FIS-502: Mathematical Physics I: Assignment 6Document4 pagesFIS-502: Mathematical Physics I: Assignment 6Tanya0% (1)
- Symmetry: Noether's Theorem and SymmetryDocument21 pagesSymmetry: Noether's Theorem and SymmetryIqra WahidNo ratings yet
- Homework8 Instructor PDFDocument6 pagesHomework8 Instructor PDFmsk123123No ratings yet
- 6.003: Signals and Systems-Fall 2002Document10 pages6.003: Signals and Systems-Fall 2002samsritiNo ratings yet
- 2007 03957Document21 pages2007 03957Eka Widya PratamaNo ratings yet
- Linear Algebra and Advanced Calculus: Somitra SanadhyaDocument11 pagesLinear Algebra and Advanced Calculus: Somitra SanadhyaAshish GuptaNo ratings yet
- EE120notesFa15 PDFDocument143 pagesEE120notesFa15 PDFnaibaf naibafNo ratings yet
- Tables of Generalized Airy Functions for the Asymptotic Solution of the Differential Equation: Mathematical Tables SeriesFrom EverandTables of Generalized Airy Functions for the Asymptotic Solution of the Differential Equation: Mathematical Tables SeriesNo ratings yet
- The Spectral Theory of Toeplitz Operators. (AM-99), Volume 99From EverandThe Spectral Theory of Toeplitz Operators. (AM-99), Volume 99No ratings yet
- 6 Completeness: 6.1 Cauchy SequencesDocument8 pages6 Completeness: 6.1 Cauchy SequencesAmbeswar PhukonNo ratings yet
- Office of The Principal:: Kokrajhar Govt. CollegeDocument6 pagesOffice of The Principal:: Kokrajhar Govt. CollegeAmbeswar PhukonNo ratings yet
- Altmetrics: An Overview and Evaluation: Online Information Review June 2017Document9 pagesAltmetrics: An Overview and Evaluation: Online Information Review June 2017Ambeswar PhukonNo ratings yet
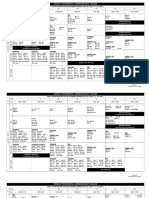
- Routine Distribution - FullDocument1 pageRoutine Distribution - FullAmbeswar PhukonNo ratings yet
- CalculuswithGeometry PDFDocument931 pagesCalculuswithGeometry PDFbogoeskiNo ratings yet
- 6 Continuous Functions: 6.1 Definition and ExamplesDocument5 pages6 Continuous Functions: 6.1 Definition and ExamplesAmbeswar PhukonNo ratings yet
- Calculus and Analytic Geometry (9th Edition) (PDFDrive)Document1,281 pagesCalculus and Analytic Geometry (9th Edition) (PDFDrive)Ambeswar Phukon100% (6)
- BSc-Math-Hon-CBCS (2020)Document42 pagesBSc-Math-Hon-CBCS (2020)Ambeswar PhukonNo ratings yet
- Department of Mathematical Sciences Bodoland University, Kokrajhar (CBCS Syllabus) 2019-2020Document9 pagesDepartment of Mathematical Sciences Bodoland University, Kokrajhar (CBCS Syllabus) 2019-2020Ambeswar PhukonNo ratings yet
- PST FillDocument37 pagesPST FillAmbeswar PhukonNo ratings yet
- Tangles and Connectivity in Graphs: Abstract. This Paper Is A Short Introduction To The Theory of TanglesDocument19 pagesTangles and Connectivity in Graphs: Abstract. This Paper Is A Short Introduction To The Theory of TanglesAmbeswar PhukonNo ratings yet
- 6 Continuous Functions: 6.1 Definition and ExamplesDocument5 pages6 Continuous Functions: 6.1 Definition and ExamplesAmbeswar PhukonNo ratings yet
- BSC - Math (H) - 1st SemDocument7 pagesBSC - Math (H) - 1st SemAmbeswar PhukonNo ratings yet
- MA - MSC in Mathematics (CBCS-CO-2019) PDFDocument36 pagesMA - MSC in Mathematics (CBCS-CO-2019) PDFAmbeswar PhukonNo ratings yet
- s13054 020 2751 8Document13 pagess13054 020 2751 8Mayra Elizabeth RodriguezNo ratings yet
- ME 2201-Lecture 4 (Mechanical Properties of Material)Document29 pagesME 2201-Lecture 4 (Mechanical Properties of Material)fontawesome111No ratings yet
- Capacitance and DielectricsDocument47 pagesCapacitance and DielectricsWael DoubalNo ratings yet
- Quantitative Research DesignDocument19 pagesQuantitative Research DesignAli Ahmed GhouriNo ratings yet
- Operations and Maintenance Manual: Spot Smoke Vents mcr-PROLIGHT - C, E, NG-A TypesDocument26 pagesOperations and Maintenance Manual: Spot Smoke Vents mcr-PROLIGHT - C, E, NG-A TypesConstantin GubavuNo ratings yet
- Ergonomic Design of Benthandled Culinary Spatula For Female Cooks Stirfrying Task 2157 7110 1000476Document5 pagesErgonomic Design of Benthandled Culinary Spatula For Female Cooks Stirfrying Task 2157 7110 1000476Margerita RakićNo ratings yet
- 1click CMDDocument1 page1click CMDNacho HozNo ratings yet
- En ZymologyDocument6 pagesEn ZymologyNathaniel Derige AndesNo ratings yet
- Epsilon GMDocument3 pagesEpsilon GMIván GarcíaNo ratings yet
- A Quantitative Landauer's PrincipleDocument16 pagesA Quantitative Landauer's PrinciplelupinorionNo ratings yet
- Analyzing Carsh Dumps in Solaris Using MDB and SCATDocument15 pagesAnalyzing Carsh Dumps in Solaris Using MDB and SCATMohaideenNo ratings yet
- Om3 CH 16 Quality Control and SPC CompressDocument19 pagesOm3 CH 16 Quality Control and SPC Compressபாட்டாளி பிரபாகர் மேலையூர்No ratings yet
- 9700 s10 Ms 21Document6 pages9700 s10 Ms 21ClairDeLune123No ratings yet
- Brute Force Attack With Burp Suite: Adita - Si: Maximize Information System Value For BusinessDocument35 pagesBrute Force Attack With Burp Suite: Adita - Si: Maximize Information System Value For Businessbudi.hw748No ratings yet
- Design of Seismic ArresterDocument3 pagesDesign of Seismic ArresterChandan vatsNo ratings yet
- 1 2 3cm 4cm 5cm 6cm CM CM: Multiple-Choice Questions 1986 Take G 10 m/s2Document16 pages1 2 3cm 4cm 5cm 6cm CM CM: Multiple-Choice Questions 1986 Take G 10 m/s2sliversniperNo ratings yet
- Sample Corporate Finance Exam IiDocument3 pagesSample Corporate Finance Exam IiScott Yao Lun ShihNo ratings yet
- Soil Mechanics-IDocument8 pagesSoil Mechanics-IMilan GhoshNo ratings yet
- Intro To BHJDocument38 pagesIntro To BHJRajni SharmaNo ratings yet
- Aida ReportDocument32 pagesAida ReportBilly ChristouNo ratings yet
- Shift Selector Brochure 020113Document18 pagesShift Selector Brochure 020113Yerko Abarca PintoNo ratings yet
- 21 - M - SC - Computer Science &IT Syllabus (2017-18)Document33 pages21 - M - SC - Computer Science &IT Syllabus (2017-18)Kishore KumarNo ratings yet
- Innova Ohms MeterDocument1 pageInnova Ohms MeterSourabh ChoudharyNo ratings yet
- Ap Physics C - Homework 8, Oscillations: AnswersDocument1 pageAp Physics C - Homework 8, Oscillations: AnswersRegina LinNo ratings yet
- 14 PoissonExponentialDocument14 pages14 PoissonExponentialrasha assafNo ratings yet