You might also like
- ODEsDocument13 pagesODEswaalihabuxNo ratings yet
- MATH 219: Spring 2021-22Document9 pagesMATH 219: Spring 2021-22HesapNo ratings yet
- Final Exam Review SolutionsDocument15 pagesFinal Exam Review SolutionsNiky KucingNo ratings yet
- M244: Solutions To Final Exam Review: 2 DX DTDocument15 pagesM244: Solutions To Final Exam Review: 2 DX DTheypartygirlNo ratings yet
- MA3220 AY08-09 Sem1Document3 pagesMA3220 AY08-09 Sem1paperforfreeNo ratings yet
- Second-Order Differential Equations: General SolutionsDocument12 pagesSecond-Order Differential Equations: General SolutionsZohaib ShabirNo ratings yet
- Sample Solution 1Document10 pagesSample Solution 1박정현No ratings yet
- The Integrating Factor Method (Sect. 1.1) : Constant Coefficients. The Initial Value ProblemDocument9 pagesThe Integrating Factor Method (Sect. 1.1) : Constant Coefficients. The Initial Value ProblemMohamed MenaaNo ratings yet
- Em2 Solved Problems-Ode Phabala 2003Document9 pagesEm2 Solved Problems-Ode Phabala 2003ferdinand zdravaNo ratings yet
- Linear SystemsDocument5 pagesLinear SystemsVedant GavhaneNo ratings yet
- Chapter 1Document40 pagesChapter 1Santiago Garrido BullónNo ratings yet
- Notes-2nd Order ODE Pt1Document37 pagesNotes-2nd Order ODE Pt1lebsework1801No ratings yet
- MATH 2930 - Worksheet 14 SolutionsDocument5 pagesMATH 2930 - Worksheet 14 SolutionsBrimwoodboyNo ratings yet
- 4 2-NotesDocument3 pages4 2-NotesJiggy Lawrence BathanNo ratings yet
- Cauchy - Euler's Second Order Homogeneous Differential Equations @@@@@@Document5 pagesCauchy - Euler's Second Order Homogeneous Differential Equations @@@@@@Marwan ElsayedNo ratings yet
- First Order Differential EquationsDocument18 pagesFirst Order Differential Equationsshan kumarNo ratings yet
- Basic differential equations cheat sheetDocument3 pagesBasic differential equations cheat sheetpedrodotnetNo ratings yet
- Linear systems of differential equationsDocument10 pagesLinear systems of differential equationsElvis Gutierrez GonzalesNo ratings yet
- 2nd To 1st OrderDocument29 pages2nd To 1st OrderAdithya ChandrasekaranNo ratings yet
- Lecture2 ODEDocument16 pagesLecture2 ODEhoungjunhong03No ratings yet
- DIFFERENTIAL EQUATIONS PROBLEM SHEETDocument2 pagesDIFFERENTIAL EQUATIONS PROBLEM SHEETHarshvardhan SinghNo ratings yet
- Linear Differential EquationsDocument7 pagesLinear Differential Equationsseqsi boiNo ratings yet
- Notes Unit-5 MAT211BTDocument22 pagesNotes Unit-5 MAT211BTm2005anojrNo ratings yet
- Intro. To Differential EquationDocument127 pagesIntro. To Differential EquationWASEEM_AKHTERNo ratings yet
- Answers Jan13Document6 pagesAnswers Jan13PythonraptorNo ratings yet
- SLT Olympiad 2020: Problem 1Document4 pagesSLT Olympiad 2020: Problem 1Frente ProgresistBecarixsNo ratings yet
- Auxiliary Equations With Complex Roots: 1 Introduction To Exponentials and Complex NumbersDocument6 pagesAuxiliary Equations With Complex Roots: 1 Introduction To Exponentials and Complex NumbersHammad RiazNo ratings yet
- Aitchison Hay Solutions 1 PDFDocument37 pagesAitchison Hay Solutions 1 PDFJovan JovanovicNo ratings yet
- Notes On ExercisesDocument44 pagesNotes On ExercisesYokaNo ratings yet
- MATH251 Worksheet 2Document21 pagesMATH251 Worksheet 2KhanhNo ratings yet
- Diff Eq FormulasDocument10 pagesDiff Eq Formulasroi_marketingNo ratings yet
- Cauchy - Euler Method - Diff EqnsDocument6 pagesCauchy - Euler Method - Diff EqnsSajoo Bhaskaran K100% (1)
- Sturm-Liouville Problems: Generalized Fourier Series: X X (0) 0, X (L) 0Document13 pagesSturm-Liouville Problems: Generalized Fourier Series: X X (0) 0, X (L) 0Sebastian ReguanNo ratings yet
- Substitutions in Differential Equations and SystemsDocument11 pagesSubstitutions in Differential Equations and SystemsEuwan Tyrone PriasNo ratings yet
- Ignore The Topics Unmentioned Before Midterm Exercises Set 1Document9 pagesIgnore The Topics Unmentioned Before Midterm Exercises Set 1silatahmaz6No ratings yet
- Chapter 02 2nd-Order Linear ODEsDocument18 pagesChapter 02 2nd-Order Linear ODEsSider HsiaoNo ratings yet
- 202y05mt1 PDFDocument3 pages202y05mt1 PDFIvanovka03No ratings yet
- Week 6 SolutionsDocument4 pagesWeek 6 Solutionsemmaagoh123No ratings yet
- Math 3410Document30 pagesMath 3410casual_mango100% (1)
- 1 ST Order Differences Between Linear Nonlinear EquationsDocument4 pages1 ST Order Differences Between Linear Nonlinear EquationsCharbel KaddoumNo ratings yet
- On Complex Extrapolated Successive Overrelaxation (Esor) : Some Theoretical ResultsDocument16 pagesOn Complex Extrapolated Successive Overrelaxation (Esor) : Some Theoretical Resultslight crow songNo ratings yet
- DAEsDocument40 pagesDAEsfaizabbk1709No ratings yet
- Herbert Kreyszig, Erwin Kreyszig - Student Solutions Manual and Study Guide To Advanced Engineering Mathematics (Volume 1) - Wiley (2012)Document256 pagesHerbert Kreyszig, Erwin Kreyszig - Student Solutions Manual and Study Guide To Advanced Engineering Mathematics (Volume 1) - Wiley (2012)يوسف سعد محمودNo ratings yet
- ECE 3620 Lecture 5 - Zero-Input Solution of Differential EquationsDocument6 pagesECE 3620 Lecture 5 - Zero-Input Solution of Differential EquationsbaruaeeeNo ratings yet
- ODE - S.GhoraiDocument92 pagesODE - S.GhoraiHarsh BihanyNo ratings yet
- MA3264Tutorial1 Solutions by LinDocument10 pagesMA3264Tutorial1 Solutions by LinTim CookNo ratings yet
- Second Order Linear Equations: RT 0 RT 00 2 RT 2 RT RT 2 1 t/3 2 t/2Document26 pagesSecond Order Linear Equations: RT 0 RT 00 2 RT 2 RT RT 2 1 t/3 2 t/2ashleyNo ratings yet
- F08W07 PDFDocument14 pagesF08W07 PDFPatricia PazNo ratings yet
- 1.1 Basic Concepts. Modeling: Engineering Problems Physical Problems Economic ProblemsDocument24 pages1.1 Basic Concepts. Modeling: Engineering Problems Physical Problems Economic Problems박태영No ratings yet
- Differential Equations: First Order Differential EquationDocument53 pagesDifferential Equations: First Order Differential Equationjesús Iván Santamaria najarNo ratings yet
- Elementary Differential Equations: Notice: This Material Must Not Be Used As A Substitute For Attending The LecturesDocument34 pagesElementary Differential Equations: Notice: This Material Must Not Be Used As A Substitute For Attending The LecturesDelvina HartrianaNo ratings yet
- Det Eval ManDocument4 pagesDet Eval ManNaveen Kumar SinghNo ratings yet
- Contoh Soal Pesamaan DiferensialDocument14 pagesContoh Soal Pesamaan DiferensialSanggul SimanullangNo ratings yet
- 4 Second Order Linear ODEs 1Document64 pages4 Second Order Linear ODEs 1Lanz CaballaNo ratings yet
- Example 1.2.5.: 1.2. Linear Variable Coefficient Equations 19Document3 pagesExample 1.2.5.: 1.2. Linear Variable Coefficient Equations 19Mohamed MedhatNo ratings yet
- Machine Learning HomeworkDocument8 pagesMachine Learning HomeworkWessel van DamNo ratings yet
- Direct Method SlidesDocument44 pagesDirect Method SlideszazarNo ratings yet
- MATH2352 Differential Equations and Applications Name: Coursework 6 ID: Problem 1. Solve The IVP (X (T) X 5y y (T) X 3y For X (0) 1, y (0) 1Document2 pagesMATH2352 Differential Equations and Applications Name: Coursework 6 ID: Problem 1. Solve The IVP (X (T) X 5y y (T) X 3y For X (0) 1, y (0) 1John ChanNo ratings yet
- Introductory Differential Equations: with Boundary Value Problems, Student Solutions Manual (e-only)From EverandIntroductory Differential Equations: with Boundary Value Problems, Student Solutions Manual (e-only)No ratings yet
- Open University of Mauritius ODL Fees For Citizens of SADC and IORA Countries (USD) FEES 2022 (ECTS)Document2 pagesOpen University of Mauritius ODL Fees For Citizens of SADC and IORA Countries (USD) FEES 2022 (ECTS)Lawson SangoNo ratings yet
- Ixar Academy Cellphone Repair SyllabusPDFDocument3 pagesIxar Academy Cellphone Repair SyllabusPDFLawson SangoNo ratings yet
- Advanced Diploma in Electrical Engineering Level 5Document2 pagesAdvanced Diploma in Electrical Engineering Level 5Lawson SangoNo ratings yet
- 509 Nov 2016Document13 pages509 Nov 2016Lawson SangoNo ratings yet
- B.Tech. Degree in Instrumentation and Control Engineering SyllabusDocument61 pagesB.Tech. Degree in Instrumentation and Control Engineering SyllabusWilson dela FuenteNo ratings yet
- South African Embassy Harare Critical Skills Work Visa ApplicationDocument2 pagesSouth African Embassy Harare Critical Skills Work Visa ApplicationmahahajNo ratings yet
- 502 Sample PaperDocument6 pages502 Sample PaperLawson SangoNo ratings yet
- Scholtz: Web DeveloperDocument3 pagesScholtz: Web DeveloperLawson SangoNo ratings yet
- 506 Sample PaperDocument2 pages506 Sample PaperLawson SangoNo ratings yet
- 9208-11 l5 Qualification Handbook v1 PDFDocument70 pages9208-11 l5 Qualification Handbook v1 PDFLawson SangoNo ratings yet
- Job Centre - Petrozim Clerk & Domboshava Institute VacanciesDocument8 pagesJob Centre - Petrozim Clerk & Domboshava Institute VacanciesLawson SangoNo ratings yet
- NDip and BTech QADocument2 pagesNDip and BTech QALawson SangoNo ratings yet
- Zimbabwe Advanced Level Business Studies Exam Syllabus 2008-2012Document32 pagesZimbabwe Advanced Level Business Studies Exam Syllabus 2008-2012navimala8550% (2)
- Electrical and Electronic Materials Science 14.1Document239 pagesElectrical and Electronic Materials Science 14.1Krishnamani TiwariNo ratings yet
- Synchronous GeneratorsDocument50 pagesSynchronous GeneratorsRajAnandNo ratings yet
- Changes To Higher Education Qualifications in South AfricaDocument6 pagesChanges To Higher Education Qualifications in South AfricaCourtney PienaarNo ratings yet
- Times Tables BlankDocument2 pagesTimes Tables BlankLawson SangoNo ratings yet
- Trainee Electrical EngineerDocument3 pagesTrainee Electrical EngineerDixita ShuklaNo ratings yet
- Construction and operation of synchronous machinesDocument53 pagesConstruction and operation of synchronous machinesPhilip IsholaNo ratings yet
- Transformer Design and Manufacturing TrainingDocument16 pagesTransformer Design and Manufacturing TrainingLawson SangoNo ratings yet
- 9209 Level 5 Diploma in Civil Engineering Qualification Handbook v1-5Document60 pages9209 Level 5 Diploma in Civil Engineering Qualification Handbook v1-5Waldo Schaeffer0% (2)
- 226 Electrical Machine-IIDocument99 pages226 Electrical Machine-IINuri BerishaNo ratings yet
- Electrical Internship Position - Junior Electrical EngineerDocument2 pagesElectrical Internship Position - Junior Electrical EngineerLawson SangoNo ratings yet
- Analog Circuits GuideDocument16 pagesAnalog Circuits GuideLawson SangoNo ratings yet
- Synchronous GeneratorsDocument62 pagesSynchronous GeneratorsAkira ZamudioNo ratings yet
- Actom-Ep Brochure 2016Document12 pagesActom-Ep Brochure 2016tongaiNo ratings yet
- Grade Calculation Guidance For Ucas Purposes PDFDocument7 pagesGrade Calculation Guidance For Ucas Purposes PDFLawson SangoNo ratings yet
- Hiv Aids PolicyDocument1 pageHiv Aids PolicyLawson SangoNo ratings yet
- DESIGN OF 500kVA 11 0.415kV SUBSTATION O PDFDocument100 pagesDESIGN OF 500kVA 11 0.415kV SUBSTATION O PDFAshok TomarNo ratings yet
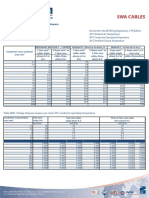
- Current Carrying Capacity in AmpereDocument1 pageCurrent Carrying Capacity in AmpereSSSNo ratings yet
- Third Term Exam-Wps Office-5Document5 pagesThird Term Exam-Wps Office-5Shonekan KhadijahNo ratings yet
- Early History of Soil-Structure InteractionDocument11 pagesEarly History of Soil-Structure InteractionjaswantNo ratings yet
- Modelling For Cruise Two-Dimensional Online Revenue Management SystemDocument7 pagesModelling For Cruise Two-Dimensional Online Revenue Management SystemBysani Vinod KumarNo ratings yet
- 4ma1 - j23 - 1h - Without AnsDocument25 pages4ma1 - j23 - 1h - Without AnsMariamNo ratings yet
- American Computer Science League ACSL Rules and Handbook PDFDocument47 pagesAmerican Computer Science League ACSL Rules and Handbook PDFJeffrey TangNo ratings yet
- Mathematics For Engineers ANTHONY CROFT 5edDocument1,285 pagesMathematics For Engineers ANTHONY CROFT 5edHema S rashid100% (4)
- Conic SectionDocument2 pagesConic SectionKurt Daniel SorianoNo ratings yet
- Peg SolitaireDocument6 pagesPeg Solitairealiska paprikaNo ratings yet
- Lesson 6: Scatter Plots: Student OutcomesDocument11 pagesLesson 6: Scatter Plots: Student OutcomesJasmine WilliamsNo ratings yet
- Diagnostic Test in Math /40: Ateneo de Manila High School - Tulong-Dunong TutoringDocument5 pagesDiagnostic Test in Math /40: Ateneo de Manila High School - Tulong-Dunong TutoringAntonio Luis BanzonNo ratings yet
- 08 - Gerring & Christenson (2017) Reading and ReviewingDocument19 pages08 - Gerring & Christenson (2017) Reading and ReviewingFerlanda LunaNo ratings yet
- SLG Math 10 Quarter 2 Week 5Document5 pagesSLG Math 10 Quarter 2 Week 5Darwin BondocNo ratings yet
- JEE Main 2014 Writeup AnalysisDocument4 pagesJEE Main 2014 Writeup AnalysisShubhamKhannaNo ratings yet
- References Math 2 Quarter 1Document5 pagesReferences Math 2 Quarter 1Maricel Pactor GastadorNo ratings yet
- Block 3 MECE 001 Unit 10Document16 pagesBlock 3 MECE 001 Unit 10Tanya Singh100% (1)
- Chemistry 531 The One-Dimensional Random WalkDocument11 pagesChemistry 531 The One-Dimensional Random WalkBJI ALUMNINo ratings yet
- An Organizational Perspective On Inventory Control Case StudyDocument12 pagesAn Organizational Perspective On Inventory Control Case StudyPrabhul PbNo ratings yet
- A Concise Introduction To Numerical AnalysisDocument213 pagesA Concise Introduction To Numerical AnalysisstanicadNo ratings yet
- Cambridge Assessment International Education: Mathematics 9709/72 October/November 2019Document11 pagesCambridge Assessment International Education: Mathematics 9709/72 October/November 2019larisha lamichhaneNo ratings yet
- Z TransformDocument56 pagesZ Transformcrux_123No ratings yet
- Advanced General Mathematics Worked Answers Enhanced Edition NO COPY WRITE INFRINGEMENT INTENDEDDocument418 pagesAdvanced General Mathematics Worked Answers Enhanced Edition NO COPY WRITE INFRINGEMENT INTENDEDNatasha Pettet50% (4)
- Math Linear Functions ProblemsDocument2 pagesMath Linear Functions ProblemsAlfie BurbosNo ratings yet
- Coursework2 ProblemsDocument4 pagesCoursework2 ProblemsMikolaj PisarczykowskiNo ratings yet
- Notice for reasonable use of exam questions and solutionsThe title "TITLE Notice for reasonable use of exam questions and solutionsDocument9 pagesNotice for reasonable use of exam questions and solutionsThe title "TITLE Notice for reasonable use of exam questions and solutionsHagen Seah100% (1)
- Unit 4567 Big IdeasDocument4 pagesUnit 4567 Big Ideasapi-321572202No ratings yet
- CircleDocument59 pagesCircleMaliney PohsNo ratings yet
- Practice 7Document20 pagesPractice 7Saifudin SajadiNo ratings yet
- Mark Scheme: Mathematics (Specification 6360) Mm1BDocument12 pagesMark Scheme: Mathematics (Specification 6360) Mm1BStephen GaskellNo ratings yet
- Distributed Arithmetic: An Efficient Technique for Inner Product CalculationsDocument16 pagesDistributed Arithmetic: An Efficient Technique for Inner Product CalculationsASHOK KUMAR SAHU ee20m040No ratings yet
- MatLabSlides PDFDocument215 pagesMatLabSlides PDFDanilo PequenoNo ratings yet