You might also like
- MIDTERMDocument12 pagesMIDTERMMarshall james G. RamirezNo ratings yet
- Programme Term-End Examination - ZR June, 2010: Bachelor'S DegreeDocument8 pagesProgramme Term-End Examination - ZR June, 2010: Bachelor'S DegreeVasudha SinghNo ratings yet
- Equations ForDocument2 pagesEquations For盧森丘No ratings yet
- Basic Enginering MathDocument154 pagesBasic Enginering Mathosm83132947No ratings yet
- Cal2 FE Sem2 1516Document3 pagesCal2 FE Sem2 1516Thảo Nguyễn Thị ThanhNo ratings yet
- 2 FortranDocument37 pages2 FortranislaihuslubNo ratings yet
- Math Exam Functions .Quadratic Equations - System.limits .DerivativesDocument2 pagesMath Exam Functions .Quadratic Equations - System.limits .DerivativeswaelNo ratings yet
- Week 8 Fourier SeriesDocument11 pagesWeek 8 Fourier SeriesLuqman NHNo ratings yet
- Mat3320 Ass3 SolDocument2 pagesMat3320 Ass3 SolRichard BeardNo ratings yet
- Review 3Document2 pagesReview 3mgs911No ratings yet
- MA2002 Tutorial8Document3 pagesMA2002 Tutorial8yu hanyueNo ratings yet
- Analysis4 Exoset03Document2 pagesAnalysis4 Exoset03Ayoub GHOULNo ratings yet
- Multivariable Func +partial Derrivative Çalışma SorularıDocument13 pagesMultivariable Func +partial Derrivative Çalışma Soruları247rxg9qr8No ratings yet
- Cheat Sheet SpringDocument6 pagesCheat Sheet SpringtheonetmobileNo ratings yet
- Maths-Pt-1 SolutionDocument6 pagesMaths-Pt-1 SolutionRaju SinghNo ratings yet
- Cal2 FE Sem3 1516Document4 pagesCal2 FE Sem3 1516Thảo Nguyễn Thị ThanhNo ratings yet
- DERIVATIVESDocument12 pagesDERIVATIVESmike capitoNo ratings yet
- Chapter 1 Multi Variable FunctionsDocument62 pagesChapter 1 Multi Variable FunctionsThu Thuỷ NguyễnNo ratings yet
- M5. Curve Fitting and InterpolationDocument10 pagesM5. Curve Fitting and Interpolationaisen agustinNo ratings yet
- JEE Main Full Test - 2 Hints & Solutions MathematicsDocument16 pagesJEE Main Full Test - 2 Hints & Solutions MathematicsMohammed Aftab AhmedNo ratings yet
- APP2Document3 pagesAPP2Dayana JimenezNo ratings yet
- Advanced Mathematics Tut 2Document4 pagesAdvanced Mathematics Tut 2hktang1802No ratings yet
- Tutorial 2 PDFDocument1 pageTutorial 2 PDFkamohelo tsoeuNo ratings yet
- Calculus I (MATH 1060 and 1061) Fall 2014 Review For The Final ExamDocument8 pagesCalculus I (MATH 1060 and 1061) Fall 2014 Review For The Final ExamCurtis AngstNo ratings yet
- Calculus 1 Exam 2 Prof. Brent Review ProblemsDocument6 pagesCalculus 1 Exam 2 Prof. Brent Review ProblemsguitaristddjNo ratings yet
- Wa0001Document3 pagesWa0001Sympathy BumhiraNo ratings yet
- Homework 8Document4 pagesHomework 8bindumadhavibb2022No ratings yet
- E2 ReviewDocument2 pagesE2 ReviewBad ManNo ratings yet
- 6410Document25 pages6410Ruben Mark Salazar TocasNo ratings yet
- Differentiation of Inverse Trigonometric FunctionsDocument12 pagesDifferentiation of Inverse Trigonometric FunctionsJhalaNo ratings yet
- Tutorial 4Document5 pagesTutorial 4irakool2014No ratings yet
- Derivadas PDFDocument12 pagesDerivadas PDFRocio LEON AYANo ratings yet
- Derivadas PDFDocument12 pagesDerivadas PDFRocio LEON AYANo ratings yet
- Trabajo de DerivadasDocument12 pagesTrabajo de DerivadasRocio LEON AYANo ratings yet
- Derivadas PDFDocument12 pagesDerivadas PDFRocio LEON AYANo ratings yet
- HW3 Solution11Document4 pagesHW3 Solution11youjingyuan196No ratings yet
- Function (DPP-2) : Part - I Single Correct Answer TypeDocument2 pagesFunction (DPP-2) : Part - I Single Correct Answer TypeSunny KumarNo ratings yet
- IdliDocument29 pagesIdliAmit XYZNo ratings yet
- Taller Diagn Stico Ecuaiones DiferencialesDocument2 pagesTaller Diagn Stico Ecuaiones DiferencialesKAROL VANESA HOYOS CONTRERASNo ratings yet
- 3 06f A4Document4 pages3 06f A4ABC CheckNo ratings yet
- Phase Plane Method: Presents byDocument25 pagesPhase Plane Method: Presents byMona AliNo ratings yet
- Continuity - Differetiability Solutions (Exercise 1)Document9 pagesContinuity - Differetiability Solutions (Exercise 1)vidyaidkwtfNo ratings yet
- MSexam Stat 2019F SolutionsDocument11 pagesMSexam Stat 2019F SolutionsRobinson Ortega MezaNo ratings yet
- An4 Ex2Document2 pagesAn4 Ex2chaymaahamou2015No ratings yet
- CQF January 2014 Maths Primer Calculus ExercisesDocument2 pagesCQF January 2014 Maths Primer Calculus ExercisesShravan VenkataramanNo ratings yet
- UNIT # 03 Function: Check Your GraspDocument7 pagesUNIT # 03 Function: Check Your GraspritziscoolNo ratings yet
- Math WorksheetDocument4 pagesMath Worksheettamenegezahegn645No ratings yet
- Derivatives of Inverse Function - Problems and SolutionsDocument11 pagesDerivatives of Inverse Function - Problems and SolutionsYinkci Heart Entertainment StudioNo ratings yet
- Diffrential Equation - Fourier SeriesDocument31 pagesDiffrential Equation - Fourier SeriesjonahNo ratings yet
- 123doc Giai Tich 2 Bai Tap Dai Hoc Bach Khoa TPHCMDocument20 pages123doc Giai Tich 2 Bai Tap Dai Hoc Bach Khoa TPHCMNga HuỳnhNo ratings yet
- 45 An Algorithm For Curve SketchingDocument4 pages45 An Algorithm For Curve SketchingDan AvrukhNo ratings yet
- Math 250: Final Review Answers, Spring 2018: (X, Y) ( 1,2) (X+3y) (X 3y) y (X+3y) (X, Y) (3, 1) X 3y y 1 2 (0, T) (0,0) 1 2Document6 pagesMath 250: Final Review Answers, Spring 2018: (X, Y) ( 1,2) (X+3y) (X 3y) y (X+3y) (X, Y) (3, 1) X 3y y 1 2 (0, T) (0,0) 1 2jake tempoNo ratings yet
- AssignmentDocument1 pageAssignmentHatem SalemNo ratings yet
- Math WorksheetDocument4 pagesMath WorksheetGumball 8No ratings yet
- Đề thi GT1 MI1016 CK 20221 aThu EDocument1 pageĐề thi GT1 MI1016 CK 20221 aThu Eanloll812No ratings yet
- Propagator Greens Function in Quantum MeDocument3 pagesPropagator Greens Function in Quantum Metoby122No ratings yet
- Solved Examples - For - Midterm2Document40 pagesSolved Examples - For - Midterm2Zakaria El BarouniNo ratings yet
- 1 X X X X : Examples: Example 1: Consider The SystemDocument16 pages1 X X X X : Examples: Example 1: Consider The SystemSantiago Garrido BullónNo ratings yet
- Tables of The Legendre Functions P—½+it(x): Mathematical Tables SeriesFrom EverandTables of The Legendre Functions P—½+it(x): Mathematical Tables SeriesNo ratings yet
- Tables of the Function w (z)- e-z2 ? ex2 dx: Mathematical Tables Series, Vol. 27From EverandTables of the Function w (z)- e-z2 ? ex2 dx: Mathematical Tables Series, Vol. 27No ratings yet
- Coding Assignment From XoxodayDocument2 pagesCoding Assignment From XoxodayKESHAV TYAGINo ratings yet
- Subject Matter: General Santos Doctors' Medical School Foundation, IncDocument4 pagesSubject Matter: General Santos Doctors' Medical School Foundation, IncGian Jane Quiñones0% (1)
- 4.8.2 - Game Architecture and DesignDocument2 pages4.8.2 - Game Architecture and Designshashank2shuklaNo ratings yet
- Wikibooks - Windows ProgrammingDocument120 pagesWikibooks - Windows Programmingmhardware100% (1)
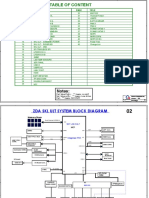
- Acer Chromebook 14 CP5-471 Quanta ZdaDocument44 pagesAcer Chromebook 14 CP5-471 Quanta ZdakuatsuwahyoNo ratings yet
- Maximum Likelihood Programming in Stata: January 2003Document18 pagesMaximum Likelihood Programming in Stata: January 2003nachersNo ratings yet
- Omada SDN Controller - User Guide - REV5.9.0Document467 pagesOmada SDN Controller - User Guide - REV5.9.0terenos-pedroNo ratings yet
- 6 Ancient Civ Black Ships Before Troy FinalDocument6 pages6 Ancient Civ Black Ships Before Troy FinalJovenia GarciaNo ratings yet
- A Call For Prayer of BlessingDocument5 pagesA Call For Prayer of BlessingelijahNo ratings yet
- q3 English Week 6 DLL FinalDocument4 pagesq3 English Week 6 DLL FinalLiezel Manzanillo CruzNo ratings yet
- 2FA Authentication For ABAP StackDocument3 pages2FA Authentication For ABAP StackAdrianNo ratings yet
- Information System Management: Kamal Institute of Higher Education and Advance Technology Lab FileDocument23 pagesInformation System Management: Kamal Institute of Higher Education and Advance Technology Lab FileRudra SinghNo ratings yet
- File System Vs DBMSDocument6 pagesFile System Vs DBMSSahilNo ratings yet
- 19 Test de Evaluare InitialaDocument4 pages19 Test de Evaluare InitialaPhilip HendrixNo ratings yet
- Microprocessor & Peripheral Interfacing Devices: 8254 Programmable Interval TimerDocument8 pagesMicroprocessor & Peripheral Interfacing Devices: 8254 Programmable Interval Timervikas chawlaNo ratings yet
- Class 24: Case Study: Building A Simple Postfix Calculator: Introduction To Computation and Problem SolvingDocument16 pagesClass 24: Case Study: Building A Simple Postfix Calculator: Introduction To Computation and Problem SolvingyekychNo ratings yet
- The Lusiad of Camoens Translated Into English Spencerian Verse (1880)Document594 pagesThe Lusiad of Camoens Translated Into English Spencerian Verse (1880)pomegranate246No ratings yet
- Harold Bloom-Dante AlighieriDocument243 pagesHarold Bloom-Dante AlighieriCaio Franco100% (15)
- Dia de Los Muertos Skulls Lesson PlanDocument3 pagesDia de Los Muertos Skulls Lesson Planapi-235914495No ratings yet
- Week 4 - Matthews & Yip (2009) Contact Induced GrammaticalizationDocument30 pagesWeek 4 - Matthews & Yip (2009) Contact Induced GrammaticalizationcolormemoNo ratings yet
- QRP 2m FM Transceiver Project PDFDocument38 pagesQRP 2m FM Transceiver Project PDFblueword66No ratings yet
- Assignment06Document8 pagesAssignment06edgarNo ratings yet
- Paper On New TestamentDocument17 pagesPaper On New TestamentDesalegn D. DemisieNo ratings yet
- Grades TOPHDocument62 pagesGrades TOPHe1adar94% (16)
- Efi Fiery Fs300pro How-To Print Perfect Bound BookletDocument5 pagesEfi Fiery Fs300pro How-To Print Perfect Bound Bookletandria kasumaNo ratings yet
- Ed 350863Document514 pagesEd 350863Eric LeonardNo ratings yet
- Poetry Poems Compare Contrast - YamDocument10 pagesPoetry Poems Compare Contrast - YamFating DamiaNo ratings yet
- AOMEI Backupper Standard v6.8.0 Free - MediaketDocument2 pagesAOMEI Backupper Standard v6.8.0 Free - MediaketDejan NNo ratings yet
- DACR2RDocument4 pagesDACR2Rsombra1985No ratings yet
- 10.17 Triangle Congruence Proofs Day 2Document33 pages10.17 Triangle Congruence Proofs Day 2RETCHELLE GUILLERMONo ratings yet