You might also like
- Ac Machines 4.1 Synchronous Machines: One Turn From Stator WindingDocument56 pagesAc Machines 4.1 Synchronous Machines: One Turn From Stator WindingmhNo ratings yet
- Bee Unit4 Lecture2Document7 pagesBee Unit4 Lecture2haiderNo ratings yet
- AC MachinesDocument8 pagesAC Machinesprince ian cruzNo ratings yet
- 22 Blade Forces PDFDocument5 pages22 Blade Forces PDFKoesmayadi SeptianNo ratings yet
- Forces On Large Steam Turbine Blades: RWE NpowerDocument5 pagesForces On Large Steam Turbine Blades: RWE NpoweradawNo ratings yet
- Forces On Large Steam Turbine Blades: RWE NpowerDocument5 pagesForces On Large Steam Turbine Blades: RWE Npowermimoune lamraniNo ratings yet
- ReportDocument16 pagesReportMaxx PowerrNo ratings yet
- Problem 13.208: Given: Find: Solution: 1 FU RU FL RLDocument6 pagesProblem 13.208: Given: Find: Solution: 1 FU RU FL RLRaissa BenjaminNo ratings yet
- Presented by Dr. Amrita SinhaDocument15 pagesPresented by Dr. Amrita SinhaHarnam Singh DhillonNo ratings yet
- To Calculate The Torque Generated by Any Arbitrary Three-Phase Motor, While Considering Harmonic Torques Too, (If Any)Document11 pagesTo Calculate The Torque Generated by Any Arbitrary Three-Phase Motor, While Considering Harmonic Torques Too, (If Any)Soumya Ranjan NayakNo ratings yet
- Problems 13-14 Castigliano's MethodDocument5 pagesProblems 13-14 Castigliano's MethodCarl CrawfordNo ratings yet
- Lec-4 Sync Machine 18Document17 pagesLec-4 Sync Machine 18MD.Safaul IslamNo ratings yet
- AP UNIT 4 Loop and Horn Antenna PDFDocument9 pagesAP UNIT 4 Loop and Horn Antenna PDFവി അഖിൽNo ratings yet
- Eletrical Machines (K-Wiki - Synchronous Machines)Document59 pagesEletrical Machines (K-Wiki - Synchronous Machines)qwer100% (1)
- EMII - Lecture 18 - Induction MachinesDocument14 pagesEMII - Lecture 18 - Induction MachinesHassan Al BaityNo ratings yet
- Chapter 1: Fundamentals of Rotating Ac MachinesDocument5 pagesChapter 1: Fundamentals of Rotating Ac MachinesJules KouamNo ratings yet
- Fundamentals of Electric MotorsDocument40 pagesFundamentals of Electric Motorscallsandhya100% (5)
- Lecture 9: Space-Vector Models: ELEC-E8405 Electric Drives (5 ECTS)Document30 pagesLecture 9: Space-Vector Models: ELEC-E8405 Electric Drives (5 ECTS)Yazid AbouchihabeddineNo ratings yet
- EEEE3202-lecture 1Document7 pagesEEEE3202-lecture 1Jules KouamNo ratings yet
- 02 Single Phase Im 02Document8 pages02 Single Phase Im 02Suleiman Abubakar AuduNo ratings yet
- Frictional ClutchDocument44 pagesFrictional ClutchSandip KulkarniNo ratings yet
- Basic Aerodynamics F18 Assignment 3Document45 pagesBasic Aerodynamics F18 Assignment 3Lucas SilveiraNo ratings yet
- Fractional Order MemristorDocument7 pagesFractional Order Memristorusha pawanNo ratings yet
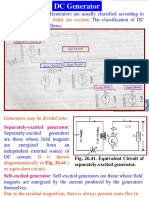
- DC GeneratorsDocument35 pagesDC Generatorssayed Tamir janNo ratings yet
- Module 3 Part 1 - FLywheel Punching Press PDFDocument22 pagesModule 3 Part 1 - FLywheel Punching Press PDFAswith R Shenoy100% (1)
- Polyphase Induction MachinesDocument7 pagesPolyphase Induction Machinespurushg62No ratings yet
- Prob EmecpDocument1 pageProb EmecpMukesh SinghNo ratings yet
- ISV SM Ch30Document46 pagesISV SM Ch30손은결No ratings yet
- Unit Iii - Modelling of Poly Phase Induction MACHINES (9 Hours)Document51 pagesUnit Iii - Modelling of Poly Phase Induction MACHINES (9 Hours)thavaselvanNo ratings yet
- Dynamicstrifilar Suspension 2 JKCRECDocument16 pagesDynamicstrifilar Suspension 2 JKCRECtoecrusher0% (1)
- Lecture 24: Rolling: Dept. of Mechanical Engg., NIT CalicutDocument15 pagesLecture 24: Rolling: Dept. of Mechanical Engg., NIT CalicutManoj MallickNo ratings yet
- Induction MotorDocument6 pagesInduction MotorMuhamad NafianNo ratings yet
- CM Homework 3Document5 pagesCM Homework 3mazhariNo ratings yet
- Electronics A Physical Approach 1st Edition Snoke Solutions ManualDocument19 pagesElectronics A Physical Approach 1st Edition Snoke Solutions ManualChristinaNunezysgtj100% (13)
- Design of A 6 Pole Tunable BPF With Constant Absolute BWDocument4 pagesDesign of A 6 Pole Tunable BPF With Constant Absolute BWindadianNo ratings yet
- Antenna Parameters Are:: 1) What Is The Antenna? Write Short Notes About Its ParametersDocument7 pagesAntenna Parameters Are:: 1) What Is The Antenna? Write Short Notes About Its ParametersSujith ReddyNo ratings yet
- Single-Phase Transformer: 2 Windings (Primary & Secondary) Around A Magnetic Core (Magnetic Coupling)Document10 pagesSingle-Phase Transformer: 2 Windings (Primary & Secondary) Around A Magnetic Core (Magnetic Coupling)Mark Anthony RazonNo ratings yet
- NEET 2022 Question Paper Q-3 17-07-22Document42 pagesNEET 2022 Question Paper Q-3 17-07-22AyushiNo ratings yet
- 1 0 (9.8) 2 S T 1 0 (5.8) 2 S T 1 1 2.0 (9.8) (5.8) 2 2 T T 60 170 TanDocument4 pages1 0 (9.8) 2 S T 1 0 (5.8) 2 S T 1 1 2.0 (9.8) (5.8) 2 2 T T 60 170 TanKok Soon ChongNo ratings yet
- Kuliah 3 2024Document8 pagesKuliah 3 2024Prima DinoNo ratings yet
- Cs Lab Manual in PDFDocument56 pagesCs Lab Manual in PDFvasukonetiNo ratings yet
- HCI H2 PHY P1 Suggested SolutionDocument4 pagesHCI H2 PHY P1 Suggested Solutionllilizheng8No ratings yet
- Ch5 & 6 ReviewDocument43 pagesCh5 & 6 ReviewAnson ChanNo ratings yet
- Single-Phase Transformer: 2 Windings (Primary & Secondary) Around A Magnetic Core (Magnetic Coupling)Document10 pagesSingle-Phase Transformer: 2 Windings (Primary & Secondary) Around A Magnetic Core (Magnetic Coupling)lazypglll001No ratings yet
- 06 AntennacharDocument12 pages06 AntennacharSabinNo ratings yet
- WindDocument17 pagesWindhothotpop13No ratings yet
- Ejercicios FísicaDocument9 pagesEjercicios FísicaMelqui LagunasNo ratings yet
- Ee 212 Ac Induction MotorsDocument9 pagesEe 212 Ac Induction MotorsabigabacNo ratings yet
- EMSP 28jun2023Document9 pagesEMSP 28jun2023Mazz77No ratings yet
- قوي وآلات كهربائيه 3 ت نموذج اجابة 12-2013Document7 pagesقوي وآلات كهربائيه 3 ت نموذج اجابة 12-2013kuchowNo ratings yet
- Full Test-1Document10 pagesFull Test-1Doctor StrangeNo ratings yet
- Proiect AnteneDocument20 pagesProiect AnteneAndrei DuțanNo ratings yet
- General Chemistry: CHEM F111Document22 pagesGeneral Chemistry: CHEM F111Harsh TiwariNo ratings yet
- Are Nuclear and Gavitational Forces of Same NatureDocument12 pagesAre Nuclear and Gavitational Forces of Same NatureCris Villarreal NavarroNo ratings yet
- 5.4 Rotor E.M.F and Frequency: Example 5.1: The Stator of A 3-Phase, 4-Pole Induction Motor IsDocument6 pages5.4 Rotor E.M.F and Frequency: Example 5.1: The Stator of A 3-Phase, 4-Pole Induction Motor IsJOHN MINKHANTNo ratings yet
- Outline of Solutions To Homework 5Document5 pagesOutline of Solutions To Homework 5Jordan MoshcovitisNo ratings yet
- Dwnload Full Electronics A Physical Approach 1st Edition Snoke Solutions Manual PDFDocument36 pagesDwnload Full Electronics A Physical Approach 1st Edition Snoke Solutions Manual PDFowenpatelyt39100% (11)
- Exercises in Electronics: Operational Amplifier CircuitsFrom EverandExercises in Electronics: Operational Amplifier CircuitsRating: 3 out of 5 stars3/5 (1)
- VLF Radio Engineering: International Series of Monographs in Electromagnetic WavesFrom EverandVLF Radio Engineering: International Series of Monographs in Electromagnetic WavesNo ratings yet
- Modern Electrical Installation for Craft StudentsFrom EverandModern Electrical Installation for Craft StudentsRating: 4.5 out of 5 stars4.5/5 (4)
- Electricity and Magnetism ReviewDocument5 pagesElectricity and Magnetism Reviewapi-293785590No ratings yet
- HW21Document4 pagesHW21李長青No ratings yet
- Solid State (Exercise)Document35 pagesSolid State (Exercise)Vishu PatryNo ratings yet
- 17 - Pret Piese LinhaiDocument52 pages17 - Pret Piese LinhaiSebastian FlorescuNo ratings yet
- Processing of Soft Magnetic Materials by Powder MeDocument12 pagesProcessing of Soft Magnetic Materials by Powder MeedumacerenNo ratings yet
- Simplified Magnetic Fie1.d Modeling and Calculation of Reactor CoilsDocument3 pagesSimplified Magnetic Fie1.d Modeling and Calculation of Reactor CoilsNestor VasquezNo ratings yet
- 2021 - Types of Magnets - Monday 22nd NovemberDocument14 pages2021 - Types of Magnets - Monday 22nd NovemberSheldon MusiinzaNo ratings yet
- Magnet TherapyDocument5 pagesMagnet TherapyFilip Ilic100% (1)
- Week-09 Assignment Q1. Which of The Following Is/are TrueDocument5 pagesWeek-09 Assignment Q1. Which of The Following Is/are TrueDeep GandhiNo ratings yet
- Physical Science Grade 10 Teachers Guide - Siyavula Webbook 1.1 PDFDocument57 pagesPhysical Science Grade 10 Teachers Guide - Siyavula Webbook 1.1 PDFAnonymous qtXUqVOeAUNo ratings yet
- Lesson 3C - Steady State Operation of Synchronous MotorDocument26 pagesLesson 3C - Steady State Operation of Synchronous MotorJay LopezNo ratings yet
- IGCSE Physics Exam Revision NotesDocument34 pagesIGCSE Physics Exam Revision NotesCoolman Poon88% (17)
- MAGNETISM AND MATTER NotesDocument9 pagesMAGNETISM AND MATTER NotesWill The WiseNo ratings yet
- Churchland - The Rediscovery of LightDocument19 pagesChurchland - The Rediscovery of LightMaríaMaríaNo ratings yet
- Inductance of A Bundled ConductorDocument19 pagesInductance of A Bundled ConductorKim CentenoNo ratings yet
- William Gilbert and MagnetismDocument2 pagesWilliam Gilbert and MagnetismDhāraṇe KusalaNo ratings yet
- 1.solid State BookDocument33 pages1.solid State Bookashok pradhanNo ratings yet
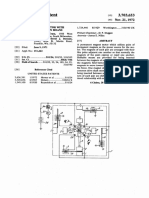
- Reciprocating Motor US3703653Document10 pagesReciprocating Motor US3703653SkripacNo ratings yet
- Single Phase Induction Motor Winding FormulaDocument2 pagesSingle Phase Induction Motor Winding FormulaJederson ColaresNo ratings yet
- TRB Circuit Theory Test 1Document6 pagesTRB Circuit Theory Test 1Ragunathan NarayananNo ratings yet
- AGN 017 - Unbalanced Loads: Application Guidance Notes: Technical Information From Cummins Generator TechnologiesDocument9 pagesAGN 017 - Unbalanced Loads: Application Guidance Notes: Technical Information From Cummins Generator TechnologiesJhay Phee LlorenteNo ratings yet
- Grade 10 STE Electronics Robotics Q4 Module 3 Wk3 ADMDocument28 pagesGrade 10 STE Electronics Robotics Q4 Module 3 Wk3 ADMPorferio Abanggan100% (1)
- Hargreaves, 12 (3 Year)Document228 pagesHargreaves, 12 (3 Year)Maycon Maran0% (1)
- Assure AU Physics SyllabusDocument3 pagesAssure AU Physics SyllabussNo ratings yet
- 2.sumpner's Test On A Pair of Single Phase TransformersDocument5 pages2.sumpner's Test On A Pair of Single Phase Transformerschandrakanth100% (2)
- ws33739 A AllDocument19 pagesws33739 A Allshellfire6No ratings yet
- Grade 10 Physics L1 FeedbackDocument3 pagesGrade 10 Physics L1 FeedbackYonasNo ratings yet
- Magnetic Materials: Maximum Torque N I S BDocument15 pagesMagnetic Materials: Maximum Torque N I S BAdriana PetrieNo ratings yet
- Grade 10 - Science - CompleteDocument19 pagesGrade 10 - Science - CompleteLucille Gacutan AramburoNo ratings yet
- Sem Question BanksDocument3 pagesSem Question BanksthangarajelectresNo ratings yet