You might also like
- Training and Human Resource Considerations for Nuclear Facility DecommissioningFrom EverandTraining and Human Resource Considerations for Nuclear Facility DecommissioningNo ratings yet
- Fundamental Design and Automation Technologies in Offshore RoboticsFrom EverandFundamental Design and Automation Technologies in Offshore RoboticsHamid Reza KarimiNo ratings yet
- nchrp20-07 (259) FRDocument120 pagesnchrp20-07 (259) FRAfshan AshrafNo ratings yet
- Cait Utc Nc24 FinalDocument133 pagesCait Utc Nc24 FinalBruno CarvalheiroNo ratings yet
- LM Final ReportDocument546 pagesLM Final ReportTushar Sonar MainNo ratings yet
- IDEA Safety 17Document34 pagesIDEA Safety 17mariah.hafeez4474No ratings yet
- Transit32 Final ReportDocument16 pagesTransit32 Final Report05 saikumar basnaleNo ratings yet
- Railroad Bridge Dynamics and Ratings: Rail Safety IDEA ProgramDocument34 pagesRailroad Bridge Dynamics and Ratings: Rail Safety IDEA ProgramdiablopapanatasNo ratings yet
- Safety 25Document40 pagesSafety 25diablopapanatasNo ratings yet
- nchrp121 Final ReportDocument34 pagesnchrp121 Final ReportLIKHITHA GOGULAPATINo ratings yet
- Major Equipment Life-Cycle Cost AnalysisDocument107 pagesMajor Equipment Life-Cycle Cost Analysisedubittar100% (1)
- Lithium-Ion Battery Pros and Cons StudiedDocument126 pagesLithium-Ion Battery Pros and Cons StudieddiwhiteNo ratings yet
- lithium_batteries_lcaDocument127 pageslithium_batteries_lcarijalsolahuddinNo ratings yet
- Hamburg Wheel Track Test Requirements NCHRP - w219Document88 pagesHamburg Wheel Track Test Requirements NCHRP - w219Max Cedeño De LeónNo ratings yet
- Best Practices in Shared Use High SpeedDocument115 pagesBest Practices in Shared Use High SpeedDe'Von JNo ratings yet
- LTRC 22-1ST Final Report No. 665 Investigating and Developing A MASH Compliant Contraflow Ramp Closure GateDocument33 pagesLTRC 22-1ST Final Report No. 665 Investigating and Developing A MASH Compliant Contraflow Ramp Closure GatewalaywanNo ratings yet
- 2015equipment Benchmark Study ReportDocument55 pages2015equipment Benchmark Study ReportBruno SilvaNo ratings yet
- Dot 19808 DS1Document176 pagesDot 19808 DS1Amul ShresthaNo ratings yet
- Dot 35651 DS1Document71 pagesDot 35651 DS1Huỳnh Kiều OanhNo ratings yet
- Ambulance Vehicle Operator: Driver Behavior and Performance Checklist (D1)Document25 pagesAmbulance Vehicle Operator: Driver Behavior and Performance Checklist (D1)Ronald AranhaNo ratings yet
- Final Report XyzDocument312 pagesFinal Report XyzMalkeet SinghNo ratings yet
- Safety 38Document42 pagesSafety 38Praveen KumarNo ratings yet
- NCHRP09-23 Part2 FRDocument370 pagesNCHRP09-23 Part2 FRAlexander SolerNo ratings yet
- Elevator and Escalator Maintenance and Safety Practices (2012)Document67 pagesElevator and Escalator Maintenance and Safety Practices (2012)NinNo ratings yet
- AG D Vissim-B M T S M: Uide To Ocumenting Ased Icroscopic Raffic Imulation OdelsDocument64 pagesAG D Vissim-B M T S M: Uide To Ocumenting Ased Icroscopic Raffic Imulation OdelsMaria De La Buena Esperanza Sandoval LopezNo ratings yet
- Heavy Vehicle Load Simulator for Bridge TestingDocument58 pagesHeavy Vehicle Load Simulator for Bridge Testingsurajitkundu2002No ratings yet
- Assisting Vision-Impaired Pedestrians To Cross Streets: An Innovative Acoustic Ranging ApproachDocument49 pagesAssisting Vision-Impaired Pedestrians To Cross Streets: An Innovative Acoustic Ranging ApproachHüseyinNo ratings yet
- Asset Management Data CollectionDocument138 pagesAsset Management Data CollectionTATATAHERNo ratings yet
- Graphene Nanoplatelet (GNP) Reinforced Asphalt Mixtures: A Novel Multifunctional Pavement MaterialDocument39 pagesGraphene Nanoplatelet (GNP) Reinforced Asphalt Mixtures: A Novel Multifunctional Pavement MaterialMIGUEL VARGASNo ratings yet
- LID Design Manual PDFDocument147 pagesLID Design Manual PDFZdeslav KarlovacNo ratings yet
- Evaluation of BMPs For Highway Runoff ControlDocument147 pagesEvaluation of BMPs For Highway Runoff Controlzdeslav karlovacNo ratings yet
- The Object Dedection Capabilities of The Bathymetry System - ENDocument84 pagesThe Object Dedection Capabilities of The Bathymetry System - ENutkuNo ratings yet
- Evaluating Environmental Impact of Traffic Congestion in Real Time Using Crowd-Sourced DataDocument59 pagesEvaluating Environmental Impact of Traffic Congestion in Real Time Using Crowd-Sourced DataTrần Hải NgọcNo ratings yet
- Bun BunDocument304 pagesBun BunAlexandra Elena BalanoiuNo ratings yet
- HDM Method PDFDocument117 pagesHDM Method PDFBonagiri DheerajNo ratings yet
- Bridge Element Deterioration Rates PDFDocument105 pagesBridge Element Deterioration Rates PDFnguoi_co_docNo ratings yet
- Final Report BangladeshDocument54 pagesFinal Report Bangladesh임동우No ratings yet
- Greenroads: A Sustainability Performance Metric For Roadway Design and ConstructionDocument67 pagesGreenroads: A Sustainability Performance Metric For Roadway Design and ConstructionPradip SarkerNo ratings yet
- Hif 18031Document293 pagesHif 18031Manuel MirandaNo ratings yet
- Fleet Asset Life Cycle Costing With Intelligent VehiclesDocument171 pagesFleet Asset Life Cycle Costing With Intelligent VehiclesAdolfo CasillaVargasNo ratings yet
- Guide to Roadside OD StudiesDocument152 pagesGuide to Roadside OD StudiesAshok RajanavarNo ratings yet
- Sliding Scale ContingenciesDocument215 pagesSliding Scale Contingenciesousmi2005No ratings yet
- ESCAP 2014 RP Prefeasibility Study Upgrading Jessore-Banpara Highway AH2 MyanmarDocument51 pagesESCAP 2014 RP Prefeasibility Study Upgrading Jessore-Banpara Highway AH2 Myanmarwin thuNo ratings yet
- 05 cr2Document27 pages05 cr2Errol KausimaeNo ratings yet
- 100yearsbridgelife - Tests On SlidingmaterialsDocument468 pages100yearsbridgelife - Tests On Slidingmaterialsjakelong87No ratings yet
- NCHRP Webdoc 45Document129 pagesNCHRP Webdoc 45Zainab A. AbdulstaarNo ratings yet
- The National Academies PressDocument216 pagesThe National Academies PressPABLO MAURONo ratings yet
- GapAnalysisTool Users-Guide v1.00Document128 pagesGapAnalysisTool Users-Guide v1.00mabkhout aliwiNo ratings yet
- NCHRP RPT 424Document136 pagesNCHRP RPT 424victorNo ratings yet
- Bai Y., Sustainable Transportation Systems - Plan, Design, Build, Manage, and Maintain, 2012 PDFDocument720 pagesBai Y., Sustainable Transportation Systems - Plan, Design, Build, Manage, and Maintain, 2012 PDFP. Guderian MainsteinNo ratings yet
- Precision Estimates of AASHTO T148 - Measuring Length of Drilled Concrete Cores PDFDocument30 pagesPrecision Estimates of AASHTO T148 - Measuring Length of Drilled Concrete Cores PDFYaselaNo ratings yet
- 30003L4K PDFDocument117 pages30003L4K PDFj_diego_cheNo ratings yet
- Emerging Nanotechnologies For Site Remediation and Wastewater TreatmentDocument55 pagesEmerging Nanotechnologies For Site Remediation and Wastewater Treatment3bdullaNo ratings yet
- Uic-Jrp1 - Correlations Between Rail Defect Growth DataDocument103 pagesUic-Jrp1 - Correlations Between Rail Defect Growth DataBruno PerlesNo ratings yet
- Earthwork Haul-Truck Cycle-Time Monitoring Case Study W CVRDocument57 pagesEarthwork Haul-Truck Cycle-Time Monitoring Case Study W CVRvarity butheleziNo ratings yet
- CFD Vision 2030 StudyDocument58 pagesCFD Vision 2030 StudyLeandro SalvianoNo ratings yet
- The National Academies Press: Guidebook For Deploying Zero-Emission Transit Buses (2020)Document182 pagesThe National Academies Press: Guidebook For Deploying Zero-Emission Transit Buses (2020)andrea bottazziNo ratings yet
- Life-Cycle Cost Model For Evaluating The Sustainability of Bridge DecksDocument132 pagesLife-Cycle Cost Model For Evaluating The Sustainability of Bridge DecksAli KhalafNo ratings yet
- 0 4020 P2 PDFDocument28 pages0 4020 P2 PDFArun MohanNo ratings yet
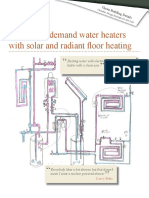
- Synergy of Demand Water Heaters With Solar and Radiant Floor HeatingDocument5 pagesSynergy of Demand Water Heaters With Solar and Radiant Floor HeatingKhurram ShahzadNo ratings yet
- List of Lda Approved SchemesDocument5 pagesList of Lda Approved Schemesijazaslam999No ratings yet
- DownloadDocument1 pageDownloadKhurram ShahzadNo ratings yet
- Regular Membership Defence PersonnelDocument2 pagesRegular Membership Defence PersonnelKhurram ShahzadNo ratings yet
- Senior Project Proposal FormDocument2 pagesSenior Project Proposal FormKhurram ShahzadNo ratings yet
- Driver Fatigue Detection Based On Eye TrackingDocument2 pagesDriver Fatigue Detection Based On Eye TrackingAnonymous jxm0WNS7QaNo ratings yet
- Acknowledgment: George & Also To Our Group Guide Asst. Prof. Simy M Baby, For Their Valuable Guidance and HelpDocument50 pagesAcknowledgment: George & Also To Our Group Guide Asst. Prof. Simy M Baby, For Their Valuable Guidance and HelpKhurram ShahzadNo ratings yet
- Senior Project Proposal FormDocument2 pagesSenior Project Proposal FormKhurram ShahzadNo ratings yet
- Here Is A Remote Operated Spy Robot Circuit Which Can Be Controlled by Using A Wireless Remote ControllerDocument6 pagesHere Is A Remote Operated Spy Robot Circuit Which Can Be Controlled by Using A Wireless Remote ControllerKhurram ShahzadNo ratings yet
- Weld TestingDocument51 pagesWeld TestingKhurram ShahzadNo ratings yet
- FEE FYP 2012-13: Faculty of Electronic Engineering Ghulam Ishaq Khan Institute of Engineering Sciences and TechnologyDocument2 pagesFEE FYP 2012-13: Faculty of Electronic Engineering Ghulam Ishaq Khan Institute of Engineering Sciences and TechnologyKhurram ShahzadNo ratings yet
- Welding Safety: 29 CFR 1926.350-354 Subpart JDocument53 pagesWelding Safety: 29 CFR 1926.350-354 Subpart JDharmendra RajanNo ratings yet
- Visual Inspection of Tanks & Pressure VesselsDocument29 pagesVisual Inspection of Tanks & Pressure VesselsShahul Hameed Razik100% (5)
- List of Air CompressorDocument1 pageList of Air CompressorKhurram ShahzadNo ratings yet
- Inspection and TestingDocument19 pagesInspection and TestingMallesh KaruparthyNo ratings yet
- m511 EN LVDDocument5 pagesm511 EN LVDKhurram ShahzadNo ratings yet
- SMAW Pipe Welding TechniquesDocument35 pagesSMAW Pipe Welding Techniquesmiradeel100% (4)
- Khurram Shahzad: Curriculum VitaeDocument3 pagesKhurram Shahzad: Curriculum VitaeKhurram ShahzadNo ratings yet
- SMAW PowerpointDocument28 pagesSMAW PowerpointShankar Gurusamy100% (3)
- Wireless Device Network Activity ReportDocument1 pageWireless Device Network Activity ReportKhurram ShahzadNo ratings yet
- Wireless Device Network Activity ReportDocument1 pageWireless Device Network Activity ReportKhurram ShahzadNo ratings yet
- Khurram Shahzad: Curriculum VitaeDocument3 pagesKhurram Shahzad: Curriculum VitaeKhurram ShahzadNo ratings yet
- Assignment #2, IM: Due Date: 03 Jan 13Document1 pageAssignment #2, IM: Due Date: 03 Jan 13Khurram ShahzadNo ratings yet
- HUAWEI DBS3900 Dual-Mode Base Station Hardware Structure and Pinciple-20090223-IsSUE1.0-BDocument79 pagesHUAWEI DBS3900 Dual-Mode Base Station Hardware Structure and Pinciple-20090223-IsSUE1.0-BUdo Elisha UcheNo ratings yet
- Northern Power Generation Company Limited Recrutiment Test Content WeightagesDocument1 pageNorthern Power Generation Company Limited Recrutiment Test Content WeightagesSyed Ali RazaNo ratings yet
- MS224 Engineering Economics Assignment 1 SolutionsDocument5 pagesMS224 Engineering Economics Assignment 1 SolutionsKhurram ShahzadNo ratings yet
- Weekly Schedule Template 6-7Document2 pagesWeekly Schedule Template 6-7zazasanNo ratings yet
- Chemistry 2810 A Assignment AnswersDocument11 pagesChemistry 2810 A Assignment Answershodaps.ggsNo ratings yet
- The Role of Bismuth in The SOHIO ProcessDocument39 pagesThe Role of Bismuth in The SOHIO ProcessMarnel Roy MayorNo ratings yet
- A3 - Advances in Computational Fluid Dynamics (CFD) Modeling of InCylinder Biodiesel CombustionDocument18 pagesA3 - Advances in Computational Fluid Dynamics (CFD) Modeling of InCylinder Biodiesel CombustionEverton Luiz Dias da SilvaNo ratings yet
- Topic II Basic Principles of Extraction of Metals From Ores & PurificationDocument31 pagesTopic II Basic Principles of Extraction of Metals From Ores & PurificationKing of KingsNo ratings yet
- Group 4A and 5A elements overviewDocument4 pagesGroup 4A and 5A elements overviewMayMenderoNo ratings yet
- Formaldehyde Plant, Formaldehyde Equipment, Formalin Plant, Formadehyde TechnDocument6 pagesFormaldehyde Plant, Formaldehyde Equipment, Formalin Plant, Formadehyde TechnMuhammad KhurramNo ratings yet
- A Level Environmental Chemistry notes summaryDocument14 pagesA Level Environmental Chemistry notes summarymaxwell Mutare100% (1)
- Chemistry: JC-2 Examination Papers 2013Document1,601 pagesChemistry: JC-2 Examination Papers 2013potatoonacouchNo ratings yet
- KMnO4 Vs Mohrs Salt TitrationDocument3 pagesKMnO4 Vs Mohrs Salt TitrationgreekyNo ratings yet
- Chapter 1 Some Basic Concepts of ChemistryDocument50 pagesChapter 1 Some Basic Concepts of Chemistrysumit100% (1)
- KULIAH BIOKIMIA DASAR - Dr. Chusnul HanimDocument51 pagesKULIAH BIOKIMIA DASAR - Dr. Chusnul HanimMuhammad JuhanNo ratings yet
- Study On Pitting Corrosion of Storage Tank Bottom Steel in Acidic Condition Using Acoustic EmissionDocument12 pagesStudy On Pitting Corrosion of Storage Tank Bottom Steel in Acidic Condition Using Acoustic EmissionAnonymous hBBam1nNo ratings yet
- Apple Oxidation Experiment Shows How Lemon Juice Prevents BrowningDocument8 pagesApple Oxidation Experiment Shows How Lemon Juice Prevents BrowningEverth MoralesNo ratings yet
- A Homemade BatteryDocument5 pagesA Homemade BatteryNicholas KuekNo ratings yet
- Chapter 20: Electrochemistry: Homework QuestionsDocument2 pagesChapter 20: Electrochemistry: Homework Questionservaldi0% (1)
- Science X Summative Assessment Term I Sample PapersDocument44 pagesScience X Summative Assessment Term I Sample PapersApex InstituteNo ratings yet
- Redox For Main Polymerization of Emulsion PolymersDocument6 pagesRedox For Main Polymerization of Emulsion PolymersFranco CarliNo ratings yet
- Organometallic Chemistry: An Overview of Structures and ReactionsDocument28 pagesOrganometallic Chemistry: An Overview of Structures and ReactionsPadyala SriramNo ratings yet
- Half Yearly Examination Session - 2013-14 Class - XI Subject - English Time: 3 Hrs. M.M.: 80Document61 pagesHalf Yearly Examination Session - 2013-14 Class - XI Subject - English Time: 3 Hrs. M.M.: 80Adarsh SharmaNo ratings yet
- Masti Oksidacija Lipidi Oksidacija Inicijacija Propagacija) TerminaijaDocument60 pagesMasti Oksidacija Lipidi Oksidacija Inicijacija Propagacija) TerminaijaAleksandar TeodovskiNo ratings yet
- Hill ReactionDocument8 pagesHill ReactionSharmadevan SundrasegaranNo ratings yet
- Oxidación - Reducción: Instituto Politécnico NacionalDocument10 pagesOxidación - Reducción: Instituto Politécnico NacionalDiego ArriagaNo ratings yet
- Plasma-Controlled Chemistry in Plasma Reforming of MethaneDocument10 pagesPlasma-Controlled Chemistry in Plasma Reforming of MethaneViệtDũng TôNo ratings yet
- Electrochemistry WorksheetDocument4 pagesElectrochemistry WorksheetLtHenry0% (1)
- Indian Association of Chemistry Teachers: National Standard Examination in Chemistry (Nsec) 2018-19Document27 pagesIndian Association of Chemistry Teachers: National Standard Examination in Chemistry (Nsec) 2018-19sankalp somaniNo ratings yet
- Analytical Chemistry 1Document93 pagesAnalytical Chemistry 1eslamelnashar55No ratings yet
- STABILITYDocument10 pagesSTABILITYNishamolKSNo ratings yet
- Graphitization of Cast IronDocument53 pagesGraphitization of Cast IronNiteshRai100% (1)
- Standardization of Potassium Permanganate Solution With Standard Sodium Oxalate SolutionDocument14 pagesStandardization of Potassium Permanganate Solution With Standard Sodium Oxalate SolutionMd Rokibul HassanNo ratings yet
- Efficient CO2 Utilization Via A Hybrid Na-CO2 System Based On CO2 DissolutionDocument27 pagesEfficient CO2 Utilization Via A Hybrid Na-CO2 System Based On CO2 DissolutionDíaz CristianNo ratings yet