You might also like
- A-level Maths Revision: Cheeky Revision ShortcutsFrom EverandA-level Maths Revision: Cheeky Revision ShortcutsRating: 3.5 out of 5 stars3.5/5 (8)
- The Pulled Spool: by Henrik Berg Department of Engineering and Physics Analytical Mechanics - FYGB08 December, 2016Document19 pagesThe Pulled Spool: by Henrik Berg Department of Engineering and Physics Analytical Mechanics - FYGB08 December, 2016omkarNo ratings yet
- Full Free Motion of Celestial Bodies Around a Central Mass - Why Do They Mostly Orbit in the Equatorial Plane?From EverandFull Free Motion of Celestial Bodies Around a Central Mass - Why Do They Mostly Orbit in the Equatorial Plane?No ratings yet
- Circular-Motion #1Document10 pagesCircular-Motion #1Nikoli MajorNo ratings yet
- A-level Physics Revision: Cheeky Revision ShortcutsFrom EverandA-level Physics Revision: Cheeky Revision ShortcutsRating: 3 out of 5 stars3/5 (10)
- Constant acceleration motionDocument25 pagesConstant acceleration motionExceed DivinagraciaNo ratings yet
- Lag Rang Ian Dynamic Formulation of A Four-Bar MechanismDocument7 pagesLag Rang Ian Dynamic Formulation of A Four-Bar MechanismpradeepkumaruvNo ratings yet
- Applications of Derivatives Rate of Change (Calculus) Mathematics Question BankFrom EverandApplications of Derivatives Rate of Change (Calculus) Mathematics Question BankNo ratings yet
- FD Lab5Document13 pagesFD Lab5Carlos RodríguezNo ratings yet
- Fourier Series and Transform ExplainedDocument16 pagesFourier Series and Transform ExplainedSalvacion BandoyNo ratings yet
- FEA Project Report - Alireza KhorshidiDocument11 pagesFEA Project Report - Alireza KhorshidicvcNo ratings yet
- Advanced Structural Analysis: Slope-Deflection EquationsDocument25 pagesAdvanced Structural Analysis: Slope-Deflection EquationsyousifNo ratings yet
- MODULE 2. Kinematics of ParticlesDocument24 pagesMODULE 2. Kinematics of ParticlesAron H OcampoNo ratings yet
- Material 2 - Modelling DC Motor Transfer Function 1Document3 pagesMaterial 2 - Modelling DC Motor Transfer Function 1AnutNo ratings yet
- REPORTDocument6 pagesREPORTEnes sağnakNo ratings yet
- Fórmulas Básicas de DerivaciónDocument2 pagesFórmulas Básicas de DerivaciónRafael RamirezNo ratings yet
- PHY103E EEE SS Waves 4Document12 pagesPHY103E EEE SS Waves 4Robiul Islam RobinNo ratings yet
- Leme 18 NovDocument1 pageLeme 18 NovJosé Teixeira da MottaNo ratings yet
- Mech 1 Module 2 Unit 1 (Forces and Components)Document16 pagesMech 1 Module 2 Unit 1 (Forces and Components)BryanHarold BrooNo ratings yet
- FLUID MECHANICS QUESTIONSDocument12 pagesFLUID MECHANICS QUESTIONSnaiaraNo ratings yet
- Friction Clutches 2020 CompressedDocument14 pagesFriction Clutches 2020 Compressedfikadu435No ratings yet
- Negative Integer and Fractional Order Differential Calculus by Ejiro Inije.Document10 pagesNegative Integer and Fractional Order Differential Calculus by Ejiro Inije.Ejiro InijeNo ratings yet
- الحل النموذجي لواجب التماثلDocument5 pagesالحل النموذجي لواجب التماثلAhmed AbdulqaderNo ratings yet
- Fórmulas de IntegraciónDocument1 pageFórmulas de IntegraciónArturo RVNo ratings yet
- HPM SolutionDocument2 pagesHPM SolutionEbubechim Chiburikem Ogunka-NnokaNo ratings yet
- L2 - Satellite Orbital Motion - P2Document20 pagesL2 - Satellite Orbital Motion - P2Anil SubediNo ratings yet
- Report SaikatDocument21 pagesReport Saikatbhaumik patelNo ratings yet
- 13 Two Dimensional Laplace Equation L3Document13 pages13 Two Dimensional Laplace Equation L3jeetu soniNo ratings yet
- EMD610S Rigid Body Dynamics Plane MotionDocument23 pagesEMD610S Rigid Body Dynamics Plane MotionCheccu PjanicNo ratings yet
- Most Probable VelocityDocument2 pagesMost Probable VelocitybatazaiNo ratings yet
- ME223-Lecture 29 Torsion Stress FunctionDocument14 pagesME223-Lecture 29 Torsion Stress FunctionArushiNo ratings yet
- Che 303 (Transport Phenomena) : Lecture 3 - Continuity EquationDocument5 pagesChe 303 (Transport Phenomena) : Lecture 3 - Continuity Equationodubade opeyemiNo ratings yet
- Vector Mechanics For Engineers: DynamicsDocument8 pagesVector Mechanics For Engineers: DynamicsJoshuaNo ratings yet
- Differentation KinematicsDocument26 pagesDifferentation KinematicsndnonoNo ratings yet
- Ix PhyDocument4 pagesIx PhygamingdragoflamesNo ratings yet
- M/MY/1 Bulk Service Queuing Model AnalysisDocument15 pagesM/MY/1 Bulk Service Queuing Model AnalysisAnisha GargNo ratings yet
- Definite-Integral-and-The-Fundamental-Theorem-of-CalculusDocument4 pagesDefinite-Integral-and-The-Fundamental-Theorem-of-CalculusshiiextraNo ratings yet
- Equation Appendix Final ExamDocument5 pagesEquation Appendix Final ExamDhanush raoNo ratings yet
- Chapter-3 Load Frequency Control, Control Area ConceptDocument35 pagesChapter-3 Load Frequency Control, Control Area Conceptfiraol temesgenNo ratings yet
- PEP 2022 Phase 1 Selection Test 1 - SolutionDocument6 pagesPEP 2022 Phase 1 Selection Test 1 - SolutionMarcus PoonNo ratings yet
- The Secant MethodDocument7 pagesThe Secant MethodShahid KhanNo ratings yet
- Complex_Analysis_Spring_2023_HW_10Document2 pagesComplex_Analysis_Spring_2023_HW_10asampathNo ratings yet
- Modelling of Bridge-Vehicle SystemDocument3 pagesModelling of Bridge-Vehicle SystemanirbanNo ratings yet
- Maxwell-Boltzmann Distribution LawDocument5 pagesMaxwell-Boltzmann Distribution LawbatazaiNo ratings yet
- Forces and ComponentsDocument16 pagesForces and ComponentsToshiko Zayrim BloodNo ratings yet
- Equations of Simple Harmonic MotionDocument15 pagesEquations of Simple Harmonic MotionSansen ColipanoNo ratings yet
- Easy Notes On Mechanics Moment of Inertia PDFDocument48 pagesEasy Notes On Mechanics Moment of Inertia PDFFaisal Shabbir0% (2)
- Exercice moufid: Finding the roots and properties of a complex polynomialDocument2 pagesExercice moufid: Finding the roots and properties of a complex polynomialTEST - TESTNo ratings yet
- Unit-Iiic DevcDocument14 pagesUnit-Iiic Devc464-JALLA GANESHNo ratings yet
- Pgmath2023 SolutionsDocument3 pagesPgmath2023 Solutionspublicacc71No ratings yet
- Algebraic Logarithmic and Exponential: Differentiation of Functions Differentiation of FunctionsDocument3 pagesAlgebraic Logarithmic and Exponential: Differentiation of Functions Differentiation of FunctionsChristine DLNo ratings yet
- Spatial MechanismsDocument40 pagesSpatial MechanismsErico EricNo ratings yet
- 0512.3543.2022a2 solDocument9 pages0512.3543.2022a2 solSapir HarelNo ratings yet
- 4 PrintDocument8 pages4 PrintsubyNo ratings yet
- Diff. Calc. Module 7 Trigonometric & Inverse FunctionsDocument10 pagesDiff. Calc. Module 7 Trigonometric & Inverse FunctionsFernandez DanielNo ratings yet
- Chap 3 Rotating Discs and CylindersDocument9 pagesChap 3 Rotating Discs and CylindersRUGERO KeslyneNo ratings yet
- P10 11bDocument4 pagesP10 11bPrayoga AgustoNo ratings yet
- Math ExamDocument9 pagesMath ExamMalik AsadNo ratings yet
- DLL - Math 4 - Q1 - W1Document2 pagesDLL - Math 4 - Q1 - W1Sarah Visperas RogasNo ratings yet
- CL-X LP13 Simplifying RadicalsDocument2 pagesCL-X LP13 Simplifying RadicalsTshering TashiNo ratings yet
- Motivating Mahidol University International Demonstration School Grade 10 Students To Speak More English Outside ClassroomDocument4 pagesMotivating Mahidol University International Demonstration School Grade 10 Students To Speak More English Outside Classroomapi-428119706No ratings yet
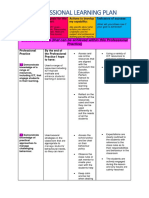
- Professional Development Implementation PlanDocument6 pagesProfessional Development Implementation Planapi-508334903No ratings yet
- 1 FFC 0 Bbaef 6 Ecb 26 Af 17Document2 pages1 FFC 0 Bbaef 6 Ecb 26 Af 17api-343367502No ratings yet
- Physical Science: Quarter 1 - Module 9: CatalystDocument24 pagesPhysical Science: Quarter 1 - Module 9: CatalystMary Ann Isanan75% (8)
- Professional Learning PlanDocument6 pagesProfessional Learning Planapi-425784694No ratings yet
- G7 DLL Mapeh Health Q3-4Document3 pagesG7 DLL Mapeh Health Q3-4Junior FelipzNo ratings yet
- Module 3 - Uniform Rectilinear MotionDocument4 pagesModule 3 - Uniform Rectilinear MotionLvly FranciaNo ratings yet
- 8 Hallmarks of An Effective Teaching in NursingDocument45 pages8 Hallmarks of An Effective Teaching in NursingInsatiable CleeNo ratings yet
- Extra ExercisesDocument55 pagesExtra ExercisesCamilo MartinezNo ratings yet
- Thermochemistry and Reaction Mechanisms of Nitromethane IgnitionDocument15 pagesThermochemistry and Reaction Mechanisms of Nitromethane IgnitionDevis anugraNo ratings yet
- Mail Merge DLLDocument3 pagesMail Merge DLLBenje Paolo Ramoso100% (1)
- Senior High Classroom Instruction Delivery Alignment Map for Understanding Society, Culture & PoliticsDocument2 pagesSenior High Classroom Instruction Delivery Alignment Map for Understanding Society, Culture & PoliticsAntonio C. Cayetano100% (2)
- Curriculum and Instructional Materials GuideDocument50 pagesCurriculum and Instructional Materials GuideANGELITA A JOCSONNo ratings yet
- Factors Affecting Numeracy Levels of Elementary Students in the PhilippinesDocument3 pagesFactors Affecting Numeracy Levels of Elementary Students in the PhilippinesJuliana Marrey P. AgnoteNo ratings yet
- Professional Goals Plan 1 1Document5 pagesProfessional Goals Plan 1 1api-297284721No ratings yet
- Megan Gill ResumeDocument3 pagesMegan Gill Resumemegan_gill1No ratings yet
- Implementation of Saturday ClassesDocument1 pageImplementation of Saturday Classesjennifer1caparinoNo ratings yet
- Admmodule Stem Gp12kin Ic 25Document26 pagesAdmmodule Stem Gp12kin Ic 25Diana Silva HernandezNo ratings yet
- IPCC AR6 SYR LongerReportDocument85 pagesIPCC AR6 SYR LongerReportThalita DalbeloNo ratings yet
- Smartclass Proposal For 1 Classrooms ContentDocument7 pagesSmartclass Proposal For 1 Classrooms ContentAmol GadeNo ratings yet
- Interactive LessonsDocument14 pagesInteractive Lessonsapi-405869670No ratings yet
- Andrea Tkach Letter of Reference Psiii 2018Document2 pagesAndrea Tkach Letter of Reference Psiii 2018api-360126042No ratings yet
- Form 3 t2 Catap Continue and Avoid TemplateDocument1 pageForm 3 t2 Catap Continue and Avoid Templateapi-591558085No ratings yet
- Paula Fernandez ResumeDocument3 pagesPaula Fernandez ResumePaula FernandezNo ratings yet
- Race 1 1686742220Document3 pagesRace 1 1686742220xenonverd321No ratings yet
- Amanda Levy Mchugh ResumeDocument2 pagesAmanda Levy Mchugh Resumeapi-311553306No ratings yet
- Chapter 8 Full SolutionsDocument26 pagesChapter 8 Full SolutionsaerameyNo ratings yet
- How MADE EASY helped me crack competitive examsDocument2 pagesHow MADE EASY helped me crack competitive examsbharatreddy9No ratings yet